 机器人的关节是如何做到精准控制的?
机器人的关节是如何做到精准控制的?
现在工业机器人的自动化程度让人叹为观止,5轴6轴机器人具有如此多的关节,还能够做到运动和指令的精确传输,各部位紧密配合完成复杂的工作,让人不禁好奇它们的传动系统到底是怎样的,关节到底是什么结构的呢?
关节是工业机器人最重要的基础部件之一,也是运动的核心部件:精密减速机。这是一种精密的动力传达机构,其利用齿轮的速度转换器,将电机的回转数减速到所要的回转数,并得到较大转矩的装置,从而降低转速,增加转矩。
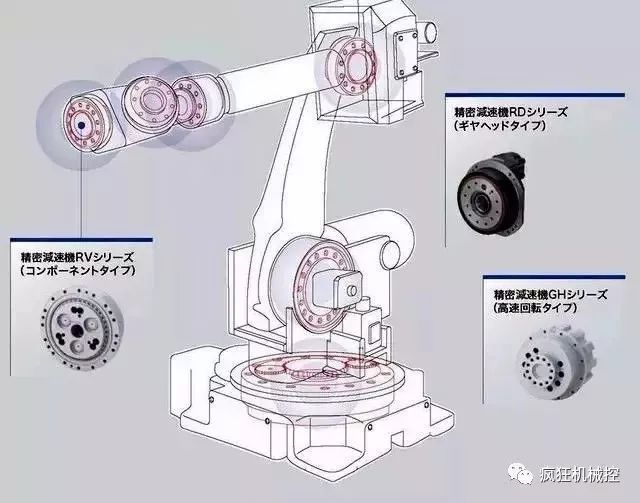
机器人关节处的减速传动,要求传动链短、体积小、功率大、质量轻和易于控制,同时,对于中高载荷的工业机器人,还需要足够的刚度、回转精度和运动精度稳定性。 机器人关节减速传动结构↓↓↓ 目前全球能够提供规模化且性能可靠的精密减速器生产企业不多,绝大多数市场份额都被日本企业占据:Nabtesco的RV减速器约占60%,Harmonica的谐波减速器约占15%,还有住友重工(SUMITOMO,未查到比例)。尤其在机器人领域的应用比例,是压倒性的。
Nabtesco(纳博特斯克)是由帝人精机和纳博克(1956年生产了日本第一个自动门)这两家日本公司强强合并组成。作为运动控制系统和零部件的生产商,这两家公司都在其特定的业务领域,掌握了高端核心技术,控制着很大的市场份额。
作为世界上最大的精密摆线针轮减速机制造商,Nabtesco生产高性能减速机、中空轴减速机,以及单轴伺服执行器和控制器。
其生产的精密设备具有高扭矩、高刚性和高耐过载冲击荷载能力的同时,兼有高精密和非常低的回程间隙,被广泛应用于卫星、雷达天线、工业机器人、半导体和焊接技术等工业自动化领域。
日本Harmonic Drive Systems Inc.(简称HDSI)是整体运动控制的领军企业,其生产的Harmonic Drive组合型谐波减速机,具有轻量小型、无齿轮间隙、高转矩容量等特点,被广泛应用于工业机器人、仿人机器人、半导体液晶生产装置、光伏设备、光学仪器、精密机床等各种尖端领域。
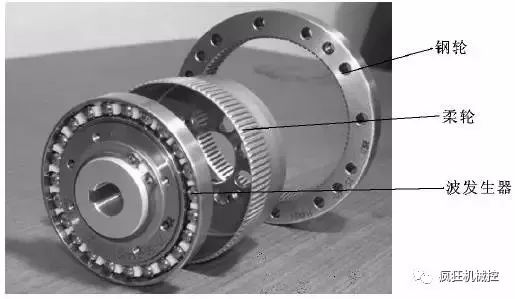
▲谐波减速器内部结构 为了涵盖谐波减速机所不能做到的低减速比领域,HDSI产品还涉及到精密行星齿轮箱型谐波减速机Harmonic Planetary。独特的内齿圈形变工艺,可以使得行星齿轮与其啮合的更紧、消除背隙,已达到精密级的传动误差。 日本住友SUMITOMO是拥有400多年历史的世界500强之一的住友集团旗下的建设机械厂家,住友产品在1967年凭借自身技术,开发研制了第一台液压挖掘机之后,目前世界各地到处活跃着住友液压挖掘机的身影。
住友减速机包含各种型号减速机,如住友大型斜齿轮减速箱,住友行星齿轮减速机,住友斜齿轮减速机,住友蜗轮蜗杆减速机等。减速比大,效率高,针齿啮合系套式滚动摩擦,啮合表面无相对滑动,一级减速效率可达94%。
原文标题:机器人关节如何做到精准控制的,原来内部结构这么复杂!
文章出处:【微信公众号:工业机器人前沿】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
机器人
+关注
关注
206文章
27025浏览量
201369 -
工业机器人
+关注
关注
90文章
3263浏览量
91892
原文标题:机器人关节如何做到精准控制的,原来内部结构这么复杂!
文章出处:【微信号:robotqy,微信公众号:机械自动化前沿】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

LabVIEW的六轴工业机器人运动控制系统
让机器人实现开发自由,探索精密工艺的机器人关节模组
剑指人形机器人赛道,泰科机器人推出重磅关节模组

搭建机器人关节力控制系统步骤
智能机器人RJSIIZ系列关节模组助力智慧医疗技术突破

没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
机器人关节电机控制:精密、智能和协调的控制系统

ai人工智能机器人
基于Matlab和VR技术的移动机器人建模及仿真
如何精准分析人形机器人运动数据?






 工商网监
工商网监
评论