 新松机器人打磨抛光系统优点
新松机器人打磨抛光系统优点
笔记本外壳打磨单元主要由机器人及应用控制程序、气震磨头、定位工装、自动换砂纸机构、除尘间和滤芯除尘系统组成,实现对笔记本外壳的打磨工作。该单元结构紧凑、自动化程度高、打磨效果稳定,可有效代替人工在高污染的环境中工作,极大的减轻人工劳动强度,提高生产效率。
新松机器人打磨抛光系统优点
1.提高打磨质量和产品光洁度,保证其一致性;
2.提高生产率,一天可24小时连续生产;
3.改善工人劳动条件,可在有害环境下长期工作;
4.降低对工人操作技术的要求;
新松机器人打磨系统组成
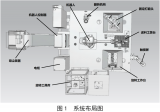
新松机器人打磨系统主要由以下几个核心设备组成:自动砂带抛光机,工业机器人本体,整机电柜,机器人电柜,双效送料台以及安全屏蔽装置等。新松公司结合客户需求,基于自主研发的工业机器人系列产品和控制系统,提供高效、领先的打磨系统解决方案。
责任编辑:lq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
工业机器人
+关注
关注
90文章
3263浏览量
91892 -
控制程序
+关注
关注
1文章
47浏览量
8946 -
新松机器人
+关注
关注
0文章
34浏览量
11682
原文标题:新松消费类电子产品机器人打磨系统方案
文章出处:【微信号:jiqirenyingyong,微信公众号:jiqirenyingyong】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
宏集应用丨宏集七轴机械臂,以精准力控实现柔性抛光打磨!
传统的手工抛光打磨存在劳动强度高、抛光效果不稳定、难以处理复杂形状、安全风险和无法满足高质量要求等痛点。因此,应用工业机器人进行自动化表面精加工的技术随之崛起。
LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核
发表于 12-21 20:03
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进
发表于 11-30 16:01
ai人工智能机器人
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。
如今的智能电话机器人,每天的电话拨打量可达800-1000通,相比人工提高了3-5倍,大大缩短了名单的筛选
发表于 09-21 11:09
机器人+力控控制一体化打磨完整解决方案:高柔性、高精度、高效率!
埃斯顿在金属加工领域具有完整解决方案,折弯、焊接、钣金、打磨抛光等领域具有行业领先的优势。基于对打磨领域深厚的工艺积淀,埃斯顿推出「机器人+力控控制一体化」

【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
本帖最后由 机智小编 于 2023-8-16 17:37 编辑
一、前言
本草莓采摘机器人控制系统是由江西理工大学机械工程专业的程鹏胜设计开发完成。针对某草莓种植基地模块化种植的高架草莓人工
发表于 08-16 17:35
基于工业机器人与PLC的自动化打磨集成工作站
设计,随后以PLC、工业机器人为核心设计工作站控制系统,最后调试程序并完成实体零件打磨。试验表明,该工作站可以高效、高质量完成零件打磨。 工业机
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
,施工较为方方便,能够适应各种使用环境。
02二维码导航
二维码导航属于视觉识别,实现原理是在地面铺设二维码阵列,通过移动机器人(AGV/AMR)下方的相机扫描二维码实现机器人的定位。
**二维码导航优点
发表于 06-28 09:52
探索机器人对打磨自动化难点的技术
以深度融合了工业级力控技术、机器视觉和先进AI的自适应机器人为基础,非夕从机器人所需的底层能力出发,探索解决打磨自动化难点、满足多样打磨需求
发表于 06-08 15:41
•337次阅读
如何快速地让机器人投入生产
机器人也是一种设备,它主要内容是完成一个制造的其中一个功能。
制造一个产品,可以分为几个部件。和装配几个部件。
一个部件,可以是一个模具。或者由机器人完成组成一个模具。
机器人主要完成的是一些模具
发表于 06-06 16:18
机器人复杂曲面打磨抛光主轴 全自动高精度打磨很简单
速科德Kasite打磨抛光主轴主要对高精度零件的加工处理,如汽车零部件、光纤接插件陶瓷加工、义齿加工雕铣等行业。这些高精度零件如果在抛光打磨过程中稍有误差可能就会导致零件的报废,造成较
浅谈儿童陪护机器人
儿童陪护机器人越来越受到人们的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被广泛应用于儿童陪护机器人中的转动控制。本文将从步进电机芯片的工作原理、优势和应用场景等方面
发表于 05-11 15:12





 工商网监
工商网监
评论