 基于树莓派的自动回收瓶子的智能机器人设计方案
基于树莓派的自动回收瓶子的智能机器人设计方案
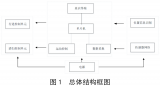
我们使用了带有Arduino(克隆)的Raspberry Pi来控制移动平台。瓶子识别软件基于基于Haar功能的级联分类器,用于通过OpenCV进行对象检测。Raspberry Pi上的代码是用Python编写的,它提供了比C / C ++更快的开发时间,但是开销更大。事实证明,这很有用,因为该机器人在很短的时间内就赢得了比赛。该文档非常广泛,因为它是必需的,并且从初始构想到最终零件以及仿真文件的每个细节都可用。
机器人会避开障碍物,直到摄像机看到并识别出瓶子,一旦在Raspberry Pi上运行Python脚本检测到瓶子,其位置就会转发到Arduino板上,后者在状态机中托管主程序,并传递至下一个状态:抓瓶子。抓住瓶子后,归位系统非常简单:它使用指南针沿着回收区域的方向(地图的拐角)移动,一旦检测到墙壁(而不是障碍物),它就会跟随它直到到达拐角处。释放瓶子。重复。

最初的计划是使用2个红外传感器和摄像头进行障碍检测,但是摄像头速度太慢,最终模拟结果表明,更多的红外传感器将是一个更简单的解决方案,并且同样有效,因此我们决定使用4个红外传感器并且仅将相机用于瓶子检测。指南针传感器在摄像机后面的原始位置遇到了很多麻烦,事实证明建筑结构地板上的金属条正在影响指南针值,并将其更高地安装在解决此问题的桅杆上。
责任编辑:xj
文章出处:【微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27025浏览量
201377 -
电路设计
+关注
关注
6565文章
2316浏览量
195311 -
智能
+关注
关注
8文章
1680浏览量
116935 -
树莓派
+关注
关注
113文章
1638浏览量
104728
原文标题:基于树莓派的自动回收瓶子的智能机器人
文章出处:【微信号:cirmall,微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【开源作品】基于树莓派4B、ESP32制作的桌面机器人、气象站、立方光!
;gt;>点此查看全文
基于树莓派 4B DIY 能笑会动的桌面机器人
Emo是一款基于树莓派4做的个人伴侣
发表于 03-05 16:52
基于树莓派的四足喷水机器人设计
今天小编给大家带来的是来自B-AROL-O团队带来的基于树莓派的四足喷水机器人,该机器人可以在农场环境中自主导航,识别需要浇水的植物并自动浇水,视觉系统采用的是 Luxonis 的 O

【爱芯派 Pro 开发板试用体验】基于爱芯派 Pro 开发板的警用安防智能机器人设计
技术的可用性。 基于基于爱芯派 Pro 开发板的警用安防智能机器人设计:
AX650N是一款兼具高算力与高能效比的SoC芯片,集成了八核A55 CPU,43.2TOPs@INT4或
发表于 01-14 21:56
【开源项目】Emo:基于树莓派 4B DIY 能笑会动的桌面机器人
Emo是一款基于树莓派4做的个人伴侣机器人,集时尚与创新于一身。它不仅仅是一款机器人,更是一个活生生的存在,与其他机器人不同,它拥有独特的
发表于 12-26 15:18


基于树莓派的机器人设计方案
准备树莓派和 CRICKIT Hat
1、如果你已经安装了 CRICKIT Hat 的 40 针连接器的转接端子,请将其取下。
如果我们希望按钮引线适合而不被后面板压扁,我们需要帽子
发表于 10-19 12:31
•327次阅读

基于树莓派的交互机器人设计
今天小编给大家带来的是加拿大Maker Levent Erenler 的DOLY robot的机器人项目,该项目基于树莓派CM4(Raspberry Pi Compute Module 4)打造,集人脸识别、语音识别、物体识别、桌面助手、移动监控于一身,可以作为学习开发平

【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
机器人的动作流程
三、草莓采摘机器人的控制系统设计
1、硬件部分介绍
草莓采摘机器人设计的硬件控制系统框图如图2.1所示,包括核心控制单元、传感器、驱动器等。核心控制单元包括单片机和树莓
发表于 08-16 17:35
光伏组件智能清洁机器人设计方案
在光伏发电系统中,光伏组件表面积聚灰尘、异物,会很大程度上影响光电转换效率。为此,设计了一种光伏组件智能清洁机器人,包括对其硬件系统和清洁方案的设计,能够实现对光伏组件的自动清扫。同时
机器人设计:解决人类问题的新思路
不再仅仅是科幻小说中的情节,机器人已经进入到我们的工作、学习和日常生活中,为我们解决了许多问题。本文将探讨机器人设计如何成为解决人类问题的新思路。






 工商网监
工商网监
评论