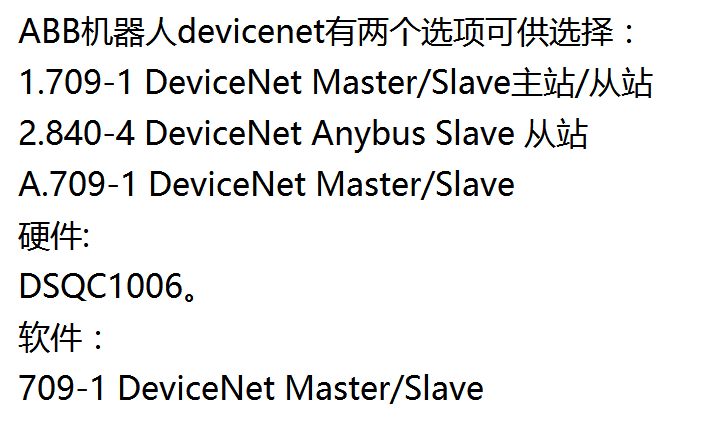
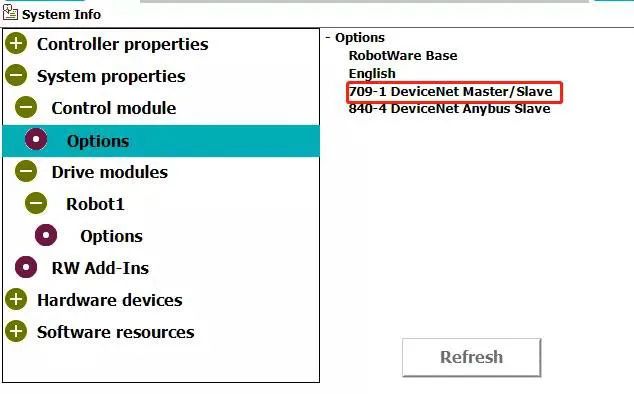
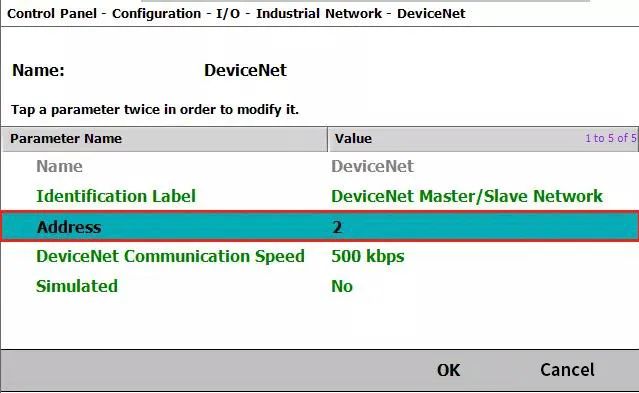
 ABB机器人DeviceNet通讯总线的两个可选项
ABB机器人DeviceNet通讯总线的两个可选项
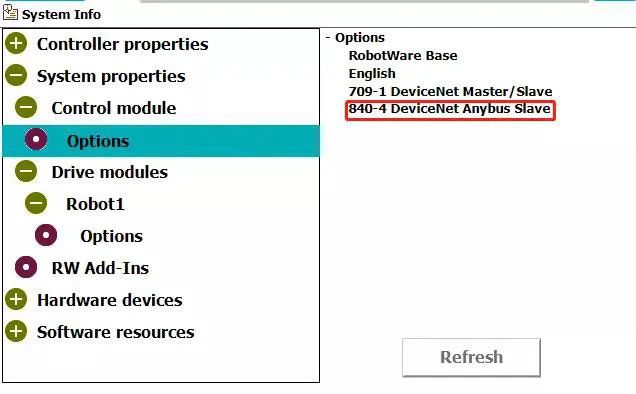
B.840-4DeviceNet Anybus Slave(比较少用)
硬件:
DSQC1003+DSQC1004。
软件:
840-4DeviceNet Anybus Slave
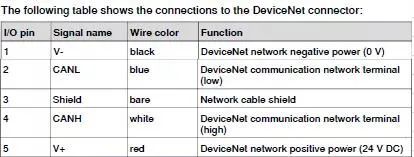
DeviceNet管脚定义

机器人为什么要使用现场总线和外围设备通讯呢?
当机器人与PLC通讯需要很多信号(成百上千)的时候,这个时候用现场总线通讯方式来达到机器人与PLC的信号交互。
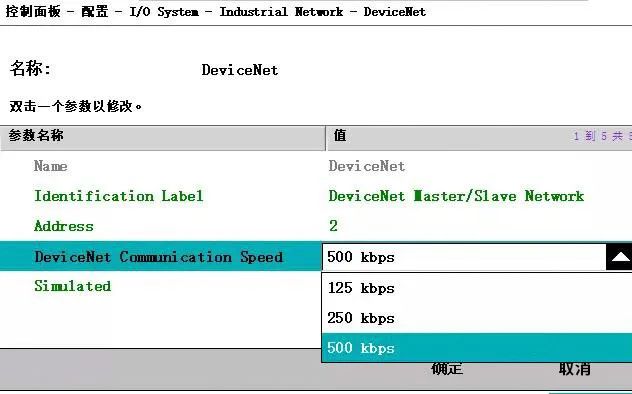
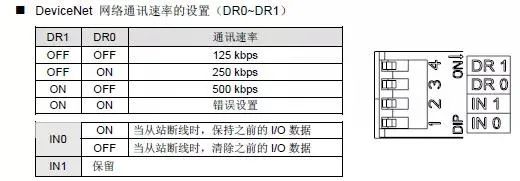
2.通讯速率设置:
机器人与PLC的通讯速率设置成一样
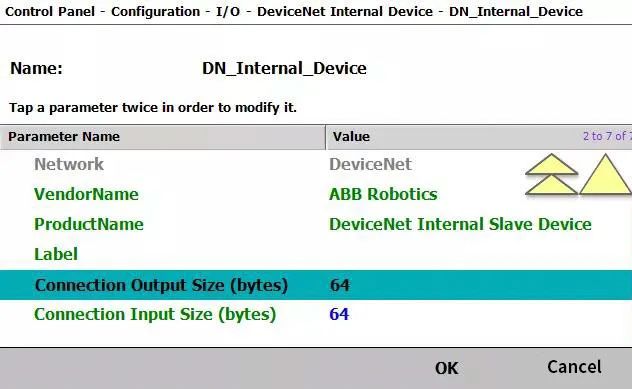
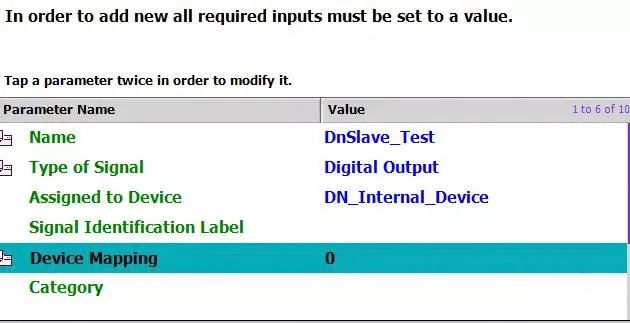
3.机器人输入输出字节大小配置:
ABB控制器DN_Internal_Device从站模块供使用
机器人从站输入输出字节数保证与PLC主站模块一致
4.机器人新建信号与PLC通信:
机器人的输入对应PLC的输出
机器人的输出对应PLC的输入
PLC的DeviceNet设置如下:
1.DVPDNET-SL设置站号

2.DVPDNET-SL设置通讯速率
3.将DVPDNET-SL设置成主站
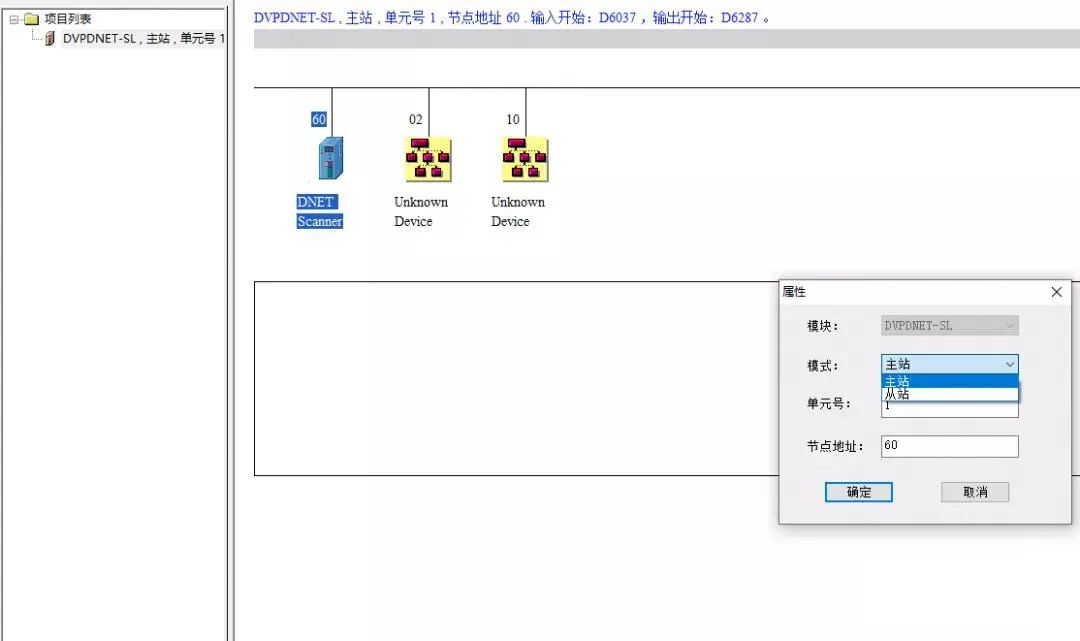
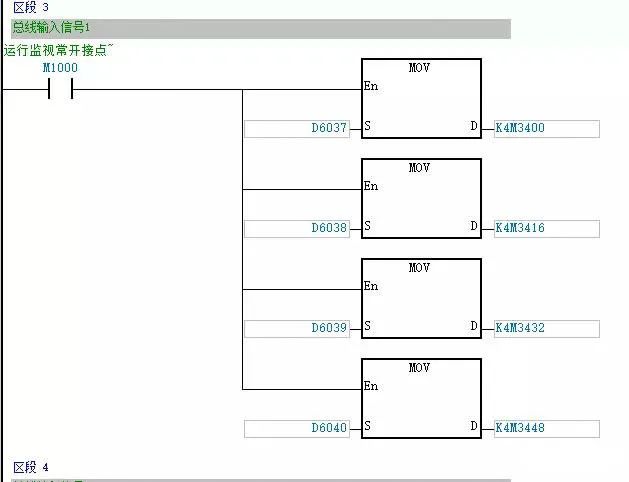
4.DVPDNET-SL分配输入输出字节

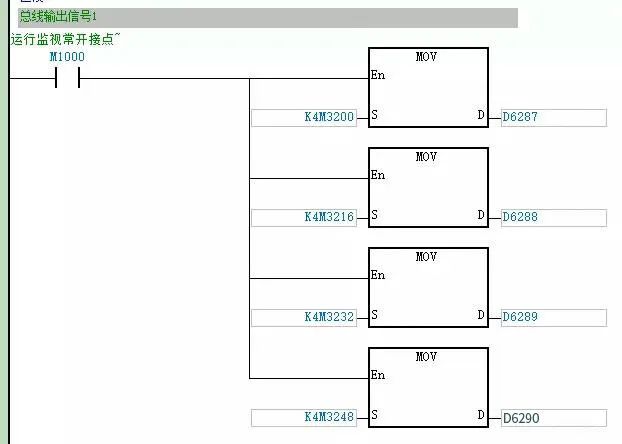
相应的D数据存储器就可以在PLC程序使用
一般习惯将D转换成M来使用
ABB机器人与外围设备之通讯篇
基于ABB控制器自带网口的通讯方式
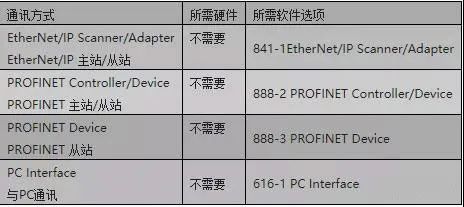
基于扩展板+Anybus适配器

基于PCIe插槽

针对外围设备,各家产品支持的通讯方式不尽相同,以下列出常用PLC所支持的通讯方式
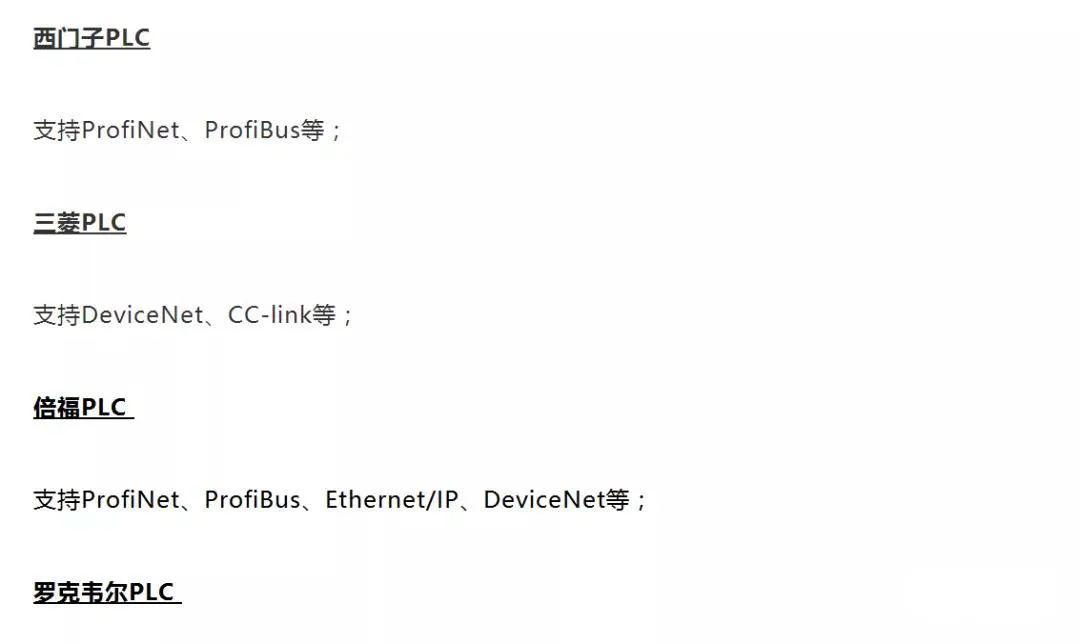
支持Ethernet/IP、DeviceNet等;欧姆龙PLC支持DeviceNet、Ethernet/IP(NJ/NX系列)等;基恩士PLC支持Ethernet/IP等;松下PLC支持Ethernet/IP等
与上位机与上位机通讯可使用PC Interface选项或者RS232进行通讯
常见于视觉系统与机器人通讯或者上位机控制机器人
责任编辑:xj
原文标题:ABB机器人DeviceNet通讯总线&《外围设备通讯》
文章出处:【微信公众号:PLC技术圈】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
206文章
27025浏览量
201374 -
通讯
+关注
关注
9文章
840浏览量
34364 -
总线
+关注
关注
10文章
2704浏览量
87205 -
ABB
+关注
关注
26文章
503浏览量
50923
原文标题:ABB机器人DeviceNet通讯总线&《外围设备通讯》
文章出处:【微信号:xue_PLC,微信公众号:PLC技术圈】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
用全志R128复刻自平衡赛车机器人,还实现了三种不同的操控方式
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
ai人工智能机器人
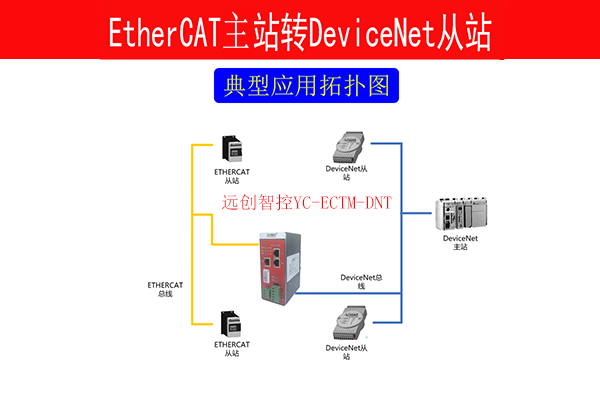
ETHERCAT 主站转DEVICENET 协议网关


profinet转ethernet网关连接发那科机器人配置案例
ETHERCAT转DEVICENET网关连接ethercat总线控制

ETHERCAT主站网关转DEVICENET连接devicenet通讯协议
DEVICENET转MODBUS-TCP网关应用案例






 工商网监
工商网监
评论