 解析丰田L4级自动驾驶计算平台
解析丰田L4级自动驾驶计算平台
2021年4月,丰田汽车在日本市场推出丰田新款Mirai和雷克萨斯新款LS,新车配备Advanced Drive系统,该系统具备L2级自动驾驶技术。前者起售价格为860万日元(约合人民币51.5万元),后者起售价格为1794万日元(约合人民币107.5万元),如果是奔驰S级,这个价格不算高,但对雷克萨斯来说,这个价格是很高的。
说是L2级自动驾驶,实际比特斯拉的FSD要高出一大截,称L4丝毫不过分。之前本田曾经推出全球第一台L3车,实际是只生产100辆,只租不卖。只有丰田的才是真正量产车,不过丰田的价格也是够高的了,销量肯定不高,我想丰田应该非常清楚这一点。估计一年销量只有几千辆,甚至是几百辆,这样一来反而是好事,丰田可以使用非量产的半导体元件。
很多人会质疑夸大了丰田的L2,但仔细研究后就会发现,丰田的L2就是L4级自动驾驶,或者说丰田的硬件系统已经具备了L4级自动驾驶的能力和需求。众所周知L4与L3最大差别是L4能做到Fail-Operation,即具备两套完全不同的自动驾驶运算系统,一套作为主系统失效时的备份,在主系统失效时,仍能保持自动驾驶。L3则是Fail-Safety,系统失效时,人工接手,即失效时还要保持安全。像特斯拉或英伟达之类的,设置两个完全相同的主芯片只是提高算力,而不能做后备,既然是主系统已经失效,那么只有与主系统完全不同的系统才是真正的后备,才能真正做到Fail-Operation。
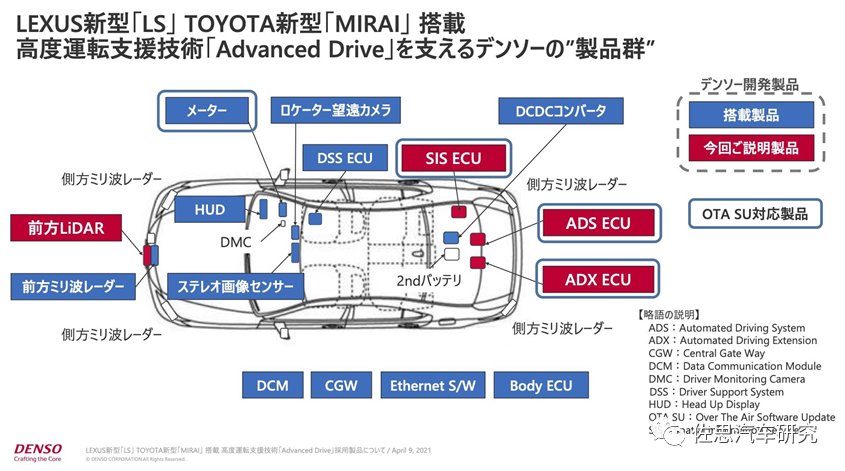
丰田的自动驾驶系统如上图,不仅计算系统有后备,电源系统也考虑到了,增加了第二块电池系统。主系统即ADS ECU,后备为ADX。两套系统同时工作,ADS负责绝大部分事物,保证基本安全,ADX负责锦上添花,让车不仅安全也具备智能。
这一套大约增加了66万日元硬件成本,也就是大约4万人民币的成本,未来或许丰田车可以选装,选装价格估计得20万人民币。加上雷克萨斯LS500H本来就标配的双目系统,构成完整的L4级自动驾驶。这一套系统中前向主激光雷达成本估计最高,大约1-1.5万人民币,两个侧向激光雷达合计大约5-8千人民币,3个ECU估计要1.2-1.4万人民币。软件成本无法估算,要看多少销量了。
传感器方面,主前向激光雷达由电装开发,电装与法雷奥Scala的设计如出一辙,只是巧妙地将单向变双向。同时电装可能是二代Scala的水准,也是16线设计,但也有可能更高,32线的设计。侧向则是大陆汽车的HFL-110 Flash激光雷达。核心的双目系统也是电装开发的。
毫米波雷达还是要的,总共有5个毫米波雷达,都由电装开发并生产,丰田供应链尽量垂直化,能自己做的部件都要自己做,不仅能保证部件性价比极高,也能快速迭代产品,还能保证供应链稳定度。欧美和中国厂家则是能对外采购的尽量对外采购。
ADS使用高等级车规元件,使用传统非深度学习算法也就是可确定性可解释性的算法。ADX以深度学习算法为主,但深度学习不具备确定性和可解释性,因此永远无法通过功能安全认证,但要车辆智能化而不是仅仅保持安全,深度学习必不可少。ADX系统都能胜任90%的自动驾驶任务,但不能保证100%安全,而ADS是保证安全,两套系统联用,既能有智能,也能在主系统失效后依旧正常运行自动驾驶,当然这个自动驾驶的时间段不能太长。这就是丰田与大多数厂家的不同,丰田更注重安全,其他厂家更注重智能。
ADS里丰田使用瑞萨的主SoC,ADX里是英伟达的Xavier做主芯片。
为什么用瑞萨的主SoC,首先是瑞萨是传统车规芯片大厂,对车规和安全更重视,其次是瑞萨与丰田关系紧密,瑞萨的自动驾驶用芯片就是和丰田联合开发的。

上表为瑞萨的股东列表,丰田控股的电装(曾经是丰田的电子与热交换事业部)是第二大股东,最初电装持股只有0.5%,后来陆续花费数十亿美元增持到8.95%。丰田汽车持股2.92%。瑞萨的第一大股东是日本株式会社产业革新机构(Innovation Network Corporation of Japan, INCJ),这是日本政府与19家民营企业合资成立的投资公司,日本财务省占95.3%的股份,瑞萨可以算日本的半国营企业。那19家民营企业里也包括了丰田。早期INCJ持有瑞萨股份超过50%,后来将大约8%的股份都转让给了电装。在2017年,丰田、瑞萨和电装建立了自动驾驶合作联盟。
丰田自动驾驶ADS可能使用瑞萨最新的R-CAR V3U。有人会说,按照日程表,R-CAR V3U要到2023年才量产,这个量产指的是每月都超过1万片的规模。鉴于丰田自动驾驶系统的出货量和丰田与瑞萨之间的紧密合作关系,丰田自动驾驶ADS可能使用瑞萨的R-CAR V3U,在没有大规模量产前,每个月几百片的量还是能满足的。
顺便说一下,中国一汽红旗也决定使用R-CAR V3U做自动驾驶系统主芯片,但是要到2023年下半年才量产。大众集团的自动驾驶系统也很有可能使用R-CAR V3U,因为双方在座舱领域已经紧密合作,德国大众和上汽大众都与瑞萨建立了联合实验室。
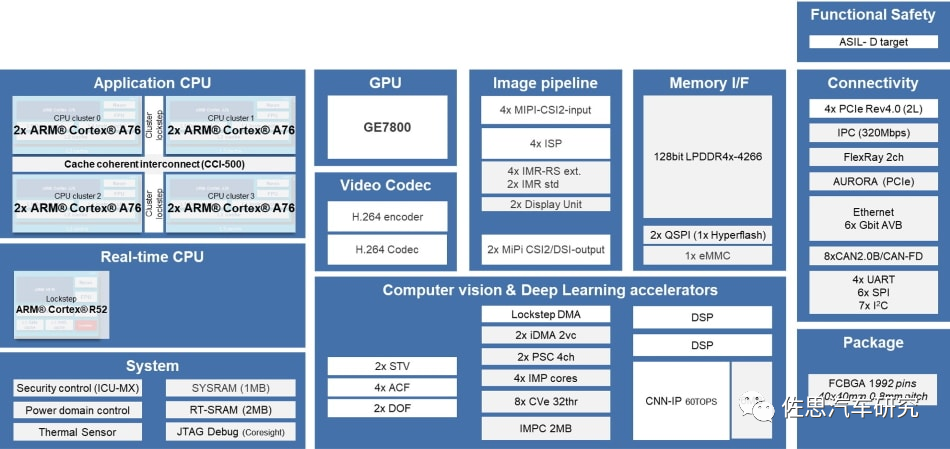
V3U内部框架如上图,采用8核A76设计,但也不是像特斯拉那样简单堆12个A72,它使用了ARM的Corelink CCI-500,即Cache一致性互联。它提供处理器集群之间的完整Cache一致性,比如 Cortex-A76 和 Cortex-A55,而且可以实现 big.LITTLE 处理。它还可为其他的设备(如 Mali GPU、网络接口和加速器)提供 I/O 一致性。实时锁步CPU是ARM的R52,英伟达最新的1000TOPS芯片Atlan也是用了R52。
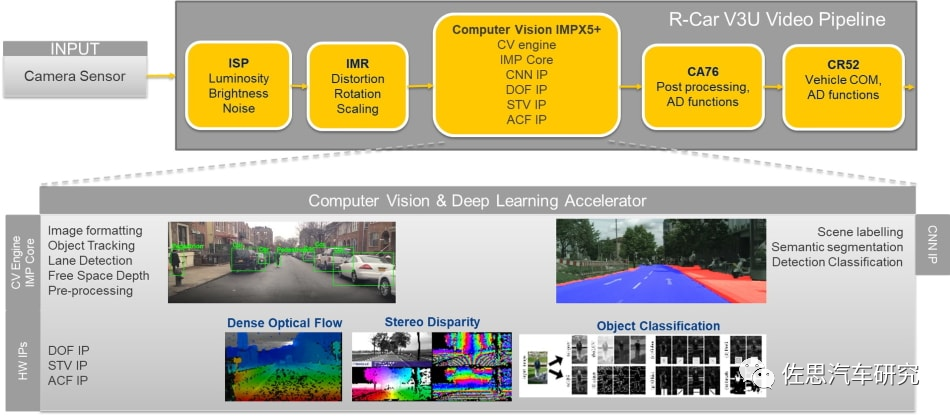
V3U视觉管线如上图,可以看到V3U有很多硬核计算机视觉模块,包括立体双目视差,稠密光流、CNN、DOF、STV、ACF等。功能方面包括图像格式化、目标追踪、车道检测、自由空间深度、场景标注、语义分割、检测分类等都具备,类似于Mobileye的全封闭算法了。
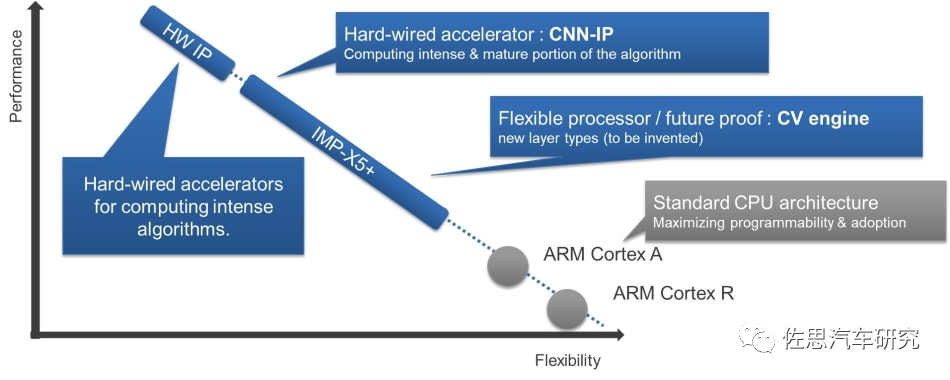
图像处理主要还是IMP-X5+,灵活性应该比Mobileye还是要高点。因为针对性比较强,也为了节约成本,降低功耗,瑞萨没有使用太昂贵的GPU,只是简单增加了一个低功耗GPU,即Imagination Technologies的PowerVR GE7400,1个着色器集群+32个ALU核心,算力只有38.4GFLOPS@600MHz。
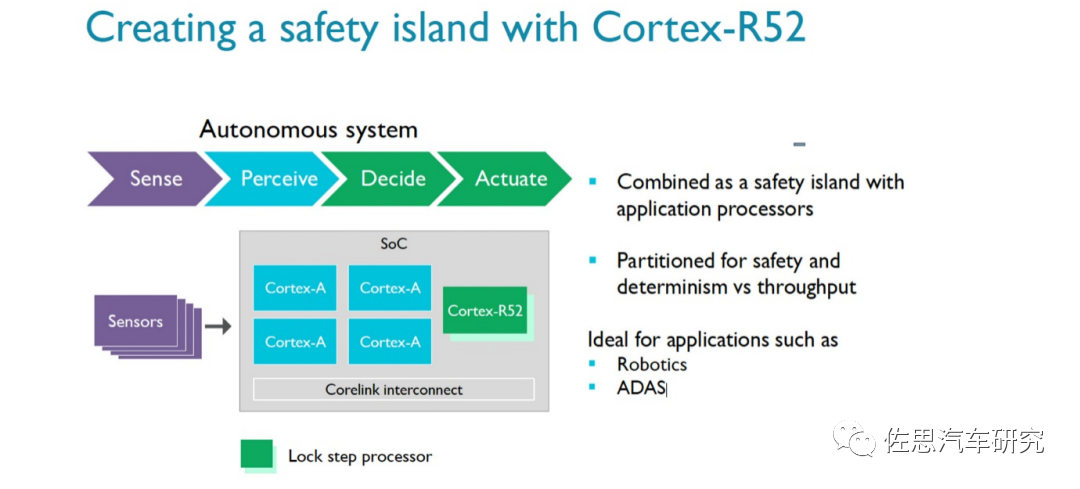
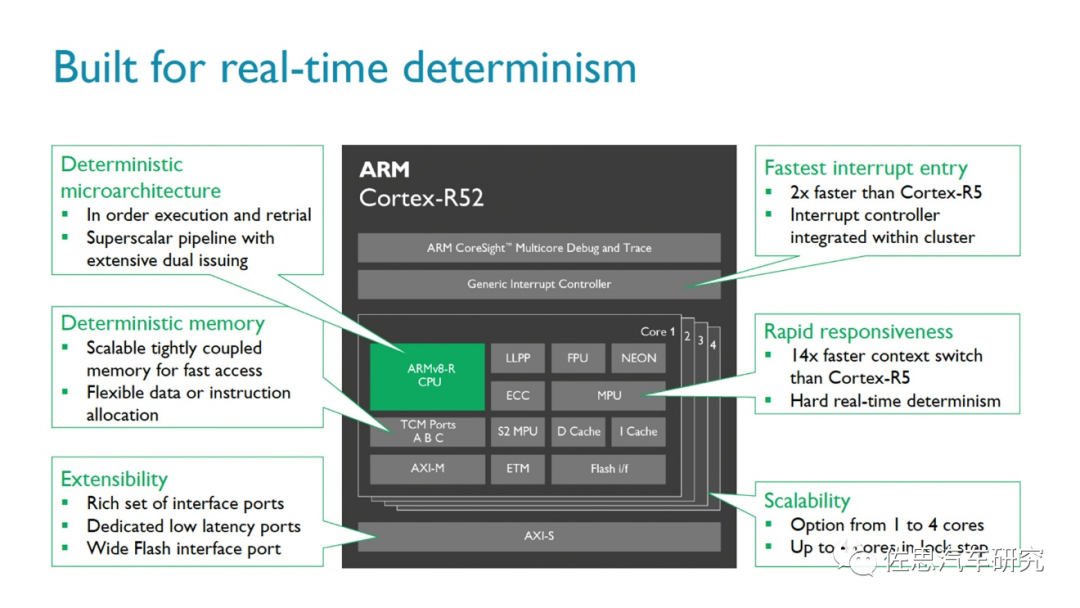
R52是ARM在2016年发布的专为自动驾驶安全市场供应的内核,Cortex-R52最高支持4核心锁步技术,相比Cortex-R5,有35%的性能提升,上下文切换(乱序)提高14倍,入口抢占提高2倍,支持硬件虚拟化技术。按照ARM的说法,简单的中控系统可直接用Cortex-R52,但是像工业机器人和ADAS(先进辅助驾驶)系统则建议配合Cortex-A、Mali GPU等提升整体运算。
另外,ARM Cortex-R52通过多项安全标准认证,包括有IEC 61508(工业)、ISO 26262(车用)、IEC 60601(医疗)、EN 50129(车用)以及RTCA DO-254(工业)等。2021年3月还推出了R52+架构。可以最高支持8个核心锁步。
R52包括三大功能
•软件隔离:通过硬件实现的软件隔离,意味着软件功能互不干扰。对于安全相关的任务,这也意味着需要认证的代码更少,从而节省了时间、成本和工作量。
•支持多个操作系统:借助虚拟化功能,开发人员能够在单个CPU内,使用多个操作系统来整合应用。这样可以简化功能的添加,而无需增加电子控制单元的数量。
•实时性能:Cortex-R52+的高性能多核集群可为确定性系统提供实时响应能力,且在所有Cortex-R产品中产生的延迟最低。
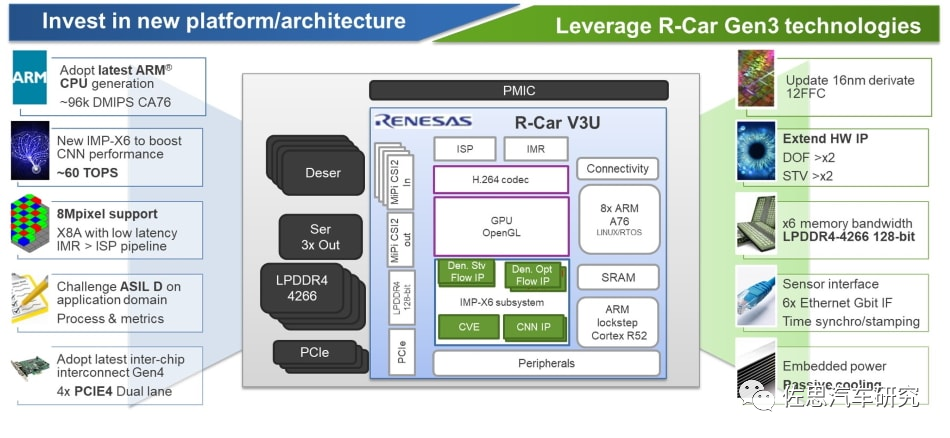
考虑到成本因素,瑞萨没有使用尖端的7纳米,而是12纳米工艺,并且是从原瑞萨R-CAR H3的16纳米FinFET工艺升级到12纳米FFC工艺,一次性支出很少。但是论到AI性能,丝毫不逊于那些5纳米芯片,瑞萨声称V3U达到了惊人的13.8TOPS/W的能效比,是顶配EyeQ6的6倍之多。
和奔驰一样,丰田从一开始就是以立体双目为自动驾驶的核心。支持立体双目的还有电装、博世、捷豹路虎、斯巴鲁、本田、德国大陆汽车、华为、大疆、铃木和亚马逊与福特投资的电动车品牌Rivian。瑞萨V3H和V3U里都有针对双目的硬核处理部分,英伟达的Xavier也有。
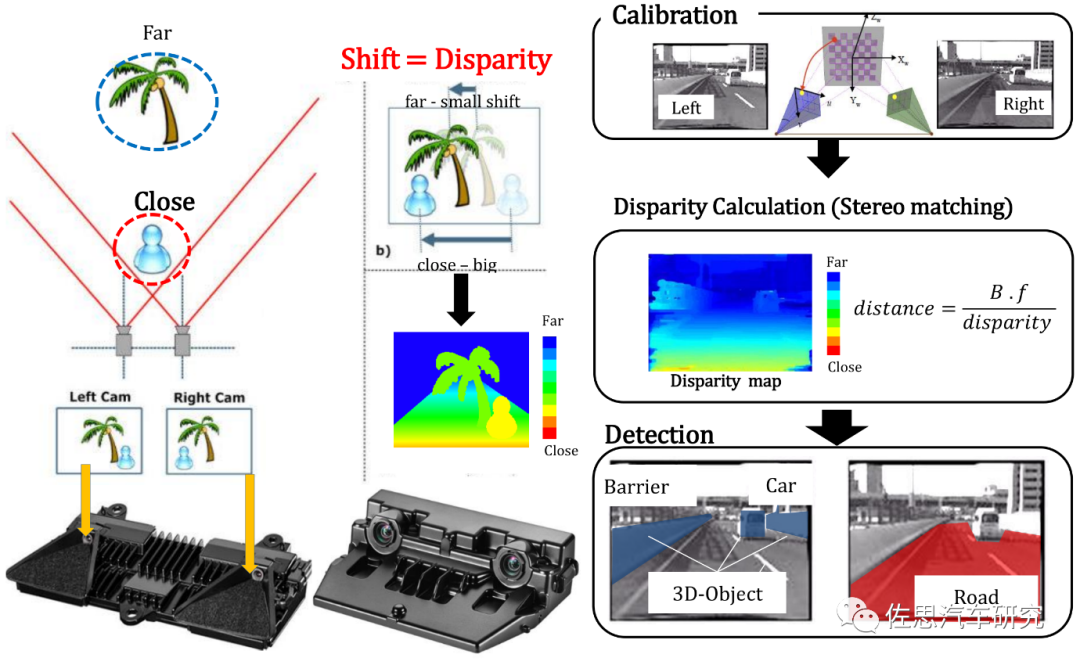
与单目三目的2D系统相比,立体双目最大的优势是无需识别目标也可以探测目标的3D信息,也更擅长目标的追踪与位置预测。单目和三目摄像头的致命缺陷就是目标识别(分类)和探测(Detection)是一体的,无法分割的。
必须先识别才能探测得知目标的信息,而深度学习的穷举法特性导致其肯定会出现漏检,也就是说3D模型有缺失,因为深度学习的认知范围来自其数据集,而数据集是有限的,不可能穷举所有类型,因此深度学习容易出现漏检而忽略前方障碍物,也就是说如果无法识别目标,系统会认为前方障碍物不存在,不做任何减速,特斯拉多次事故大多都是这个原因。
即使特斯拉的HW4.0(FSD Beta)算力再高也是L2,也是无法避免漏检的,并且FSD Beta版在识别与对于物体的警示功能方面仍有限,对于静态的物体、紧急驶出的车辆、建筑区域、较复杂的十字路口等无法进行辨别。单目三目系统的另一个缺点是静态目标反应要慢。
大部分基于立体双目的算法都是传统几何算法,不是深度学习算法,具备确定性和可解释性。目前提到的自动驾驶算力都是针对深度学习的卷积的,算力再高也与安全无关。针对立体双目,最大运算量在于立体匹配,一般都用硬核完成。
立体双目的缺点是标定困难,需要长时间摸索。算法人才奇缺,生态系统单薄,不像单目三目系统,免费资源无处不在,立体双目需要从内部培养人才,这个过程长达10年以上。这不是特斯拉等厂家能胜任的。宝马都有些吃力,宝马也跟风奔驰用过双目,但效果很差,比单目三目还差,宝马最近基本放弃双目路线。
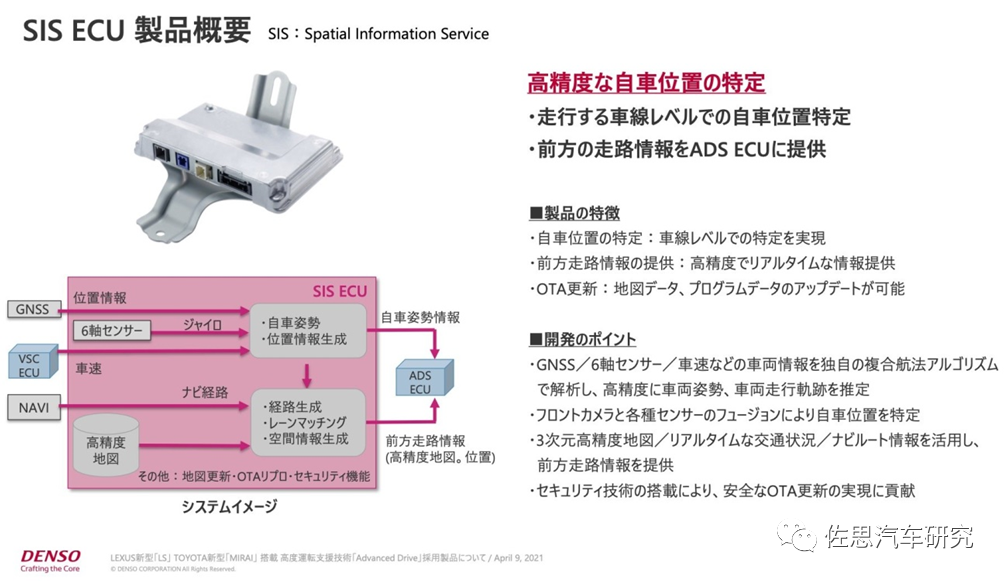
与大多数自动驾驶系统不同,丰田将定位系统特别点出,称为SIS ECU。
自动驾驶的定位有两种,一种称之为绝对定位,不依赖任何参照物和任何先验信息,直接给出无人车相对地球坐标或者说WGS84坐标系,也就是坐标(B,L,H),其中B为纬度,L为经度,H为大地高即是到WGS-84椭球面的高度。
另一种是相对定位,即有参照物或先验信息的定位。有像Mobileye这样的视觉众包定位REM,视觉对光线变化很敏感,光线每时每刻都在变化,数据的一致性几乎不可能,逆光与背光完全不一样,某国产轿车逆光下ADAS系统几乎完全失效,因此准确度很低。
也有基于激光雷达先验信息的定位,准确度极高,但成本也极高,且不可能大范围(几百公里)使用。此外,相对定位无法与标准的高精度配合使用,两者的坐标系、数据格式、接口、时间轴完全不同,标准的传统的高精度地图必须有绝对定位。
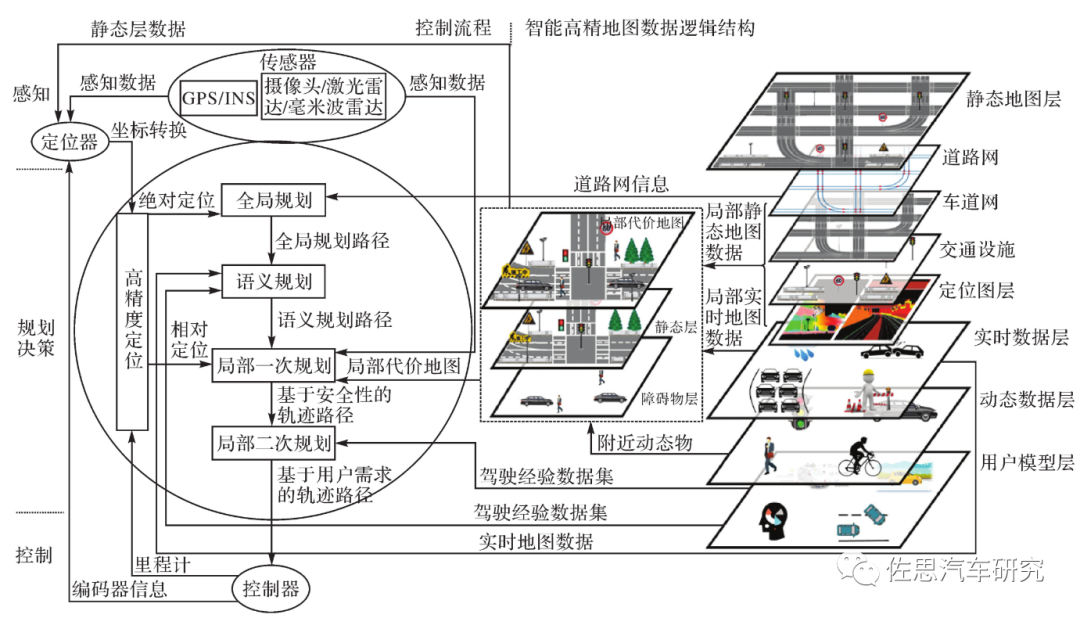
绝对定位是不可缺少的,特别是全局规划。而目前绝对定位只能用卫星定位,而卫星定位除了QZSS,其余都无法做到自动驾驶的车道级定位。这是L3/L4的瓶颈之一。
之所以说特斯拉是标准的L2级智能驾驶,也是因为特斯拉根本做不到车道级定位,目前全球唯一能做到车道级定位的是凯迪拉克的超级巡航,超级巡航使用了天宝的RTX服务,每年缴纳服务费才取得了车道级定位。
天宝的RTX全球跟踪基站网络在全球部署了120个左右的跟踪基站,对GNSS观测值进行实时跟踪和存贮,将GNSS观测值时发送给分别位于欧洲和美国的控制中心,控制中心对全星座精密卫星轨道、钟差和大气建模,得到全球精密定位改正数。全球精密位置改正数通过L波段卫星(天宝自己的卫星)或者网络的方式广播给服务授权的终端用户。
特斯拉里的定位只有一个GPS。GPS模块是NEO-M8L-01A-81,水平精度圆概率误差(CEP)为2.5米,有SBAS辅助下是1.5米,接收GPS/QZSS/GLONASS/北斗,CEP和RMS是GPS的定位准确度(俗称精度)单位,是误差概率单位。
就拿2.5M CEP说吧,意思是以2.5M为半径画圆,有50%的点能打在圆内,也就是说,GPS定位在2.5M精度的概率是50%,相应的RMS(66.7%)2DRMS(95%)。当然很多商家为了参数好看,只给出CEP。实际95%概率情况下是6米精度,有SBAS辅助95%概率是3.6米精度。已经远超一个车道了。冷启动26秒,热启动1秒,辅助启动3秒。内置简易6轴IMU,刷新频率仅20Hz,成本不会超过80美分。
日本的GPS是特殊的GPS,附加了QZSS。
早在1972 年,当时的日本电波研究所(现为信息与通信研究所) 就提出了准天顶卫星系统的概念,论证了这种系统很适合日本这样地处中纬度、国土狭长的国家;2002年11月1日正式成立了新卫星商业公司Advanced Space Business Corporation (ASBC),共有43家企业出资,三菱电机公司、 日立制作所和丰田汽车公司等7家企业持股占77%。
但是事情并不顺利,最后还是由日本政府内务省出面接管QZSS项目。日本政府接管后,在2010年9月11日,发射第一颗卫星Michibiki,2011年6月1日,正式提供导航服务。2017年6月1日,发射第二颗卫星,2017年8月10日,发射第三颗卫星,2017年10月10日,发射第四颗卫星。日本计划在2023年,将QZSS的导航卫星数量增加为7颗,届时将不再依赖美国GPS,即可提供位置信息。
2023年-2026年,不加任何地基增强的空间信号测距误差为2.6米,加上地基增强可做到0.8米左右。2027年-2036年,不加地基增强误差为1米,2036年以后,误差为0.3米。QZSS接收机上不需要增加任何硬件成本,只增加软件成本,苹果手机就支持QZSS。
QZSS廉价、高效、广播方式没有带宽的瓶颈,也没有延迟,是最适合自动驾驶的一种技术。缺点是日本国土狭长,7颗星覆盖率就可超过100%,对中美这样的大方块国家,恐怕得几十颗低轨道卫星。这种基础工作,恐怕最少要花数十年以上的时间才能决策批准并实施。
除了绝对定位,丰田也考虑了相对定位,为此增加了一颗远距离摄像头,即立体双目之上的那个摄像头,主要用来检测车道线,配合高精度地图的先验信息,实现相对车道级定位。
IMU方面,丰田可能使用了TDK专为自动驾驶开发的IMU,即IAM-20685或者是IAM-20680HP,这是单独外置的IMU,精度颇高,IAM-20685达到ASIL-B级标准,陀螺仪量程±2949bps,精确度±300bps。加速度计量程从±16g, ±32g到±65g,精确度±8g, ±20g和 ±36g,价格自然不低,IAM-20680HP大约10美元(5千片起),IAM-20658大约15美元,跟特斯拉的整个GPS模块价格都差不多,而这仅仅是一个IMU。
中美日三国自动驾驶竞赛,日本一向追求产品高完成度,给人感觉落后不少,不过谁能笑到最后?让时间来回答吧。
编辑:jq
-
IMU
+关注
关注
5文章
259浏览量
45285 -
ACF
+关注
关注
1文章
24浏览量
10587 -
自动驾驶
+关注
关注
773文章
12992浏览量
163114
原文标题:丰田L4级自动驾驶计算平台剖析
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
2025量产L4 RoboTaxi,滴滴自动驾驶再进一步
未来已来,多传感器融合感知是自动驾驶破局的关键
NVIDIA和昊铂宣布双方将合作量产L4级自动驾驶汽车

文远知行与联想车计算战略合作,推进自动驾驶商业化落地
文远知行与联想车计算共同推出L4级别自动驾驶解决方案
小马智行第六代自动驾驶车型在京开启全无人载客测试
自动驾驶产业链爆发前夜?多家车企宣布已获得L3级自动驾驶路测牌照

明年L3/L4自动驾驶量产车可以上路!事故责任划分也有定论了
进博会亮点 小马智行与丰田合作首款纯电自动驾驶出租车概念车亮相

小马智行与丰田合作支持未来自动驾驶出租车前装量产和规模化部署
百度Apollo自动驾驶平台及自动驾驶等级

自动驾驶计算平台
自动驾驶开发平台





 工商网监
工商网监
评论