 上海发那科开发了智能机器人自动化物流拆垛系统
上海发那科开发了智能机器人自动化物流拆垛系统
纸箱及周转箱是当今的工厂中必不可少的物流载体,关于它们的拆垛应用,有不少难题:垛形复杂多变、箱体种类繁多等。为解决上述难题,上海发那科开发了智能机器人自动化物流拆垛系统,为您提供了一种机器人+3D视觉+AGV的解决方案。
该系统主要由1台R-1000iA/80F机器人、1台FANUC三维广域传感器和AGV小车等其他周边配套设备构成。AGV小车将堆有纸箱或周转箱的托盘运至三维广域传感器下方,完成拍照、点云生成、位置获取后,由机器人自动完成相应的搬运拆垛过程,载有纸箱或周转箱的托盘再由AGV小车运出。
图1 R-1000iA/80F
纸箱及周转箱的拆垛采用的是FANUC中型机器人R-1000iA/80F,紧凑的机械结构使它更擅长紧凑空间的高速码垛和搬运工作。最大80Kg的负载能力则足以应对纸箱及周转箱的高速搬运。

图2 标准应用场景下的3DA/1300
对箱体的识别定位采用的是FANUC三维广域传感器3DA/1300。三维广域传感器(3D Area Sensor)是FANUC iRVision中的核心成员之一,根据安装方式、视野范围和精度可选的还有3DV系列传感器。
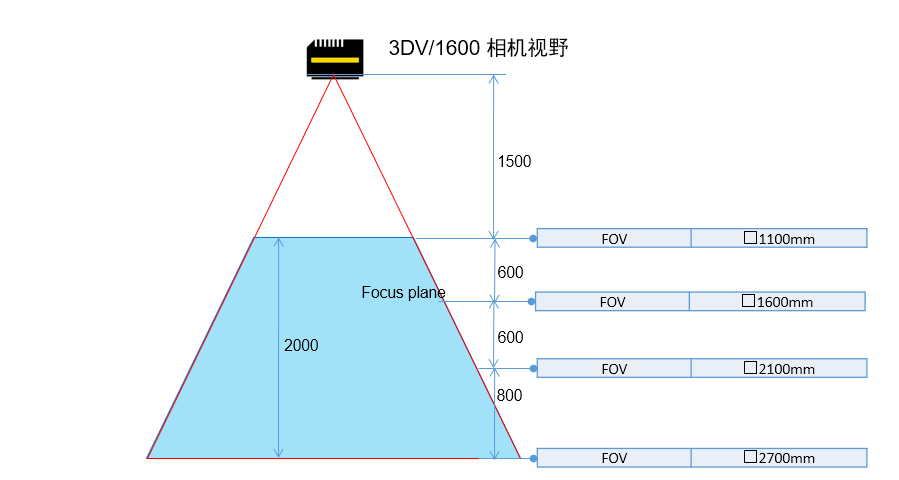
图3 DV/1600传感器的视野
3DA/1300在1340mm*1000mm的大视野下,利用双目结构光的原理,使用两台相机配合投影仪获取到的差异图像快速计算得到点云信息。
3D视觉系统与机器人高度集成,3DA/1300传感器通过接口模块(CCU和Multiplex)与主板连接,传感器获取的图像和点云数据在机器人内部计算,无需第三方设备或工控机。支持单台机器人连接多台3DA传感器,可根据用户定制的需要添加3DA传感器和接口模块。
机器人刷入模块化的视觉软件包后,即在机器人示教器上即可完成相机设置及校准、视觉程序设定等一系列流程,在机器人TP程序内使用指令调用视觉程序(图4)即可实现视觉定位并引导机器人准确抓取工件,视觉画面可在实时示教器监控或外接显示器中实时监控(图5),当机器人出现视觉方面报错时,会直接在TP屏幕中输出对应错误代码,方便快速找到错误原因,提高工作效率。
图4 TP程序中调用视觉指令
图5 视觉实时监控
视觉软件和硬件的高度集成和多功能的模块化组合方便安装、调试和维护,减少项目周期。视觉硬件享受和机器人本体相同的质保,一旦生产现场过程中任何软硬件问题,FANUC将第一时间派出经验丰富的工程师到达现场,解决后顾之忧。
视觉软件中包含种类多样的命令行工具也为3DA/1300的应用带来了更多的可能。平面测量工具(Area Sensor Plane Tool)是周转箱拆垛中的必备工具。通过2D特征确定平面位置,结合点云获取工件倾斜角度,在具有2D视觉高速度、高精度优点的同时,又带有3D视觉特有的角度识别能力,使得周转箱即使在托盘上有一定的倾斜角度,也能准确识别空间位置,完成抓取。iRVision中还有专门为纸箱拆垛开发的箱子检出工具(Area Sensor Box Locator Tool),用于在混合拆垛中检出指定尺寸的纸箱。两个工具的组合使得视觉程序能够应对多变的垛形和表面形状各异的周转箱,实现真正的智能化拆垛。
同时三维广域传感器也是料框散堆件识别抓取(Bin Picking)的检测设备之一,配合FANUC强大的工件列表管理功能、干涉避让计算功能、料框偏移补偿功能、接触跳出功能,Bin Picking的应用将更加简单、高效。目前FANUC最新的R-30iB Plus控制器下搭载的该视觉系统还支持3D数模STL格式文件的直接导入,复杂工件的散堆取件调试将变得更加简单。
图6 纸箱拆垛
这套系统还有以下几个特点:
换手台使得机器人在周转箱及纸箱的交替拆垛中切换自如
配合三维广域传感器的干涉避让功能,保护机器人与周边设备
机器人放置过程中视觉拍照检出,节约每一秒
检出结果示教器实时查看,简化了视觉系统的调试及维护
本套智能机器人自动化物流拆垛系统具有可应对混合拆垛、调试简便、自动化程度高等优点,能够满足物流行业及工厂上料中的拆垛需求,进一步提高了生产效率。
责任编辑:lq
-
传感器
+关注
关注
2524文章
48038浏览量
739915 -
自动化
+关注
关注
28文章
5032浏览量
77722 -
智能机器人
+关注
关注
17文章
823浏览量
81320
原文标题:智能机器人自动化物流拆垛应用
文章出处:【微信号:robotqy,微信公众号:机械自动化前沿】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

AMR机器人如何赋能智慧物流?





ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
稳石机器人|日化行业智慧物流:打造高效绿色供应链
创想焊缝跟踪系统在发那科机器人上的应用案例


profinet转ethernet网关连接发那科机器人配置案例






 工商网监
工商网监
评论