 如何配置基于激光的3D三角测量系统以及如何设置激光线参数
如何配置基于激光的3D三角测量系统以及如何设置激光线参数
从汽车和电子制造到木材加工,许多行业都会采用基于3D三角测量法的机器视觉系统。虽然使用三角法进行测量的概念并不复杂,但在系统实施的过程中,有许多关键的细节必须解决,包括如何配置基于激光的3D三角测量系统以及如何设置激光线参数。
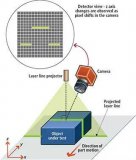
在基于激光的三角测量系统中,将一条狭窄的光带投影到3D表面,在非投影器的观察视角将会看到一条呈现扭曲的光线 (图1)。分析这些光线图像的形状,其结果可被用来进行物体表面形状的精确几何重构。
图1:从投射器以外的视角看到出现扭曲的激光线。这种失真被用来推导被测物的尺寸。
在一个3D三角测量系统中有4个重要的组成部分:摄像机、结构激光器、在整个拍摄视场中移动被测物或摄像机/激光器系统的机械结构、以及一款能够处理图像并能精确将像素位移转换成高度差异的图像软件。
三角测量结构
激光线投影系统有许多种不同的实现方式,每一种都有其独特的优缺点。图2展示了4种最常见的几何结构。
图2:4种常见的基于3D三角测量法的机器视觉系统配置。
在最常用的标准几何结构中 (Standard Geometry),激光线被垂直投射在名义上的测量 (X,Y) 平面内。这种结构最重要的特点就是被测物上沿投射光线的高度变化不会改变光线的Y轴坐标值。这将简化后续推导被测物形状所需的计算,从而更加快速准确的搭建系统并简化安装过程中的标定。
标准几何结构的一个缺点是摄像机从某个非垂直的角度拍摄被测物,这增加了对景深的要求,即使被测物的高度发生变化也必须保持聚焦。这也意味着随着高度 (从镜头到被测物的距离) 的变化,镜头要具备更大的放大倍率。因此,必须对被测物进行标定才能使系统推导出精确的测量结果。
这种方法会出现两个问题。首先,只要亮度被整条光束的长度平均掉,它就无法体现光束最大的绝对功率变化。其次,它忽略的恰好是通常表现最糟糕的光束边缘部分。
为了避免这些缺陷,相干公司为光束均匀度制定了严格的标准,基本上囊括了整条光束。具体而言,光束边缘被定义为光束功率下降至功率归一化峰值的80%的位置。光束亮度的平均值必须保证覆盖整个区域且在此区域内绝对功率值不能降低到低于峰值的75% (见图3)。和定义为光束指定区域内的平均值相比,这是更为严格的均匀性要求。
图 3:亮度积分vs.激光线的位置 ,标识峰值亮度 (Imax)、最小亮度 (IMin)、平均亮度 (IAvg) 及80%峰值功率。
这种更为严格的定义为系统开发者提供了两个重要的优势。第一,对于现有的设备和放射健康中心 (CDRH) 安全分类来说,其生成的投射光线的功率更高,这将在采集的图像中直接转化为更好的信噪比 (SNR),从而产生一个更快速更精确的视觉系统。这是因为CDRH分类仅仅基于峰值功率,而不考虑峰值出现在光束的哪个位置。因此,如果功率峰值出现在光束边缘 (这种情况经常发生),而光束中间部分的功率值相对非常低,则安全分类将会基于较高的值。
其次,符合这个规范将提高单元间的均匀性,对于系统集成商来说这将使产品的标定和维持系统的稳定性变得更加容易。这是因为在规范中有对绝对亮度下限的定义,相比于简单的依赖于平均值,这更加严格的限制了光束内可出现的差异总量。
激光线宽度
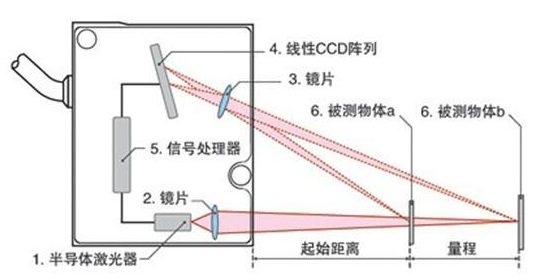
即使不存在制造误差,在实际工作中,随着激光和被测物之间距离的变化,激光线聚焦处的光线宽度和长度也会发生变化。此外,这种变化的幅度很大程度上取决于如何使用激光光源生成光线,因此采用何种投射器光学部件对系统性能有着显著的影响。
大部分光线投射器都基于二极管激光器,二极管激光器具有较大的光源尺寸,且在某一方向 (慢轴) 比垂直方向 (快轴) 的发散更低。这是二极管激光器的固有属性,正是由于这一事实,其发光面在某个维度比另一维度更长。激光线投射光学部件可被配置成沿快轴或慢轴的方向延展成激光线,且基于这一选择产生的衍射效应将在3个重要方面影响激光线的性能 (见图4)。
图4:变换二极管激光器输出的慢轴做为聚焦的激光线宽度方向将获得更宽的光束,但是其景深较大而“领结”效应不明显。
首先,焦点处较小的线宽可以通过定向输入激光束实现,使得快轴成为光束的宽度,而慢轴成为其长度。因为更窄的光线宽度能够提供更高的分辨率和功率密度,从而能够测量被测物表面更细微的高度变化。
但是衍射效应也会使高度聚焦的狭窄光线比较宽的光线更加快速的扩散到焦点之外。因此,获得较窄的聚焦线宽 (和更高的分辨率) 必然会牺牲一部分系统景深 (即超过该距离线宽将扩大到不可接受的水平)。
最后,还有一种颇为特殊的效果,即当一个平面被测物垂直于激光光束的光路,光束的边缘必须比光束中心更远到达被测物。这是因为在这段额外的距离上光束是发散的,光线宽度会出现边缘比中心略宽 (假设焦点为光线的中心位置)。这通常被称为“领结”效应。同样的,对于快速扩散的光束这种效应更为明显。
光线平直度
最后一个值得一提的激光线参数是平直度。在现实世界中投射的激光线很少是完全笔直的。最常见的是弓型,有时会出现轻微的“S”型。弓型通常是由于入射激光束以非正常入射角度进入光束整形光学器件而引起的。
因为光线平直度依赖于光学对准,因此在已有系统中,它可能会因为光学单元间的传输以及随时间发生变化。因此,必须将光线的平直度考虑在内才能对系统进行正确标定,从而获得精确的测量结果。
虽然使用激光三角测量系统采用激光线投射器能够提供比其他3D视觉技术更高的速度和精度,但是系统简化容易让人产生误解。结果主要取决于几个系统参数。此外,一些厂商会采用模糊或混淆的方式处理这些参数。因此,了解如何定义系统的关键参数非常重要,从而使最终的激光三角测量系统达到最佳的性价比。
责任编辑:lq
-
激光
+关注
关注
19文章
2736浏览量
63451 -
测量系统
+关注
关注
2文章
495浏览量
41064 -
机器视觉
+关注
关注
160文章
4027浏览量
118219
原文标题:基于激光3D三角测量法的理解
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
激光熔覆设备的配置如何选择

华为激光雷达参数怎么设置
阐述基于激光三角测距法的激光雷达原理


基于激光的3D三角测量系统中激光线参数设置
激光位移传感器不出光的原因 激光位移传感器的工作原理
激光打标机的参数

光学3D表面轮廓仪可以测金属吗?






 工商网监
工商网监
评论