 怎么在Vitis加速设计中为Kernel创建面积约束
怎么在Vitis加速设计中为Kernel创建面积约束
Alveo系列开发板上的平台其实是一个DFX设计的静态部分,在Vitis 统一软件平台中使用Alveo系列开发板设计加速Kernel, 最终这些Kernel的逻辑会在分布在DFX设计的动态区域。
本篇将介绍如何为Kernel的逻辑做floorplan(画Pblock),人为控制Kernel逻辑的布局。
我们以经典Example design“Vector Addition” 为例:
1. 打开Vitis 2020.2,创建新的 Application Project
File -》 New -》 Application project
2. 选择xilinx_u200_qdma_201910_1平台 (本篇讨论的方法不局限于某个具体平台)
3. 选择打开Example Design “Vector Addition”
4. 对Hardware Flow 在Link阶段设置 “-R2”,然后Build
此处report level 选择-R2:VPL(Vitis Platform link) 过程输出更多中间文件, 后续我们会用到画Kernel Pblock所需要的opt.dcp
5. 不用等到生成xclbin文件,VPL完成opt_design步骤之后我们就能看到XX_opt.dcp 文件。
XX_opt .dcp 所在目录及文件名:
vitis_pblock_u200/vadd_test_system_hw_link/Hardware/binary_container_1.build/link/vivado/vpl/prj/prj.runs/impl_1
pfm_top_wrapper_opt.dcp
6. 把这个XX_opt.dcp拷贝到另外的目录,并用Vivado打开这个dcp 文件
7. 查看已有的Pblock。主菜单 Window -》 Physical Constraints
在这个视图可以看到平台已经为动态区域在各个SLR中设置了相应的Pblock, 而且需要注意的是,设计中已有的Pblock是有层级关系的
例如:pblock_dynamic_region 包含三个下级pblock:
pblock_dynamic_SLR0,
pblock_dynamic_SLR1,
pblock_dynamic_SLR2,
提醒:不同平台SLR的数目也可能是不同的。 不同平台中自带pblock的名字有差异是正常的。 需要用户自己观察。
为Kernel模块生成的Pblock应该是pblock_dynamic_SLR0 这一级Pblock 的子模块, 工具支持把同一个Kernel的不同部分放置到多个SLR中,用户需要保证跨SLR路径的时序。
8. 为Kernel模块画Pblock
在这里尝试把Kernel 放置在pblock_dynamic_SLR0所属的中心区域
《1》。 在Vivado的Netlist View中选中Kernel 模块
例子中的模块名是 pfm_top_i/dynamic_region/krnl_vadd_1
《2》。 可以在Cells properties 窗口看到这个模块当前所属的Pblock是pblock_dynamic_region
《3》。 点击Device 视图中的“Draw Pblock” 按钮, 在Device视图上原有pblock_dynamic_SLR0的范围内画一个方框,新画的Pblock所覆盖面积要被原Pblock完全包含。 画完之后还可以选中Pblock微调Pblock的边界,同时为了不影响原来Pblock的结构,在TCL CONSOLE中用以下命令把新Pblock的Parent Pblock设置成pblock_dynamic_SLR0:
set_property PARENT pblock_dynamic_SLR0 [get_pblocks pblock_krnl_vadd_1]
《4》。 再看Kernel 模块的Pblock属性,已经变为pblock_krnl_vadd_1
《5》 在TCL CONSOLE中会打印出了画pblock相应的约束,我们可以将这些约束拷贝到一个新的tcl文件中保存。
(在这里保存到kernel_pblock.tcl)
《6》 看下更新的Pblock结构,新生成的pblock_krnl_vadd_1 是pblock_dynamic_SLR0的Child Pblock
《7》 继续在TCL CONSOLE执行 place_design 命令完成布局
理论上这一步可以跳过,如果你确信你画的Pblock没有问题的话。
《8》 完成place_design之后,可以观察一下Kernel 的资源在Device 上的实际分布情况
可以看到Kernel的逻辑全部都分布在刚才所画的Pblock 区域内
9. 在Vitis的link阶段做以下设置,使之前保存的画Pblock的命令在VPL(Vitis Platform link) 的place_design步骤执行之前生效
--vivado.prop run.impl_1.STEPS.PLACE_DESIGN.TCL.PRE=XX/kernel_pblock.tcl
10. 重新build Vitis 的Hardware flow, 之前加入的命令就会生效。
总结: 这就是一个简单的为Kernel逻辑创建面积约束(Pblock)的过程, 实际用户也可以为Kernel的子模块创建Pblock,这方面工具没有限制
编辑:jq
-
Xilinx
+关注
关注
70文章
2119浏览量
119368 -
TCL
+关注
关注
10文章
1657浏览量
87932 -
DFx
+关注
关注
0文章
35浏览量
10367
原文标题:开发者分享 | 如何在Vitis加速设计中为Kernel创建面积约束
文章出处:【微信号:gh_2d1c7e2d540e,微信公众号:XILINX开发者社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Vitis2023.2使用之—— updata to Vitis Unified IDE
Vitis2023.2使用之—— classic Vitis IDE
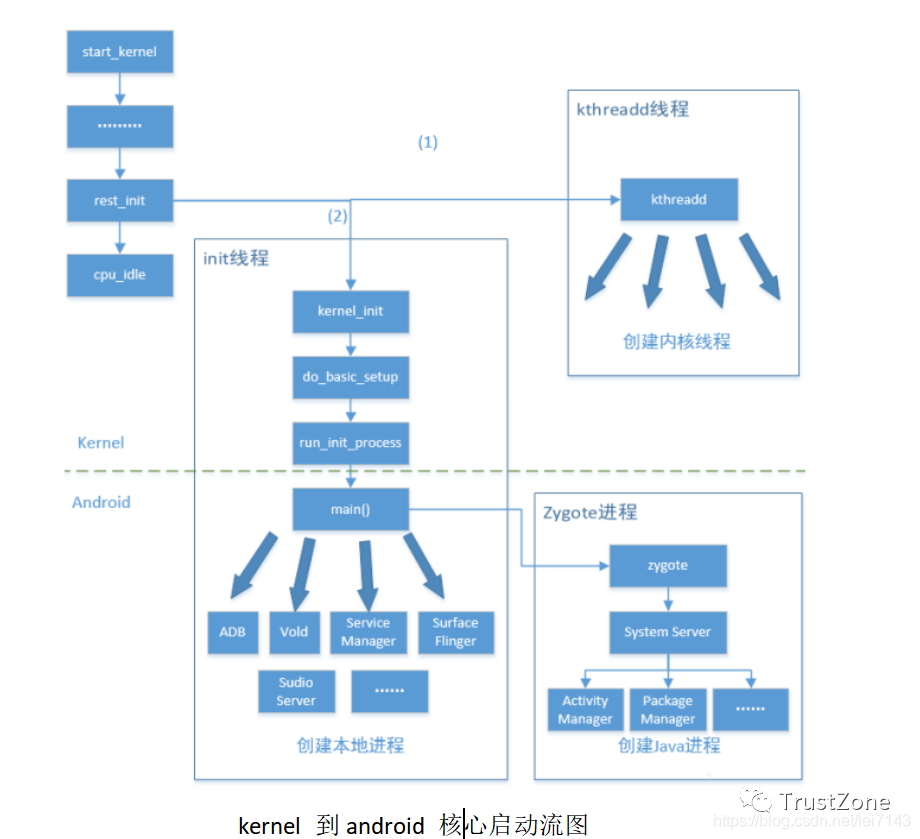
kernel到android核心启动过程
Vitis加速库:广泛且性能优化的开源库

【KV260视觉入门套件试用体验】KV260系列之Petalinux镜像+Resnet 50探索
【KV260视觉入门套件试用体验】Vitis AI 构建开发环境,并使用inspector检查模型
【KV260视觉入门套件试用体验】硬件加速之—使用PL加速矩阵乘法运算(Vitis HLS)
【KV260视觉入门套件试用体验】Vitis-AI加速的YOLOX视频目标检测示例体验和原理解析

【KV260视觉入门套件试用体验】部署DPU镜像并运行Vitis AI图像分类示例程序
【KV260视觉入门套件试用体验】Vitis AI 初次体验
【KV260视觉入门套件试用体验】部署vitis-ai环境以及测试demo
【KV260视觉入门套件试用体验】+02.开发环境安装Vitis/Vivado(zmj)
创建约束随机测试目标






 工商网监
工商网监
评论