 激光雷达的使命
激光雷达的使命
背景介绍
近日,中共中央、国务院印发了《国家综合立体交通网规划纲要》,并发出通知,要求各地区各部门结合实际认真贯彻落实。文件中特别指出,要提升智慧发展水平。推动智能网联汽车与智慧城市协同发展,建设城市道路、建筑、公共设施融合感知体系,打造基于城市信息模型平台、集城市动态静态数据于一体的智慧出行平台。
车路协同系统是通过无线通讯设备实现车、路信息交互和共享的系统,更是推动智能网联汽车行业的核心技术之一。在国家利好政策和5G商用的驱动下,中国车路协同行业市场规模将于2024年达到1841.1亿元人民币。专家表示中国车路协同行业将于2021-2022年迎来爆发式增长,届时中国车路协同行业将步入大规模商业化阶段,进而推动中国自动驾驶和智慧交通迈入新阶段。
中国车路协同行业市场规模将于2024年达到1841.1亿元人民币,预计2020至2024年中国车路协同行业市场规模年复合增长率将达到67.9%
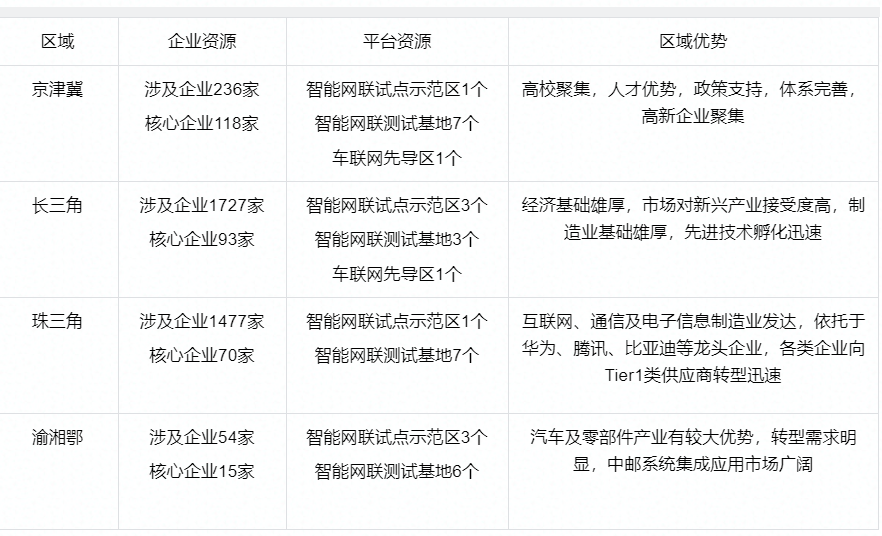
图 2020-2024中国车路协同行业规模(按产值计算) 预测 随着车路协同技术的逐渐普及,北京、上海、重庆和浙江等地区迅速出击,颁布相应的地方性政策,根据城市特色建立智能网联汽车试点示范区。 表 国内热点产业集群资源梳理
车路协同,最终需要提高的是车和路的“智能化水平”,以达到安全自动行驶的目的,也可以说,车路协同的智能化是无人驾驶实现的另一种进程。激光雷达是车端无人驾驶的核心感知传感器,是路端的路侧传感器,也就是我们经常说的路侧单元RSU,通过5G和其他通信方式,为车辆提供交通环境信息。那么激光雷达需要如何做,才能完成路端的使命呢?
图1 车路协同系统配合示意图
一
激光雷达的使命
安全智能行驶,对于车和路来说,都是绕不开的话题。车路协同中,激光雷达不仅要完整、准确感知交通环境的各种车辆、人员、基础设施的状态,还需要足够的安全冗余,应对各种“长尾效应”带来的问题。其实,真正的车路协同并不比自动驾驶门槛低。
图2 北醒Horn系列激光雷达探测十字路口点云效果
二
为什么是激光雷达
摄像头的缺陷主要来自于光线,在光线较差或强光干扰下,误判率高。探测距离受到光线影响变短,精度变低等。采用单一摄像头在路端计算需要极强的算力,信号传输和处理会有带宽和实时性的影响等。毫米波的缺陷主要在于对完全静止的物体几乎没有什么回波,而处于某些金属干扰的环境下,容易产生误报。激光雷达本身对环境光不依赖,24h全天时工作,因此大大增强了感知的适应性,对目标物的三维探测能力增强了探测的准确性,无论是静态或动态物体,均可捕捉。 路端的场景十分复杂,以在流量较大的十字路口为典型。事实上,仅仅依靠一种技术手段,误报、漏报都将成为安全隐患,无法对路况信息实现稳定的智能检测。如果将激光雷达与摄像头融合,一次性获得物体的位置、距离、尺寸、速度、方向、颜色等信息。
图3 北醒Horn系列激光雷达识别十字路口车辆及行人 1. 极强的数据采集能力1.1 探测距离远 机械旋转雷达一般有效测距为150到200米,采用1550nm人眼安全的北醒Horn系列激光雷达,探测距离可以超过300米,300米意味着在路端布线时,可以减少硬件成本,降低施工压力。 1.2分辨率高 市场上常见的激光雷达以16线、32线、64线为主,线束对应的参数是分辨率。图像级激光雷达还是数字激光雷达,都是将线束做到非常高,从而后期算法要求降低了难度,降低感知层面的难度。北醒和一些激光雷达厂商为了解决远距离小目标物探测能力,已经将分辨率做到了300-600线。针对车路协同应用,路面目标物种类多、数量多的特点,分辨率越高越能快速识别出来。
图4 北醒Horn系列激光雷达探测的斑马线 小目标物由于体积很小,因此激光雷达发射出去的光很难被接收回来。分辨率的高低主要由垂直角分辨率决定。垂直角分辨率的数值越小,代表则能探测到目标物的点越多,探测的清晰度越高,对于小目标物的点获取越多。如下图所示,垂直方向的间隔小,点云数量多。
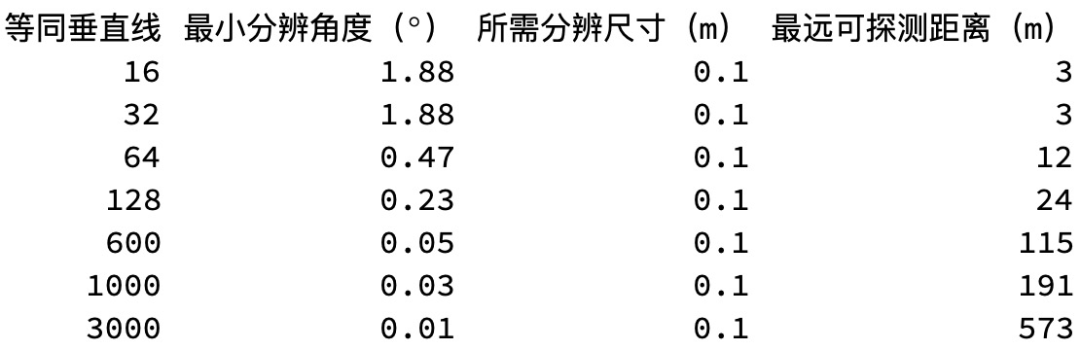
图5 同等距离下,垂直分辨率0.05°和0.1°的行人点云对比图 在垂直方向角分辨率上,北醒激光雷达的垂直角分辨率可精确到0.05°,是64线激光雷达的9.4倍,可以对远距离小目标物精准探测,对行人实际可探测与识别能力达到115米,而64线激光雷达线束过低,实际可探测与识别能力仅为12米以内。 表1 激光雷达等同线数与可识别小物体(0.1m)的最远距离关系
1.3 视场角广 路口安装的摄像头的覆盖区域一般只有10°左右,视野范围较窄。360°机械旋转雷达无疑拥有更多的视野,但是内部旋转结构让其使用寿命一直存疑。北醒Horn系列激光雷达不采取机械同轴旋转结构,具有横向90°的视场角度,探测范围远远大于摄像头,单台可以覆盖300m*300m的大场景。因此,检测相同路口,安装激光雷达的数量将远少于摄像头的数量。激光雷达方案比单一摄像头方案更利于检测大视野的闯红灯区域。 2. 融合的数据的能力2.1 集成摄像头等传感器 单一的摄像头方案只能提供二维信息,在强光或逆光时,拍摄及探测效果容易失效。特别在夜晚无环境光的情况下,摄像头方案基本失去作用。传统机械式雷达提供的点云非常稀疏,特别是挂在路测后,搜集到的有效点很少,很难与其它传感器融合。 北醒激光雷达可以提供每秒超过280万个点,最高1800*600的点云输出,易于与摄像头进行图像融合。这样的结合无论是汽车还是其他交通工具,均可以通过追踪像素,达到避障、减速、绕行的目的。这无疑是为自动驾驶及辅助驾驶带来新契机。
图6 点云+摄像头融合数据(左)和点云数据(右) 3. 部署方案简单3.1 支持客户部署方案 在车路协同应用中,为完美呈现Horn系列激光雷达的点云感知功能,北醒还将为客户提供支持,辅助客户基于北醒三维点云进行分析,各种传输协议,辅助客户项目快速落地和交付,实现对行人闯红灯报警、车辆碰撞预警、违法行为抓拍等功能。
图7 基于北醒激光雷达实现的车辆识别 3.2 安装部署 对于路测安装的激光雷达来说,一般会选取高度在6-7米的电线杆或电警杆横杆上。安装位置一般靠近道路中央,如图8所示,北醒Horn系列激光雷达探测距离远且视场角宽,一台即可同时检测道路往返双通道中不同车道上的目标物。对于视场角较小的雷达,至少需要安装2台以上激光雷达。
图8 北醒Horn系列激光雷达路侧安装方式 4. 易集成量产 360°机械旋转雷达由于机械旋转激光雷达在工作过程中整体光学和电子器件模组不断旋转,部件容易损耗,并且组装雷达过程中需要每个发射器和接收光子探测器的视场角度一一对应,需要人工调教,不利于自动化生产,量产较难。 市场上相对成熟、性能较好的是 32 线激光雷达,出货几千套的情况下报价为 4 万美元一个。北醒激光雷达采取光学一体化设计,实现产品小型化、轻量化,通过布局整个大交通领域来逐步实现量产,将成本大大降低。在车路协同应用中,综合考虑布置数量和软件能力,更快的降低总成本。
图9 北醒Horn-X2激光雷达实拍图
三
典型功能
城市道路 ETC高速公路 人车安全预警 触发抓拍 交通违章检测 车辆信息检测 车流量统计 异常事件预警 交通综合监控和指挥管理 交通监控和管理
责任编辑:lq
-
激光雷达
+关注
关注
961文章
3643浏览量
186633 -
无人驾驶
+关注
关注
97文章
3876浏览量
118962 -
智能网联汽车
+关注
关注
9文章
885浏览量
30858
原文标题:激光雷达在车路协同的“使命”是什么?
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
硅基片上激光雷达的测距原理

激光雷达测量技术与应用
一文通过AEC-Q102车规级芯片测试认证了解激光雷达核心技术及行业格局
激光雷达的基本构成 激光雷达由那些部分组成
机械激光雷达的组成包括哪些?
补盲激光雷达,照亮自动驾驶隐秘的角落






 工商网监
工商网监
评论