 RoboGrammar系统可以虚拟测试各种机器人设计
RoboGrammar系统可以虚拟测试各种机器人设计
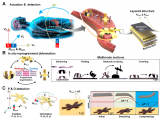
据外媒SlashGear报道,有几种方法可以确定哪种机器人设计可被用于最有效地穿越各种地形。最耗时的方法是简单地制造每一个机器人的变体,并在现实世界中进行测试 。麻省理工学院(MIT)开发了一个名为RoboGrammar的系统,可以虚拟测试各种机器人设计,并确定哪种机器人最适合穿越特定类型的地形。
首先,研究人员要“告诉”计算机系统他们身边摆放的机器人零件,包括轮子、关节等东西。研究人员把机器人需要穿越的地形类型输入,RoboGrammar就会完成剩下的工作。计算机系统会生成一个优化的结构以及控制机器人所需的程序。
研究论文的主要作者、麻省理工学院博士生Allen Zhao表示,机器人设计是一个“非常手动的过程”,并指出RoboGrammar是一种开发 “新的、更有创造性的机器人设计 ”的方法。Allen表示,通常人类-机器人设计师在需要了解穿越各种地形的情况时,会转向四足机器人等机器人上,但研究人员想知道这是否是最佳设计。
RoboGrammar是作为一个计算机模型来设计机器人的,因为该系统并没有过多地受到之前传统的影响。虽然创造性是计算机系统所希望的,但也有一些规则存在。该团队开发了他们所谓的“图形语法”。他们表示,如果计算机系统只是简单地连接零件和任意的方式,其结果是零件的混乱。这些规则是为了确保计算机生成的设计能够在基本层面上运行。控制系统的规则特别受到节肢动物的启发。
责任编辑:YYX
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27025浏览量
201369 -
计算机系统
+关注
关注
0文章
213浏览量
23879
发布评论请先 登录
相关推荐
基于树莓派的四足喷水机器人设计
今天小编给大家带来的是来自B-AROL-O团队带来的基于树莓派的四足喷水机器人,该机器人可以在农场环境中自主导航,识别需要浇水的植物并自动浇水,视觉系统采用的是 Luxonis 的 O

【爱芯派 Pro 开发板试用体验】基于爱芯派 Pro 开发板的警用安防智能机器人设计
安防智能机器人是专门应用于公共安全领域的特殊机器人。区别于普通移动机器人,除了具有自主导航的功能外,还可以进行人脸抓拍、身份识别、语音交互,主要应用包括协助执勤、自主安防、提供便民服
发表于 01-14 21:56
LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。La
发表于 12-21 20:03
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。图1
随着工业智能化的快速发展,智能机器人设备已成为工业自动化体系的佼佼者,而智能机器人设备核心—ROS系统,是
发表于 11-30 16:01


一种全新磁控机器人设计制造技术研究
北京航空航天大学陈华伟教授课题组报道了一种全新磁控机器人设计制造技术,针对磁控机器人的原位运动编程和位姿感知需求,通过4D喷涂打印制备一种新的碳-磁薄膜多层材料,实现电热磁化和电阻应变传感的功能耦合,达到多模态驱动和位姿感知一体化。
发表于 09-26 12:37
•685次阅读
从 0 到 1 搭建机器人系列 | 利用 NVIDIA Jetson 和硬件加速 SDK 打造自主机器人
问 机器人可以“变身”为咖啡师吗? 答 当然!机器人成为咖啡师的秘密武器是自主机器学习。想象一下,机器人

机器人设计:解决人类问题的新思路
不再仅仅是科幻小说中的情节,机器人已经进入到我们的工作、学习和日常生活中,为我们解决了许多问题。本文将探讨机器人设计如何成为解决人类问题的新思路。

profinet转ethernet网关连接发那科机器人配置案例
PLC,设置好机器人的IP地址,打开机器人设置菜单找到主机通讯选项;
7、找到搬运机器人控制端的TCP/IP选项;
8、设置机器人的IP地址(本例为192.168.0.10
发表于 08-03 17:58
深开鸿:OpenHarmony 基于虚拟化技术在机器人领域的应用
近日,“OpenHarmony城市技术论坛——长沙站”在湖南大学成功举办。本次论坛以“机器人技术”为主题,聚焦基于OpenHarmony系统的机器人应用,以及当前我国机器人领域所面临的

如何快速地让机器人投入生产
重复使用。按功能以生产线设备,机器人设备如此整理后,可以形成一个函数库。加上c语言的mach函数库,并整理一个三角函数库后。我们的设备就可以通用了。上什么生产线都没问题。不要太依靠示教器,以及
发表于 06-06 16:18






 工商网监
工商网监
评论