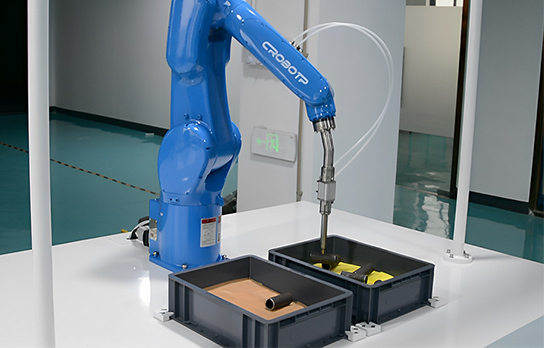
 高精度相机加持下的3D视觉无序分拣系统
高精度相机加持下的3D视觉无序分拣系统
12月22日,2020高工机器人&高工移动机器人年会技术向新专场,熵智科技CTO高磊以“高精度相机加持下的3D视觉无序分拣系统”为主题发表演讲。
数据显示,2019年城镇非私营单位就业人员年平均工资9.05万元,一线技术员工和高技能人才年薪超过15~20万元,制造业人才流失,企业用工劳动力成本增加,机器换人拐点即将到来。
谁将成为主战场
而劳动力成本持续增加,加剧了机器人向各行业渗透的速度,以汽车行业为例,2020年相比2011年,汽车零部件领域机器人数量增长10倍。基于视觉的无序抓取技术将进一步拓展机器人应用范围。
由于3D视觉是从国外发展而来,所以在应用过程中不可避免的受到了国外市场的影响,衍生出了两个大方向,那就是物流和工业。随着探索的不断深入,对国情的不断了解,3D视觉真正的机会正在显露。
从底层逻辑来讲,目前物流领域机器人加视觉系统在物流中属于单站优化系统,能做到的就是节省某些人力成本。但是对于当前的中国仓储物流行业而言,还面临的是基础建设的问题,即如何提升仓储密度、最大化提高吞吐量、提升周转效率,单点优化更多的是技术先进性的代表。
而在工业领域,无序分拣的机会则越来越明显,尤其是在在重工、汽车等行业。首先在重工、汽车等行业,机器人的使用已经非常普遍,加装视觉进行辅助操作并不需要对原有产线进行改造,反而可以一步到位。
其次其生产节拍相比之下并没有物流分拣那么快,速度在几秒到十几秒不等,更多的要求是定制化,这就完美契合了当下的国内3D视觉厂商立足国内市场的优势,所以近年来重工、汽车行业对视觉无序分拣的应用开始不断加快。
作为一家专注于3D视觉无序分拣和超高精度测量检测的国家高新技术企业,熵智科技总公司位于深圳,另设武汉分公司和西安研发中心,目前研发和工程团队50余人。熵智科技拥有百余项自主知识产权,其中已授权近百项。
自2018年成立以来,熵智科技凭借软硬件一体的技术优势,为众多国内外知名企业提供了成熟的高精尖视觉技术,满足客户日益增长的高要求。目前,熵智科技的3D视觉无序分拣系统已成功应用于零部件和重工行业的多个无序抓取场景中。
高识别成功率+高抓取成功率
“视觉无序分拣的厂家越来越多,也正在进入市场培育期,但对于客户来讲,无序分拣的难度究竟在哪里,很多人其实比较朦胧。”高磊讲到。
无序抓取,先识别,后抓取,所以其两大难点就是如何保证高识别率和高抓取成功率。
首先来看如何提升高识别率。在很多人的认知中3D视觉已经开始变为一个纯软件或者软件占据主导的产品,但这其实是不对的。纵观当下的视觉/相机产业链,凡是能做到业内顶尖的,其相机设备一定顶尖。”高磊表示。
例如,工业现场,天窗、侧窗下环境光直接影响结构光成像,经过现场测量亮度最高可达3300lux。常规的低亮度光机投射的光栅容易被环境光淹没而无法成像。
而采用激光光机(高亮度)的高精度相机更易形成较高的工件识别率,因为无序状态的工件,3D点云配准应对多种散乱姿态比2D DL的方法更有效,工件点云形状特征越准确,识别率越高,可抓工件选项越多。
“相机代表成像能力,在某些高端/复杂场景下,高精度相机是无序抓取的必备。”高磊表示。
熵智科技自主研发的激光结构光3D相机,是一种大视野、高精度,适应4000lux环境光强的结构光3D相机,该产品主要用于大视野3D视觉引导机器人。在覆盖长宽深1.2m*1.0m*0.8m料框的视野下,手眼标定误差在2mm以内。
按照标准流程标定完毕后,无需额外人工经验补偿,直接可用,不依赖于外接参照物,更换手抓或更换料框无需重新标定,集3D视觉、深度学习、运动规划等技术为一体,采用图形化免编程,可进行模块化拖拽、连线、参数配置,免编程部署工程项目流程等功能。
其次,就是如何提高抓取成功率,这里面要搞明白的是相机识别位姿与抓取位姿的关系。
首先来看较为常见的3D视觉引导上料(3D Picking),其无需工装治具,换产快,可适用于工件位姿未知,倾角30°以内的工料,其识别位姿=抓取位姿,仅需避碰,无需抓取规划。
而最新的无序分拣上料(Bin Picking),虽然其和3D视觉引导上料一样无需工装治具,换产快,但其可以识别倾角-90~90°位姿未知的来料,可以做到1种识别位姿适配几十种抓取位姿,避碰的基础上,优化抓取位姿。
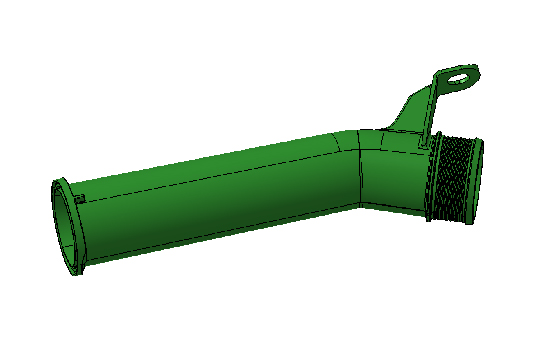
“以我们做的汽车零部件外球笼案例为例,其每一个轮毂上面都有一个传动的零件,机器人会面临多抓取点、多抓取姿态、可抓工件更多。通过我们的相机,我们最终给出的解决方案包括独特的30度倾角手手抓、力控感知工件叠压、自动更换抓取目标、减少异常停机次数、抓取二次Check、检测异常、快速恢复、定点工具等多种功能,保证客户降本增效。”高磊讲到。
简单来说,常见的运动规划是指机械臂伸入料框,抓取依赖机械臂本体运动学模型,其自研和维护机械臂本体技术,可靠性有待进一步验证;而熵智科技的抓取规划,手抓伸入料框,机械臂在料框外,不依赖机械臂本体运动学模型,系统更成熟可靠,采用的是可靠的机械臂本体技术+成熟的抓取规划技术。
总结下来就是抓取姿态比机械臂运动轨迹更有效,更易提高抓取成功率。
“所以,综合来看,工业应用从来都是软硬件结合,如果只拥有某一个单类,永远会受制于人或者遇到瓶颈。死磕核心硬件,专注于工业级3D相机硬件和软件,以自主研发的优势成像系统+视觉项目团队的二合一,就是熵智科技未来打赢‘视觉淘汰赛’,在视觉行业扎根的资本。”高磊说道。
原文标题:【拓斯达 | 高工年会】熵智科技高磊:高精度相机加持下的3D视觉无序分拣系统
文章出处:【微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
机器人
+关注
关注
206文章
27015浏览量
201360 -
相机
+关注
关注
4文章
1253浏览量
52435 -
3D视觉
+关注
关注
4文章
393浏览量
27297
原文标题:【拓斯达 | 高工年会】熵智科技高磊:高精度相机加持下的3D视觉无序分拣系统
文章出处:【微信号:gaogongrobot,微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐




如何实现高精度的3D感知
光学3D表面轮廓仪可以测金属吗?
解决方案 | 3D视觉引导胶管无序抓取上下料
美的入局3D工业相机


Pro-M/XL相机快速入门指南
嘲风Pro 3D相机客户端及SDK使用说明书
基于相机和激光雷达的视觉里程计和建图系统

3D深度机器视觉和机器臂的无序抓取






 工商网监
工商网监
评论