 如何通过IPC通信玩转传感器数据?
如何通过IPC通信玩转传感器数据?
1、rt-smart的第一个应用程序,imx6ull用户态点灯
简介
首先纠正一下上一篇文章中,在我的仓库中,1月11日的代码会出现系统崩溃。原因在于我的驱动中内存物理地址映射到虚拟地址的操作有问题,我已经把这个bug解决了,如果有兴趣,欢迎拉取最新的代码。
这一篇来介绍我在rt-smart的第二个应用。这个应用将加入rt-smart与rt-thread区别之处--进程间的通信。
功能主要是在用户态读取传感器数据,传感器是100ASK_imx6ull板载的ap3216c,它是采用I2C总线进行通信。
为啥这次会先对接I2C呢?因为接下来想把屏幕在rt-smart跑起来,但是屏幕的触摸芯片采用I2C,所以就把他先跑起来。
目前屏幕已经在rt-thread上跑起来,但是在rt-smart没有跑起来,目前在研究LCD的缓存是一个什么样一个形式。
100ask_imx6ull驱动对接情况:
rt-threadrt-smart
GPIO√√
I2C√√
lcd√×
100ask_imx6ull的rtt仓库:
rt-thread的仓库:https://gitee.com/RiceChen0/imx6ull_rt_rthread
rt-smart的厂库:https://gitee.com/RiceChen0/imx6ull_rt_smart
环境
100ask_imx6ull开发板。
两条micro USB线。
电源。
windows电脑一台。
I2C驱动适配
在imx6ull中,我适配的是硬件I2C,imx6ull有4组I2C接口。软件I2C后续不会进行适配,因为在这颗芯片上,软件I2C的必要性不大。
如果你要了解RT-Thread的I2C设备驱动框架,可以看一下我之前的文章《rt-thread驱动框架分析》-i2c驱动
在上一篇文章中《rt-smart的第一个应用程序,imx6ull用户态点灯》讲到,rt-smart不能直接使用物理地址访问硬件,而需要采用虚拟地址。所以需要进行地址映射(rtt提供的API:rt_hw_kernel_phys_to_virt)。
首先需要查看imx6ull的芯片手册,需要将I2C相关的物理地址找到。为了不要重复造轮子,定义了一个结构体:struct i2c_addr_config,并把4组I2C相关的地址作为一个表格。如下:
#define I2C1_SCL_MUX_BASE 0x020E00B4U
#define I2C2_SCL_MUX_BASE 0x020E00BCU
#define I2C3_SCL_MUX_BASE 0x020E00E4U
#define I2C4_SCL_MUX_BASE 0x020E00ECU
#define I2C1_SCL_CFG_BASE 0x020E0340U
#define I2C2_SCL_CFG_BASE 0x020E0348U
#define I2C3_SCL_CFG_BASE 0x020E0370U
#define I2C4_SCL_CFG_BASE 0x020E0378U
#define I2C1_SCL_INPUT_BASE 0x020E05A4U
#define I2C2_SCL_INPUT_BASE 0x020E05ACU
#define I2C3_SCL_INPUT_BASE 0x020E05B4U
#define I2C4_SCL_INPUT_BASE 0x020E05BCU
#define I2C1_SDA_MUX_BASE 0x020E00B8U
#define I2C2_SDA_MUX_BASE 0x020E00C0U
#define I2C3_SDA_MUX_BASE 0x020E00E8U
#define I2C4_SDA_MUX_BASE 0x020E00F0U
#define I2C1_SDA_CFG_BASE 0x020E0344U
#define I2C2_SDA_CFG_BASE 0x020E034CU
#define I2C3_SDA_CFG_BASE 0x020E0374U
#define I2C4_SDA_CFG_BASE 0x020E037CU
#define I2C1_SDA_INPUT_BASE 0x020E05A8U
#define I2C2_SDA_INPUT_BASE 0x020E05B0U
#define I2C3_SDA_INPUT_BASE 0x020E05B8U
#define I2C4_SDA_INPUT_BASE 0x020E05C0U
struct i2c_addr_config
{
I2C_Type *i2c;
size_t i2c_scl_mux_base;
size_t i2c_scl_config_base;
size_t i2c_scl_input_base;
size_t i2c_sda_mux_base;
size_t i2c_sda_config_base;
size_t i2c_sda_input_base
};
static struct i2c_addr_config addr_config[] =
{
{I2C1, I2C1_SCL_MUX_BASE, I2C1_SCL_CFG_BASE, I2C1_SCL_INPUT_BASE, I2C1_SDA_MUX_BASE, I2C1_SDA_CFG_BASE, I2C1_SDA_INPUT_BASE},
{I2C2, I2C2_SCL_MUX_BASE, I2C2_SCL_CFG_BASE, I2C2_SCL_INPUT_BASE, I2C2_SDA_MUX_BASE, I2C2_SDA_CFG_BASE, I2C2_SDA_INPUT_BASE},
{I2C3, I2C3_SCL_MUX_BASE, I2C3_SCL_CFG_BASE, I2C3_SCL_INPUT_BASE, I2C3_SDA_MUX_BASE, I2C3_SDA_CFG_BASE, I2C3_SDA_INPUT_BASE},
{I2C4, I2C4_SCL_MUX_BASE, I2C4_SCL_CFG_BASE, I2C4_SCL_INPUT_BASE, I2C4_SDA_MUX_BASE, I2C4_SDA_CFG_BASE, I2C4_SDA_INPUT_BASE},
};
将物理地址转为虚拟地址,代码如下:
for(i = 0; i 《 sizeof(addr_config) / sizeof(addr_config[0]); i++)
{
addr_config[i].i2c = (I2C_Type *)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c), 0x1000);
addr_config[i].i2c_scl_mux_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_scl_mux_base), 0x1000);
addr_config[i].i2c_scl_config_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_scl_config_base), 0x1000);
addr_config[i].i2c_scl_input_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_scl_input_base), 0x1000);
addr_config[i].i2c_sda_mux_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_sda_mux_base), 0x1000);
addr_config[i].i2c_sda_config_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_sda_config_base), 0x1000);
addr_config[i].i2c_sda_input_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_sda_input_base), 0x1000);
}
在imx6ull中,I2C需要的步骤,引脚初始化为I2C,然后I2C总线初始化便可以了。
目前imx6ull上,rt-thread和rt-smart都适配I2C,所以可以先看一下rt-thread的仓库,然后再看rt-smart的仓库,可能更加理解它的区别。
I2C的应用:
100ask_imx6ull中,板载有ap3216c传感器,挂载在I2C1总线上。而且RT-Thread中有相应的软件包,对接了RT-Thread的传感器设备框架,这给我验证代码提供便携。不过要在用户态中使用该软件包,还需要做一点操作,需要注册该传感器设备。
int ap3216c_test()
{
struct rt_sensor_config cfg;
cfg.intf.dev_name = “i2c1”;
cfg.mode = RT_SENSOR_MODE_POLLING;
rt_hw_ap3216c_init(“ap”, &cfg);
return RT_EOK;
}
INIT_DEVICE_EXPORT(ap3216c_test);
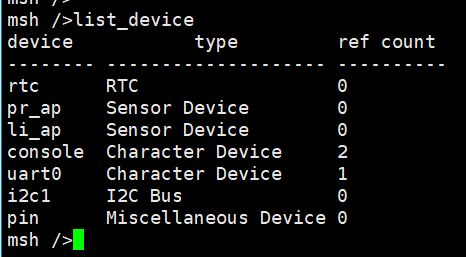
然后编译烧录,通过list_device就可以看到相对应的设备(pr_ap和li_ap),如下:
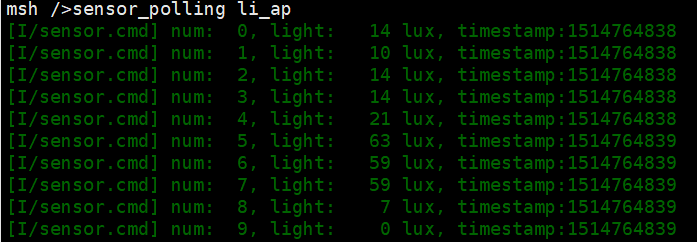
RT_Thread的传感器框架很贴心,提供了测试命令(sensor_polling li_ap),这样就可以初步验证传感器是否正常工作,通过验证,传感器和I2C适配都能正常工作:
上面的验证都是在内核态中测试的,而这篇文章的目的是要在用户态中读取传感器数据,为了进一步了解rt-smart和RT-Thread的区别,我这个应用采用进程通信(IPC)做了例子,该例子将上一篇文章例子结合起来:
有两个进程, 进程1和进程2
进程1,通过接收等待进程2读取的传感器数据是否超标的状态,来进行闪灯。
进程2,通过读取ap3216c传感器光强度数据,判断是否超过50lux,如果超过则通知进程1进行闪灯提示。
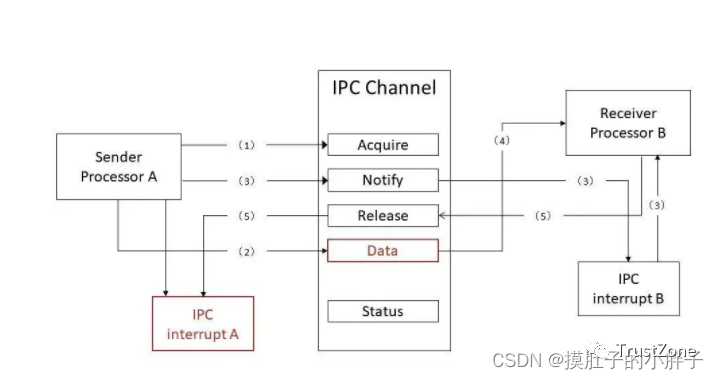
IPC通信,详情可以查看官网:https://www.rt-thread.org/document/site/rt-smart/architecture/architecture/。
进程1,等待接收通道发来的“warning”信息,然后进行闪灯操作:
int main(int argc, char **argv)
{
struct rt_device_pin_mode pin_mode;
struct rt_device_pin_status pin_status;
int server_ch;
int shmid;
struct rt_channel_msg msg_text;
char *str;
printf(“RiceChen rt-smart first app
”);
/* create the IPC channel for ‘server’ */
server_ch = rt_channel_open(“server”, O_CREAT);
if (server_ch == -1) {
printf(“Error: rt_channel_open: fail to create the IPC channel for server!
”);
return -1;
}
printf(“
server: wait on the IPC channel: %d
”, server_ch);
pin_dev = rt_device_find(“pin”);
if(pin_dev == RT_NULL)
{
printf(“not find pin device
”);
return RT_ERROR;
}
rt_device_open(pin_dev, RT_DEVICE_OFLAG_RDWR);
pin_mode.pin = LED_PIN;
pin_mode.mode = 0; //OUTPUT
rt_device_control(pin_dev, 0, (void *)&pin_mode);
pin_status.pin = LED_PIN;
while(1)
{
rt_channel_recv(server_ch, &msg_text); //接收通道信息
shmid = (int)msg_text.u.d;
if (shmid 《 0 || !(str = (char *)lwp_shmat(shmid, NULL)))
{
msg_text.u.d = (void *)-1;
printf(“server: receive an invalid shared-memory page.
”);
rt_channel_reply(server_ch, &msg_text); /* send back -1 */
continue;
}
if(strcmp(str, “warning”) == 0) //判断是否接收到“warning”信息
{
printf(“light warning.
”);
pin_status.status = 1;
rt_device_write(pin_dev, 0, (void *)&pin_status, sizeof(pin_status));
rt_thread_mdelay(200);
pin_status.status = 0;
rt_device_write(pin_dev, 0, (void *)&pin_status, sizeof(pin_status));
rt_thread_mdelay(200);
pin_status.status = 1;
rt_device_write(pin_dev, 0, (void *)&pin_status, sizeof(pin_status));
rt_thread_mdelay(200);
pin_status.status = 0;
rt_device_write(pin_dev, 0, (void *)&pin_status, sizeof(pin_status));
rt_thread_mdelay(200);
}
lwp_shmdt(str);
msg_text.type = RT_CHANNEL_RAW;
msg_text.u.d = (void *)1;
rt_channel_reply(server_ch, &msg_text);
}
return 0;
}
进程2,间隔两面读取一次传感器光强度数据,然后判断是否操作50lux,超过则通过通道通知进程1进行闪灯:
int main(int argc, char **argv)
{
rt_device_t ap3216c_dev;
struct rt_sensor_data sensor_data;
int res;
int server_ch;
char warning_msg[256] = { 0 };
size_t len = 0;
/* channel messages to send and return back */
struct rt_channel_msg ch_msg, ch_msg_ret;
printf(“RiceChen rt-smart second app
”);
/* open the IPC channel created by ‘pong’ */
server_ch = rt_channel_open(“server”, 0);
if (server_ch == -1)
{
printf(“Error: rt_channel_open: could not find the ‘server’ channel!
”);
return -1;
}
ap3216c_dev = rt_device_find(SENSOR_NAME);
if (ap3216c_dev == RT_NULL)
{
rt_kprintf(“Can‘t find device:%s”, SENSOR_NAME);
return -1;
}
if (rt_device_open(ap3216c_dev, RT_DEVICE_FLAG_RDWR) != RT_EOK)
{
rt_kprintf(“open device failed!”);
return -1;
}
rt_device_control(ap3216c_dev, RT_SENSOR_CTRL_SET_ODR, (void *)100);
while(1)
{
res = rt_device_read(ap3216c_dev, 0, &sensor_data, 1); //读取传感器数值
if (res != 1)
{
rt_kprintf(“read data failed!size is %d
”, res);
}
else
{
rt_kprintf(“light:%5d lux, timestamp:%5d
”, sensor_data.light, sensor_data.timestamp);
}
if(sensor_data.light 》 50) //判断阈值
{
ch_msg.type = RT_CHANNEL_RAW;
snprintf(warning_msg, 255, “%s”, “warning”);
len = strlen(warning_msg) + 1;
warning_msg[len] = ’‘;
int shmid = prepare_data(warning_msg, len);
if (shmid 《 0)
{
printf(“clent: fail to prepare the clent message.
”);
continue;
}
ch_msg.u.d = (void *)shmid;
rt_channel_send_recv(server_ch, &ch_msg, &ch_msg_ret); //发送警报信息
lwp_shmrm(shmid);
}
rt_thread_mdelay(2000);
}
rt_device_close(ap3216c_dev);
rt_channel_close(server_ch);
return 0;
}
演示
原文标题:rt-smart用户态通过IPC通信玩转传感器数据
文章出处:【微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
传感器
+关注
关注
2521文章
47940浏览量
739581 -
通信
+关注
关注
18文章
5695浏览量
134284 -
操作系统
+关注
关注
37文章
6254浏览量
121830 -
IPC
+关注
关注
3文章
303浏览量
51338
原文标题:rt-smart用户态通过IPC通信玩转传感器数据
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
HarmonyOS跨进程通信—IPC与RPC通信开发
stm32和传感器进行通信,为什么返回的数据基本是0呢?
HarmonyOS传感器开发指南
无线传感器网络中几种无线通信技术比较分析
核间通信(IPC)的目标和实现机制
PLC该如何与传感器通信





 工商网监
工商网监
评论