 90后科学家杜韬实现“海星”机器人
90后科学家杜韬实现“海星”机器人
18 小时就能创建一台机器人?
来自江苏的 90 后科学家杜韬实现了,这是一款海星机器人(下称 “海星”),外形酷似真实的海星。
他告诉 DeepTech,此前很多海底机器人因为外形奇异,在水下执行探测任务时,往往会吓到水底生物,而本次机器人的仿生造型,可以解决上述难题。
其中,杜韬和合作者们提出了快速制作和控制 “海星” 的软件和硬件实验平台。
他们提出的硬件设以及利用 C++ 和 Python 开发的机器学习算法系统,能在 18 小时内完成从制备、到仿真、再到系统识别和轨迹优化 “海星” 的全过程。
当 “海星” 在水箱中进行测试时,相关实际性能数据会反馈到计算机模型中,并可得到进一步优化。以这种方式来回移动,能在几个小时内生产出功能性产品。
此外,仅使用单个低功率执行器,它就能实现移动,通过四个腿中的肌腱运动,可给其带来交替挤压和腿部释放,从而实现安静且高效的游动。
“海星” 是本次工作核心算法的硬件平台,目前它主要由硅胶泡沫(silicone foam)、单个低功率电机、四条腿以及相连的肌腱组成。
“海星”前肢肌腱上连接了一个低功率电机,这些肌腱可以被挤压和释放,从而使机器人可以安静地移动并有效地在水中游动。
制备 “海星” 时,先利用 CAD 设计软件 OnShape 设计 “海星” 身体,随后制作一个模具,将硅胶泡沫灌注到模具中,定型后即得到 “海星” 身体。
在水中时,硅胶泡沫具备较好的弹性和浮力,使用本次研究中的新算法进行优化后,“海星” 在水中的移动速度,比手工调试的控制器快四倍。
“海星” 每条腿的内部有一根高强度鱼线,你可能会好奇鱼线是如何植入 “海星” 的,具体来说首先要从每条腿的脚尖,朝着舵机方向插入一根中空的导管,导管中放有鱼线,将导管抽出后,鱼线即可被运输到 “海星” 体内。
进去后,鱼线一端固定在 “海星” 脚尖,另一端汇集到 “海星” 背上的舵机。舵机转动时,可以同时收放四根鱼线,从而同时收缩或伸直它的四条腿。
“海星” 飞速游动是头等目标
在 “海星” 的固液耦合上,杜韬采用一种经验公式,去建模它和水流之间的耦合,并使用可微仿真的工具,去微调建模时的参数。
研究主要目的,是让 “海星” 游得越快越好。概括来说,该任务的完成主要分为两大步骤。
第一步是要对系统有较好的建模,即要了解机器人的基本信息,因此他先后测出机器人的体积、重量、密度和杨氏模量(衡量材料软硬的单位)的大致范围,用来对海星进行建模。
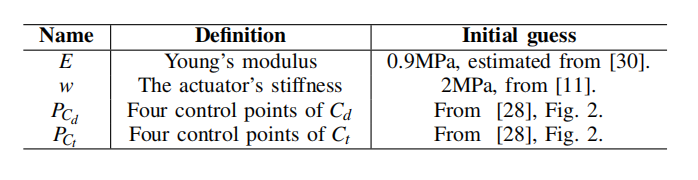
图 | 模型参数(来源:受访者)
具体来讲,是让 “海星” 在实验中执行简单的控制信号,并和水流做一些交互。获得实验数据后,使用可微仿真工具,让仿真中的 “海星” 物理模型再去执行同样的控制信号。
通过分别观察仿真环境、和实验环境中的运动轨迹,本次算法能不断调整建模参数,从而让物理系统建模更加准确。
可微仿真工具的好处在于,不仅能正向模拟出“海星”的运动轨迹,也能计算它和真机实验中轨迹的误差值,并反向传导误差对于机器人参数的梯度。充分利用这些梯度信息就可以更快速、更高效地调整建模参数。
第二步是在建模的基础上,求解轨迹优化来提出新的控制信号。研究到这里,本该按下结束键,但杜韬打算多次迭代,借此形成循环从而提升模型猜测。
可让机器人不断迭代的算法
详细来说,他的算法通过改进对模型参数的估计,可做出新的控制信号,并部署在真机实验上。此时 “海星” 就能执行新的通讯信号,如此便可产出更多数据用来进一步改善对于模型的猜测和评估。
他告诉 DeepTech,该研究的重点在于算法,“海星” 只是验证算法成功与否的工具。相比传统方法,最精彩的部分在于算法的逐步迭代过程。
首次迭代时,即使使用人工多次调试后的控制信号,“海星” 拼命游动腿部也只能前进一小段距离,哪怕收集到的数据再多、在仿真中把数据拟合得再好,也只是拟合了它在低速环境中的模型。
这在获得可让 “海星” 高速运动的模型方面,几乎没有任何帮助。因为,“海星” 在低水速和高水速情况下的运动状态、以及和水流的交互都不一样。
而这样迭代几次后,“海星” 就能获得更快的运动方法,这时便可搜集高水速时的数据,从而修正模型、让其具备指挥机器人快速游动的能力。
该研究的痛点在于:相比陆地机器人,由于水流、海水盐度和浮力等变量,水下机器人更难设计,复杂的水运动动力、及其快速 “破坏” 电机系统的威力,导致科学家们往往需要耗时几周、甚至更长时间才能制备出水下机器人。
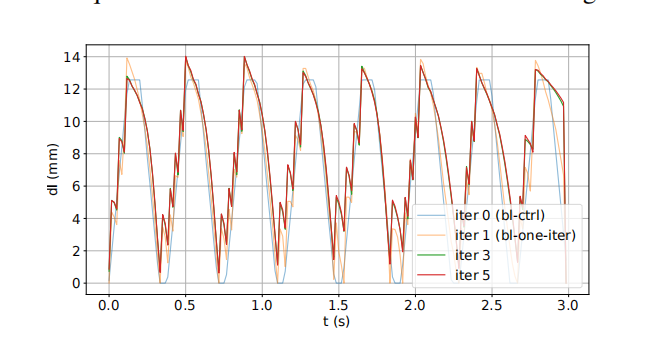
图 | 相关数据(来源:受访者)
由于每一次在真机实验中收集到的数据都十分珍贵,工程师们迫切需要好的算法来充分挖掘出这些数据里最有价值的信息。
无论在平静水流、还是起伏波浪中,水下机器人与周围流体之间的被动相互作用,都比陆地机器人在稳定地形上行走要复杂得多,因此非常难以创建水下机器人的控制系统。
另外柔性机器人往往有成千上万的自由度,运动上难以被控制。而杜韬研发的算法,正是该问题的 “克星”。
一言以蔽之,这项工作旨在通过有效仿真和真实实验的混合循环,来缩小机器人和现实的差距。
“海星” 未来:星星般闪耀
与刚性机器人相比,“海星” 更安全、更坚固、也更灵活。对于需要在狭窄空间中移动的环境,“海星” 的弹性,让它能从碰撞中恢复。在相关场景中,更多学者们也开始转向柔性机器人。
目前,相关论文已发表在 IEEE RA-L 期刊上,标题为《基于可微仿真的水下柔性机器人建模与控制》Underwater Soft Robot Modeling and Control with Differentiable Simulation。在本周的机器人国际会议 RoboSoft 2021 会议上,杜韬还对“海星”做了线上展示。
谈及未来应用,杜韬告诉 DeepTech,尽管他们只在海星上展示了他们的迭代算法,他和他的合作者都认为这个算法可以被广泛应用在其他机器人的设计和控制上。
“系统识别和求解控制,是机器人研究中非常关键的步骤,而求解这两个步骤的过程在不少机器人上都是高度耦合的,” 杜韬表示,“我们期待着今后在更多类型的机器人,比如设计出混合刚性关节和柔性肌肉的新型水下机器人,从而去复制‘海星’的成功。”
他补充称,本次之所以选择海星设计,是因为其动作简单而优雅,并且通过挤压和释放其腿部来实现向前运动。
目前,杜韬是麻省理工学院(MIT)CSAIL实验室的博士生。本次研究中,他和同样来自 CSAIL 的博士后 Josie Hughes 作为共同第一作者,主导了“海星”的软硬件开发。
杜韬是江苏人,本科毕业于清华大学软件学院,后在斯坦福大学计算机系获得硕士学位。2015 年,他来到 MIT CSAIL 实验室攻读博士学位,并将于今年毕业,其研究方向包括计算机图形学、机器人、机器学习等。
业内知名机器人大牛——CSAIL 实验室主任丹妮拉·罗斯(Daniela Rus)教授,也是该论文的作者,作为世界权威的机器人专家,罗斯领导了多项柔性机器人和水下机器人的著名研究。
对于本次研究她表示,相比传统刚性机器人,在和人交互时柔性机器人更安全,在复杂的未知环境中,后者也更加健壮和灵活。而本次“海星”机器人和海洋生物共处时不会惊扰到它们,如此便可在探测海洋的同时,保护好海洋精灵们。
未来,通过利用更快速的设计和控制算法,他们将设计更多样的仿生柔性机器鱼,来作为观测站去近距离观察海洋生物。
原文标题:江苏90后科学家联合研发“海星”机器人,有望用于海底探测!由MIT CSAIL出品,数小时内完成制备 | 专访
文章出处:【微信公众号:DeepTech深科技】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
机器人
+关注
关注
206文章
26968浏览量
201287
原文标题:江苏90后科学家联合研发“海星”机器人,有望用于海底探测!由MIT CSAIL出品,数小时内完成制备 | 专访
文章出处:【微信号:deeptechchina,微信公众号:deeptechchina】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
谷歌DeepMind科学家欲建AI初创公司
科学家研发仿生小鼠机器人,可用于灾后救援和探测检修等领域

【开源项目】Emo:基于树莓派 4B DIY 能笑会动的桌面机器人
LabVIEW的六轴工业机器人运动控制系统
ai人工智能机器人
基于Matlab和VR技术的移动机器人建模及仿真
华为辟谣3.2万名科学家移籍

profinet转ethernet网关连接发那科机器人配置案例
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
踏歌智行创始人、首席科学家余贵珍教授登榜“2023科创家”

如何快速地让机器人投入生产
浅谈儿童陪护机器人
科学家用银线团搭建「纳米线网络」,触电就像大脑一样运作





 工商网监
工商网监
评论