 自动泊车系统组成及技术原理
自动泊车系统组成及技术原理
相信许多刚出“茅庐”的驾驶新手对于侧方位停车一事十分的头痛,而这项技能也是日常驾驶中必不可少的科目之一。大城市停车空间有限,将汽车驶入狭小的空间已成为一项必备技能。很少有不费一番周折就停好车的情况,停车可能导致交通阻塞、神经疲惫和保险杠被撞弯。幸运的是,汽车制造商则为大家考虑到这点,技术的发展为之提供了解决之道,这就是自动泊车功能。
自动泊车又称为自动泊车入位,它对于新手来说是一项相当便捷的配置,对于老手来说也省了些不少力气。当您找到了一个理想的停车地点,不必再来回折腾,而只需轻轻启动按钮、坐定、放松,其他一切即可自动完成,彻底消除你在停车中遇到的麻烦。
自动泊车的实现过程
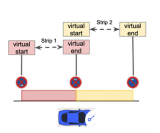
自动泊车技术大部分用于顺列式驻车情况。顺列式驻车要求汽车沿路边平行停放,与其他停好的汽车排成一条直线。大多数汽车用户需要比车身长出约1.8米的停车位,才能顺利完成顺列式驻车,尽管有些熟练驾驶员只需要更少的空间。
为了顺列式驻车,驾驶员必须遵循以下五个基本步骤:
1、将汽车开到停车位的前面,停在前面一辆车的旁边。
2、向路边转动车轮,以大约45°将车向后切入停车位。
3、当汽车前轮与前车的后轮平行时,驾驶员拨直前轮,然后继续倒车。
4、当通过后视境确保与后面车辆保持一定距离后,驾驶员从路边向外打车轮,将汽车前端回转到停车位中。
5、最后,驾驶员在停车位前后移动汽车,直到汽车距离路边约0.3米为止。
现有的自动泊车汽车并不是全自动的,但这种车的确使顺列式驻车更加容易。驾驶员仍然必须踩着制动踏板控制车速(汽车的怠速足以将车驶入停车位,无需踩加速踏板)。然后,车上的计算机系统将接管方向盘。
当驾驶车辆沿道路行驶时,只要车速低于36公里/小时(每款车型时速的设定值会有不同),系统就会认为驾驶者有停车意图,车辆便开始利用雷达探头自动检测周围是否有合适的停车位置。一般车型自动泊车系统所设定的可用停车区域长度要大于车身1.2米以上,才可确认该区域属于可停范围。
当自动泊车系统找到合适的停车位置后,此时挂入倒档,系统会提示驾驶者是否启动主动停车辅助功能,确认启动后,现在驾驶者就可以双手离开方向盘了,其方向盘将自动转动调整车辆倒车方向,驾驶者只需要控制油门及刹车掌握车速(当驾驶者手握住方向盘,系统就会暂停工作)。
在倒车过程中,驾驶者需要适当控制车速和注意倒车雷达的提示音,当听到报警后,说明已于后车非常接近了。此时需要挂入前进挡,车子在前进的同时,系统将自动回轮,把车子的位置摆正,屏幕提示信息更新为停车已完成,挂入空挡,轻松完成停车任务。(小提示:有部分装备自动泊车系统的车型倒入车位后,没有自动回轮过程,需要驾驶者手动自己完成)
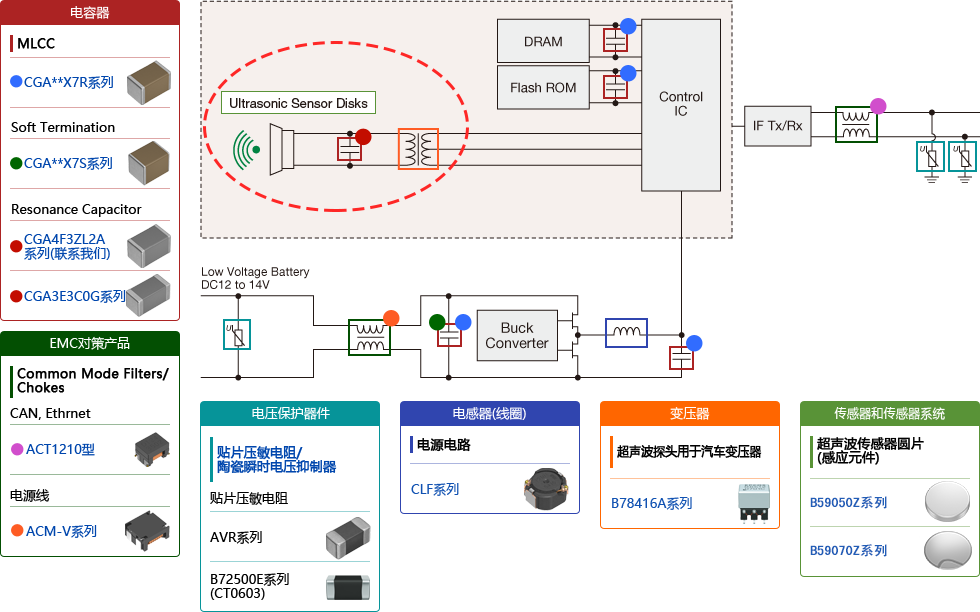
自动泊车系统组成及技术原理
自动泊车系统由以下部件组成:
1、超声波传感器:共有12个,位于前后保险杠上,它们发射超声波信号,然后接收从障碍物反射回来的信号,并根据从发射到接收信号的时间长短来评估与障碍物的距离。车辆保险杠正前方前雷达监测距离为100cm,后方监测的距离为120cm,其中左前和右前外侧距离传感器用于探测停车位的长度和宽度。
2、驻车定位系统(PTS)控制单元:位于行李箱中左侧,主要有以下作用,读取各种电子元件输入信号,如车速、挡位状态、点火开关状态、电动方向机的状态等信号,促动车距传感器和警告元件,通过Flex Ray总线与CAN网络通信。
3、警告元件:前部警告元件集成于仪表中,当车速低于16km/h时,驻车系统切换至测量模式。后部警告元件位于后风挡玻璃上方,在车速低于16km/h时,警告部分亮起向驾驶员发出视觉警告。
4、电动助力转向机构:由齿轮齿条式转向机、扭矩传感器(A91b1)、电动电动机(A91m1)和转向机构控制单元(N68)组成,N68读取A91b1的信号和来自ESP的轮速信号,据此促动A91 m1,从而带动齿轮齿条式转向机运转,实现转向功能。
5、转向管柱模块控制单元:读取方向盘转角和转向角速度,并通过Flex Ray总线与CAN R络通信。
6、车辆稳定系统控制单元:具有控制自适应制动、制动力分配(EBD)、防抱死制动(ABS)、起步加速防滑控制(ASR)、电子牵引辅助(ETS)、制动辅助(BAS)等功能疤通过分析各传感器(如轮速传感器)传来的信号,然后向ABS、ASR发出纠偏指令(正确的控制指令),来帮助车辆维持动态平衡使车辆可以在各种状况下保持最佳的稳定性。在转向过度或转向不足的情形下,稳定效果更加明显。后轮驱动汽车常出现的转向过度情况,后轮失控而甩尾,ESP便会迅速轻微制动外侧的前轮来稳定车子(注意:此时制动,不会使车轮抱死,旨在降低轮速)。在转向不足时,ESP则会迅速轻微制动内后轮,从而校正车辆行驶方向。
遍布车辆周围的雷达探头测量自身与周围物体之间的距离和角度,然后通过车载电脑计算出操作流程配合车速调整方向盘的转动。
该系统包括环境数据采集系统、中央处理器和车辆策略控制系统,环境数据采集系统包括图像采集系统和车载距离探测系统,可采集图像数据及周围物体距车身的距离数据,并通过数据线传输给中央处理器。
中央处理器可将采集到的数据分析处理后,得出汽车的当前位置、目标位置以及周围的环境参数,依据上述参数作出自动泊车策略,并将其转换成电信号。
车辆策略控制系统接受电信号后,依据指令作出汽车的行驶如角度、方向等方面的操控,直至停车入位。
不同的自动泊车系统采用不同的方法来检测汽车周围的物体。有些在汽车前后保险杠四周装上了感应器,它们既可以充当发送器,也可以充当接收器。这些感应器会发送信号,当信号碰到车身周边的障碍物时会反射回来。然后,车上的计算机会利用其接收信号所需的时间来确定障碍物的位置。其他一些系统则使用安装在保险杠上的摄像头或雷达来检测障碍物。但最终结果都是一样的:汽车会检测到已停好的车辆、停车位的大小以及与路边的距离,然后将车子驶入停车位。
自动泊车技术的种类及发展
被动式自动泊车
被动式在泊车时提醒驾驶员前方或车辆后方障碍。在发展的过程中从只有后方预警,发展成车辆往前运动前方检测也有预警、加入视觉图像、加入辅助线还有周边盲区预警,到现在最复杂的是两种系统结合,包括倒车雷达+360度环视的两种功能。
被动式主要利用超声波传感器+蜂鸣器+HMI图标来提示驾驶者外部障碍物情况,防止车辆在倒车时碰撞,一般由下面几个功能构成:
1、防碰撞声音+图像提示
2、测量停车位大小的系统
3、提供转弯角度的提示
4、提供后视图像和辅助线检测
5、360度环视图像
被动式是充分考虑了成本的系统,采用低成本的超声传感器来实现倒车时候的障碍物检测,一般距离为1米~1.5米的情况,消费者对此类系统接受度高。
半主动式泊车辅助
随着自动化水平的提高,各个汽车公司都想要帮助驾驶者更好地停车,所以开发出来了不同的系统,这些系统的特点是一般需要驾驶员来负责油门和刹车,车辆帮忙计算轨迹路径,帮助驾驶员入库。

其系统构成为:
1、超声传感器
2、半自动泊车ECU控制器
3、外部传感器:轮速、加速、转弯角度、转矩、车速、变速箱情况
4、HMI按纽和前后报警蜂鸣器
5、EPS控制转向系统
对消费者来说,档位需要控制、加速和减速都需要控制,整个过程中的责任需要承担。各个车企,在HMI、车位大小上面有差异,基本的操作没有差异。
全自动泊车
从半自动泊车到全自动泊车的进化过程中:
首要点:人是否需要在车内,仅通过手机可以指挥车进行泊车。
档位:在泊车过程中轨迹计算需要调整的时候,出现不成功的情况,系统是否有切换档位、实现前后进退的权限。
加速:系统有没有权限来自己进行加速。
刹车:系统是不是会检测到碰撞之后控制刹车系统。
可以看到这基本上是整个泊车把人的工作全部接盘过去的过程。
我们看到的就是比较酷的人在外面用手机进行操控:
停车场自动泊车
从半主动泊车到全自动泊车,人还是需要找到车位的。目前正在研究的所谓Valet Parking(停车场自动泊车),就完全是不需要你去找到那个车位的概念了。在某些充电运营的模式中,ValetParking被赋予更多的意义:
1.停车位的自动搜索:车辆自动地寻找空车位,而且发现空车位。
2.电动车的无线充电:对电池进行无线充电。
3.充电完成之后的停车位分离:充电完成后,系统自动将充电槽释放给其它电动车辆,转而寻找普通停车位。
4.乘客召唤使用车辆:在限定运行的场景出口处,将车辆交还给所有人。
自动泊车技术的优点及注意事项
优点:自动泊车对于新手来说是一项相当便捷的配置,对于老手则是省了不少力气。此外,该系统还可避免因停车不注意发生的剐蹭。
注意事项
1、即使有自动泊车系统提供帮助也不能代替驾驶员注意力,仍需要观察确认。
2、不是所有空隙都能自动停车入位,需预留更多空间达到系统要求条件方可操作。
3、自动泊车并不是完全不用驾驶员任何操作,还是需要根据提示来控制刹车及挂入相应挡位,当驾驶员人为干预时(如打方向),则自动泊车系统会当即停止。
4、自动泊车系统激活后,一般是先寻找合适的停车位,不是所有停车位都可实现自动泊车。如今不少系统已经不仅支持侧方停车了,还能实现倒库停车。
5、各品牌车型自动泊车系统的操作方式及启用条件都不尽相同。
6、树叶、废弃物或冰雪盖住路沿时,驻车转向辅助系统可能很难识别到路沿。此外树叶和冰雪还会造成超声波信号反射时严重散射,使系统接收到可能导致出错的弱超声回波。
7、如果空位上有尺寸较小的警示柱等障碍,系统可能会识别不出而把该空位作为有效的停车位,车速降低有助于提高系统识别空位中小尺寸物品的可能性。
8、在自动泊车过程中仍会有声音提示驾驶员可能发生的碰撞。
责任编辑:lq
-
自动检测
+关注
关注
0文章
111浏览量
15433 -
雷达
+关注
关注
48文章
2674浏览量
115526 -
自动泊车
+关注
关注
0文章
92浏览量
13566
原文标题:停车入位不再是难题 详解自动泊车系统
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
极氪007公测启动,量产机械车位自动泊车业内首创
特斯拉全新自动泊车功能上线,可平行泊车

贸泽开售用于高级驾驶辅助系统和自动泊车的 Texas Instruments TDA4x SoC处理器
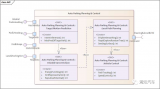
如何设计时序图—以APA自动泊车系统为例

利用具有预测和运动规划的集成策略优化自动泊车系统
吴新宙离职之后:小鹏汽车自动驾驶的历史与未来挑战

自动泊车是如何实现的 自动泊车系统组成及技术原理图解

行易道科技基于车载SAR毫米波雷达成像技术助力自动泊车
经纬恒润新产品系列 | 行泊车一体产品家族

DRIVE Labs“常学常新”系列「终点站」:寻找车位与自动泊车
基于自动泊车的自动驾驶控制算法设计与研究






 工商网监
工商网监
评论