 激光雷达中三角测距与ToF测距的原理及比较
激光雷达中三角测距与ToF测距的原理及比较
当研发人员对机器人搭载的激光雷达进行技术选型时,往往会发现同样是机械式单线雷达,不同厂家的不同型号在外观、性能参数和价格区间上差别巨大,容易产生疑惑,不确定哪种更适合自己的使用场景。
这主要是由于目前市场上机械式激光雷达使用了不同的测距原理,主要可分为三角测距和ToF测距两类,使得雷达整体设计在尺寸、性能和成本上有较大差异。
接下来将为大家详细介绍两类测距方式的技术原理,帮助研发人员加深理解,从而选择更适合自身场景的激光雷达方案。首先来看三角测距激光雷达。
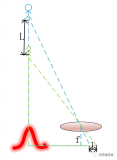
这种测距方式的基本原理如图1所示。雷达测距模块向外发射红外激光,入射到被测物体上之后,部分散射光经接收透镜汇聚到线阵图像传感器(CCD/CMOS)上成像。
由图中的几何关系可知,位于不同距离的物体,出射激光形成的光斑在线阵上成像的位置亦不相同;另一方面,测距模块的内部结构固定不变,接收透镜的焦距f,以及发射光路光轴与接收透镜主光轴之间的偏移(即基线距离)L这两项参数都是已知的。根据三角形的相似关系,即可计算出物体的距离D如下:
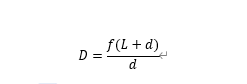
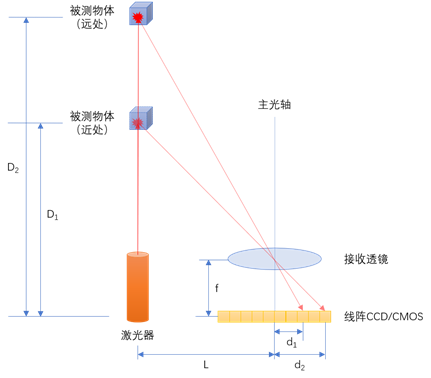
图1 三角测距基本原理
以上原理介绍为最简化的情况。在实际应用中,为了提高距离分辨率,以及充分利用线阵图像传感器的像素资源,通常将发射光路光轴与接收透镜主光轴布置为呈一定斜角(而非图示中的平行关系),但相似三角形的基本原理并无变化。
三角测距的原理决定了使用这种测距方式的激光雷达的一些技术特点。
首先来看测量距离,对于三角测距激光雷达来说,这个参数和距离分辨率是紧密联系的。所谓距离分辨率,就是对不同距离目标的区分能力;换句话说,当目标的距离发生变化时,变化量达到多大才能使雷达输出的距离值发生变化,相当于用尺子量长度时,使用的尺子的最小刻度是多少,三角测距的一大特点是这把“尺子”的刻度是不均匀的。
由图1易知,对于比较近的距离区间,目标距离的变化会引起成像点位置的显著变化;而当目标位于远处时,即便距离发生很大的变化,体现到成像点上只会产生一点点移动,也就是说,三角测距的距离分辨率会随着距离的变远而急速下降。这就限制了三角测距的最大实用测量距离,超出了这个距离后,分辨率的下降将使得测量结果失去意义。
其次是测量速率。机械式单线激光雷达在旋转扫描的同时对不同方向上的目标进行测距,因此测量速率直接决定了雷达能否以更快的速率扫描(对应更高的帧率),以及在完成一周扫描时能否输出更多的测量点(对应更高的角度分辨率)。
为了达到一定的距离分辨率,三角测距激光雷达往往都会使用较高分辨率的线阵图像传感器,通常具有数千个像素点,每次测距时需要将这些像素点的灰度值读出并交给DSP处理,整个读出和处理的过程需要耗费一定时间,从而限制了三角测距激光雷达的数据速率。
说完三角测距之后,接着再看ToF测距。ToF是Time of Flight的缩写,也即飞行时间测距法,其基本原理如图2所示:
开始测距时,脉冲驱动电路驱动激光器发射一个持续时间极短但瞬时功率非常高的光脉冲,同时计时单元启动计时;
光脉冲经发射光路出射后,到达被测物体的表面并向各方向散射。测距模块的接收光路收到部分散射光能量,通过光电器件转化为光电流,输送给回波信号处理电路;
回波信号处理电路将光电流转化为电压信号,经过一级或数级放大并调理后,得到一个回波信号对应的电脉冲,用于触发计时单元停止计时;
此时,计时单元记录的时间间隔就代表了激光脉冲从发射到返回的全程所用的时间,使用这个时间值乘以光速并除以2,即可得到测距单元与被测目标之间的距离值。
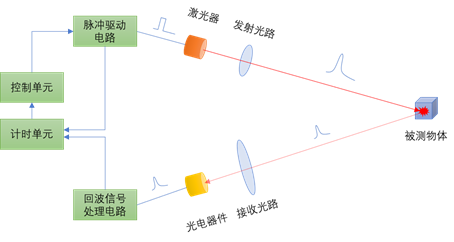
图2 ToF测距基本原理
ToF测距的原理很容易理解,但具体工程实现时有不少技术难点需要解决,这主要是由于ToF测距的工作条件比较极端,非常大(脉冲发射峰值)、非常弱(脉冲回波)和非常快(纳秒/皮秒级别)的信号,这就对整个电路的驱动能力、带宽和噪声抑制水平提出了很高的要求。但它的优势在于,只要解决了上述这些问题,整个测距系统可以实现非常高的性能。
从测量距离来看,由于ToF测距发射的是持续时间极短的激光脉冲,因此在符合人眼安全要求的前提下,可以把光脉冲的瞬时功率提到很高的水平,从而能够探测到更远距离的目标。
不同于三角测距基于几何相似关系的测量原理,ToF通过测量光脉冲的飞行时间来计算目标距离,而计时的精度不会因距离变远而发生改变,这样在整个量程内,ToF测距的距离分辨率都不会有实质性的变化。最后,ToF测距处理的都是高速脉冲信号,由此而来的好处是整个测量过程耗时极短,可以很轻松地做到非常高的测量频率。
说完三角测距和ToF测距的工作原理后,接下来很自然的一个问题是,哪种类型的单线激光雷达更具优势?答案是要根据每种雷达的特点,结合具体的使用场景来看。
三角测距激光雷达的优势主要体现在成本上,因其设计方案成熟,批量生产时成本可以降到很低的水平,但由于其在实际使用过程中并不稳定,导致其在工业领域的应用受到很大限制。
此外,因为三角测距使用并列布置的平行轴光路,雷达的外观可以做得比较低矮,能够用于机体高度受限的场合;这些优势,结合三角测距近距离测量精度较高的特点,使得三角测距激光雷达非常适合于消费级产品上使用,近年来逐渐普及的扫地机器人就是一个很好的例子,只要是具备导航功能的型号,几乎清一色地使用了三角测距激光雷达作为主传感器方案。对于服务机器人类的产品,当活动场景不大,或者需要在近距离补盲避障时,三角测距激光雷达亦有应用案例。
ToF测距激光雷达的系统设计,相比三角测距雷达更复杂,因此成本会高一些,但由此带来的性能提升也是显而易见的,目前有不少团队的在研ToF方案,可在保持ToF测距工业级稳定性和高性能的基础上,将整机成本降到较低的水平,从而有潜力替代三角测距激光雷达在消费领域的应用。
市面上ToF单线激光雷达的主流产品,其最大测量距离(针对70%反射率目标)通常10米起步,数据速率达到15 KHz或更高,扫描频率从15 Hz到40 Hz不等,且不少型号都可以在室外使用,因此环境适应性更好,非常适合于活动空间大、移动速度高、需要在较强环境光(例如室外)工作的移动平台。目前,ToF测距激光雷达在服务机器人、AGV/AMR、低速物流车都有普遍的应用。此外,在一些静态安装的场合,例如工业安全防护、大屏互动、安防监控等领域,也常常能看到ToF测距激光雷达的使用。
编辑:lyn
-
传感器
+关注
关注
2517文章
47903浏览量
739449 -
激光雷达
+关注
关注
958文章
3619浏览量
186445 -
三角测距
+关注
关注
0文章
19浏览量
688
发布评论请先 登录
相关推荐
硅基片上激光雷达的测距原理

【核桃派1B 开发板试用体验】激光声纳双雷达对比测试
阐述基于激光三角测距法的激光雷达原理

基于激光三角测距法的激光雷达原理


下一代激光雷达要来了?近期多家厂商推出FMCW技术方案

浅析激光雷达细分市场、激光雷达发展现状

TOF激光雷达的类别







 工商网监
工商网监
评论