 国自推出新品:SLIM前移机器人和SLIM搬运机器人
国自推出新品:SLIM前移机器人和SLIM搬运机器人
国自SLIM系列产品已覆盖搬运、堆垛、前移三大主要车型。
11月3日,浙江国自机器人技术股份有限公司在本届CeMAT ASIA 第一天重磅发布了SLIM家族两款新型叉式机器人——SLIM前移机器人、SLIM搬运机器人,这是继2019年发布SLIM堆垛机器人后,SLIM家族时隔一年半再次迎来新成员。
2019年,国自推出了首款SLIM堆垛机器人,截止目前已有近50个项目完成验收,目前正在实施的项目超过10个。涉及包括汽车、食品饮料、医药、工程机械、家电、纺织、3C等十余个行业,并在北美、欧洲、日韩等海外市场实现项目落地。为了让SLIM满足更多场景、更多条件(不同载具、不同高度、不同工艺)下的客户需求,让SLIM走向更多的行业,进一步推动智能物流行业的发展,SLIM搬运机器人、SLIM前移机器人应运而生。
SLIM前移机器人:可“田”可“川”,hold住所有属具;更高堆垛,更强的柔性化配置。不仅能适应使用最为广泛的“田”字、“川”字托盘,还可适应各类非标准属具,更能按客户需求定制属具,以满足不同场景需求。工作通道宽度仅为2M,最大荷载达到1.4T,起升高度达到4.5M。SLIM搬运机器人:吸取工业叉车优点,更高负载、更长续航、更安全。自重仅为380Kg,并将工作通道宽度缩减至1.6M,最大荷载达到2T。
小身材大载重是SLIM家族产品的共同优势,除此之外两款新产品均设计前后激光安全设计,实现360度全方位保护,并通过CE认证;简化设计,全自主研发,拥有较高的稳定性;模块化设计,易于部署及维护。搭载国自自主研发的GRACE系统,支持混合导航模式。柔性对接,实现平库堆叠、不固定托盘的搬运。
而随着两款新产品的推出,国自机器人SLIM系列产品已覆盖搬运、堆垛、前移三大主要车型,几乎能涵盖所有人工叉车使用环境中的需求。目前,SLIM家族化已基本成形,可以预见后续将为国自在智能物流机器人领域持续快速发展奠定充分的市场优势,也为智能物流机器人行业的发展带来了变革。
责任编辑:xj
原文标题:SLIM家族又添新成员——国自推出两款新型叉式AGV
文章出处:【微信公众号:新战略机器人】欢迎添加关注!文章转载请注明出处。
-
移动机器人
+关注
关注
2文章
718浏览量
33312 -
AGV
+关注
关注
26文章
1089浏览量
40596 -
SLIM
+关注
关注
0文章
7浏览量
6226
原文标题:SLIM家族又添新成员——国自推出两款新型叉式AGV
文章出处:【微信号:robotinside2014,微信公众号:移动机器人产业联盟】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
协作机器人和工业机器人区别在哪?
LabVIEW的六轴工业机器人运动控制系统
用全志R128复刻自平衡赛车机器人,还实现了三种不同的操控方式
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
机器人和变位机怎么协调运行
搬运机器人总体设计的思路及原理

ai人工智能机器人
profinet转ethernet网关连接发那科机器人配置案例
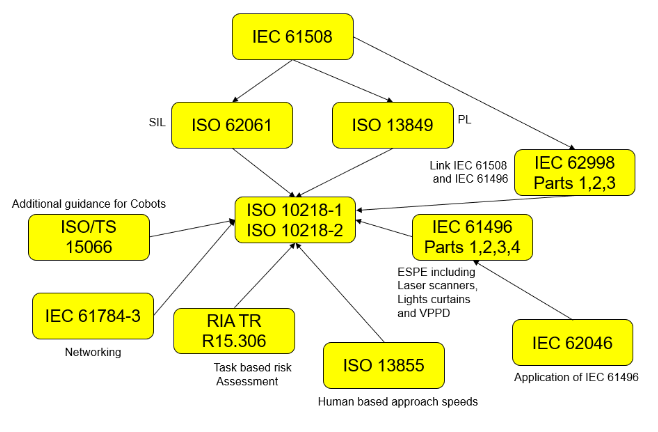
与工业机器人、协作机器人和移动机器人最相关的功能安全标准





 工商网监
工商网监
评论