 可以自主学习的智能汽车 自适应应用当前面临的挑战
可以自主学习的智能汽车 自适应应用当前面临的挑战
汽车行业一直有着一个宏伟目标,其重要性甚至远超自动驾驶汽车的开发,那就是零死亡与零事故。整个行业都在朝这个目标努力。要实现这个目标,就需要将人为错误减少到最低程度,甚至使之完全杜绝,这反过来又说明,网联全自动或半自动驾驶汽车必须能够学习和分析当前的驾驶状况和以前的驾驶行为。自适应机器学习应用有助于评估驾驶状况,将这些状况与之前发生过的状况进行比较,并使行之有效的行为模式适应新的环境。
网联汽车的自适应应用
自适应应用是指高精度 GNSS、转向、制动、加速和减速之类的应用,这类应用可通过车载传感器进行快速调整,从而控制车辆的位置或实现其他一些期望的结果。它们可以从传感器数据中得出结论,以便对特定情况进行学习,然后在将来做出适当响应,这一过程就像驾校教练指导学员开车一样,这样一来,它们最终就可以自己做出决策而实现自动驾驶。
在自适应应用中,就像在工业市场中采用机器学习技术一样,车辆会从高计算能力的资源丰富的后台那里接收人工智能 (AI) 信息。当将这些数据与来自车辆传感器的数据结合起来时,车辆就会学习如何快速适应并运转。在这种情况下,网络就好比是驾校教练,将知识传授给车辆。如果车辆以后再遇到类似情况,它就会知道该怎样做——例如,在接近道路施工位置时自动减速。根据这些经验和后台AI通信的支持,就可以构建起一个智能数据库,并与其他车辆共享,这样就可以改善驾驶员的人体反应时间,并使车辆迅速采取措施。
机器学习之所以重要,是因为车辆必须具有适应能力。它们不可能始终都对所有的传感器数据进行监控和计算,然后将其用作预测的依据,因此驾驶行为和环境条件的变化有一部分必须从学习到的情况识别出来。
自适应应用的要求
如果要在网联汽车的自适应应用中采用机器学习,那么有几项要求就必须符合。最重要的就是通过远程信息控制单元 (TCU) 发送卫星数据的高精度GNSS导航系统。换句话说,如果要使车辆能从其环境中进行学习,那它就需要知道自己的确切位置。尽管许多汽车都已经配备了导航系统,但是要运行各种新功能,例如车道保持辅助技术,那么这类系统中的大多数对未来的ADAS/AD应用来说都还不够精确。例如,如果由于为建筑工程腾出空间而发生了变道,那么当前的GNSS系统不一定会将这一信息发送给车辆。
在全自动或半自动驾驶汽车中,这种不一致是不可接受的。将高精度GNSS或其他卫星的信息与IVN传感器融合及后台AI所提供的通知相结合,就可以让汽车清楚地了解自己的位置,以及即将发生的情况。它必须要能测量另外两辆车之间的确切距离,从而确定是否可以从它们之间安全通过,也就是说不仅要知道自己的位置,还要能确定别的车辆的位置。
因此,自适应应用还将在传感器共享方面发挥重要作用,在这方面,汽车会学习从其他车辆获取数据,然后使用“后台”来得出自己的结论并做出预测。
后台是网联汽车的“外部大脑”
汽车本身不可能加入太多算力。由于它会获得新知识,因此就必须让它将这些知识通过TCU反馈给所谓的后台,同时,这个后台也会从许多别的汽车那里收集大量数据,这样就能告诉汽车有诸如新的施工或交通规则变更之类的事情发生。
反过来,汽车则可以验证或者拒绝此类信息,这本身就是一个学习的过程。谷歌地图在一定程度上就已经在做这项工作了,那就是通过采集手机用户的位置数据来识别交通拥堵状况,然后实时地将这一信息添加到地图中。汽车必须具有适应能力,它们并没有充分的算力来持续不断的监控并处理传感器数据以及变化中的环境数据、从过去或者预测的场景中学习,然后再做出预测。反过来必须不断适应转向、制动和加减速上的变化。
为了从后台获得数据,车辆就需要经过安全认证的、快速而又可靠的数据连接,使其整合起车载的传感器并根据这些传感器提供的数据来验证转向运动。汽车以太网提供了充分的带宽,在适当的时机将数据送达正确的位置。然而,对于是否只有汽车以太网才能胜任这项工作,目前尚不明了。大致说来,只要提供一条快速可靠的通信链路,类型不限,就可以让系统来监控交通状况并缩短延迟时间,这样就可以根据需要来快速的传输数据。以太网配备了许多标准化的先进工具,可以做到这一点。
目前的每一家OEM都设置了自己的后台,但以后制造商可能会相互合作,并与谷歌、亚马逊和微软之类的外部提供商一起来提供新的SaaS应用,带来更好的驾驶体验。企业的发展环境仍处于不断变化之中,还需要数年的时间才会最终敲定下来。
改善人体的反应——一些范例
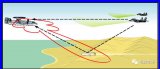
机器学习和自适应应用并不是什么科学幻想;现在的许多应用都可以增进驾驶员的安全性与舒适度(图1)。
图1可以采用自适应应用的应用范例:停放的卡车遮挡了其他道路使用者的视线。在这类情况下,防碰撞系统可以减轻人体反应时间上的局限。(图片:莫仕)
这些应用可以执行一些简单的任务,例如识别并避免发生事故及其他危险、提供备选路线,以及自动泊车。车道偏离预警技术之类更加先进的应用业已存在,但对于更快的速度、以及在雨雪和视线或视野 (FOV)受遮挡之类的众多环境因素下,这些应用还未成熟或者精确到足以为驾驶员提供全面的保护。随着我们不断开发出更加精确并且可以识别的绝对定位数据,这种情况未来会发生改变。
高精度定位和车道保持技术在许多情况下都会发挥重要的作用。如果大雨或大雪使道路能见度降低,那么驾驶员或许就不能根据路标或其他环境因素来认路,而机器学习则会发挥重要的作用,帮助驾驶员正常行驶。以后,后台以及网联汽车传感器提供的绝对定位数据将使汽车能够分析并适应道路状况、了解自身所在的具体位置,并且稳稳的保持好车道。
其他自适应应用还包括对道路标志的识别与学习。例如,车辆可以检测到道路施工造成的限速的变化,然后加以回应。为了做到这一点,汽车必须懂得相应标志上数字的含义,以及如何对这些数字做出响应——也就是调整最大车速,或者从后台获得人工智能的预测信息,这类信息会告诉汽车限速已经发生变化,并且“记下”之前存在的限速。
自适应技术还可用于车辆的照明。驾驶员往往会忘记正确设置好大灯。此外,如果车灯并没有正确的照亮路面,造成驾驶员难以看清迎面而来的车辆和其他物体,那么转向也会存在问题,而且这也会使道路上的其他驾驶员暂时失明,或者产生其他与车灯有关的不利影响。
自适应应用可以确保始终根据变化中的环境状况和车辆的物理条件,来相应的对大灯进行调整,而且车灯的光束也会一直指向车辆的运动方向,避免干扰到其他车辆以及导致道路照明不佳。这样就提高了驾驶员的能见度,因而增进了安全性。
随着车辆的自动化程度日益提高,我们正在探索的高级应用也会愈发的重要起来。当今全自动驾驶汽车的行驶速度相对较低,在提供了地理围栏、车辆已经熟悉的区域中,最高车速要低于每小时56-73公里(35-45英里)。这当然需要进一步的提高,但是在高速行驶过程中,如同驾驶员一样,软件的反应时间也会缩短,而当前的响应速度并没有快到足以保证安全。例如,目前在更高的车速下,IVN摄像头的传输速度和相关数据的处理速度可能并不足够保证安全。
车舱内传感这种高级应用适合驾驶员遇到健康问题、身体疲劳或者精力不能够集中的情况;传感器激活后,汽车就可以限制驾驶员对方向盘或其他必要驾驶功能的操作。在较低级别的自动驾驶中(3级),驾驶员仍被看作是自动驾驶系统“可以依靠的选项”,因而这一功能意义重大。然而,驾驶员的分心却会影响到安全性。这样一来,传感器就会阻止驾驶员接管方向盘及进行其他有关的驾驶操作。
自适应应用当前面临的挑战
在为网联汽车及全自动或半自动驾驶汽车开发并集成自适应应用的过程中,成本是最大的问题。这些应用极为复杂,因而无法实现成本效益。即使是现有的应用也非常昂贵,所以,如果要使机器学习和自适应应用发挥作用,重要的一点就是要降低价格。
另一个挑战在于缺少通信标准。DSRC、Wi-Fi、5G还是其他系统的组合——对于会有哪些国际频带来实现网联汽车之间的通信,目前尚不明朗。这场竞赛中还存在着许多的可能性,而新冠病毒病和日益恶化的经济形势也使大家对达成协议不那么重视了。
我们下一步走向何方?
对于包括OEM、供应商、驾驶员和乘客在内的每个相关方来说,安全性都至关重要。在实现零死亡与零事故这个目标的过程中,人人都要起到一定的作用,而且我们要尽快实现这一点。单单在德国,2019年就有3,059人死于道路交通事故,而在美国,同一年则有38,800人失去了生命。非常重要的一点就是要确定好我们对安全性、自适应应用和机器学习的重视程度。
在自动驾驶汽车上安装这些系统代价不低,但却物有所值。我们必须与其他行业部门合作,例如航空、物流、防务,甚至还有游戏和无人机的制造商,这样才会有机会来相互学习,一起来分享经验并分摊开发成本。为了实现共同的目标、采用技术来弥补人为错误并使道路事故和伤亡不再发生,OEM和供应商就必须跳出常规思维的桎梏,开展合作,或许在其他行业中也要做到这一点。
编辑:hfy
-
传感器
+关注
关注
2522文章
47987浏览量
739719 -
智能汽车
+关注
关注
30文章
2600浏览量
106372 -
自动驾驶
+关注
关注
773文章
13002浏览量
163138
发布评论请先 登录
相关推荐
基于非线性自适应学习控制器的四轴飞行器避障方案
什么是自适应光学?自适应光学原理与方法的发展
【换道赛车:新能源汽车的中国道路 | 阅读体验】1.汽车产业大变局
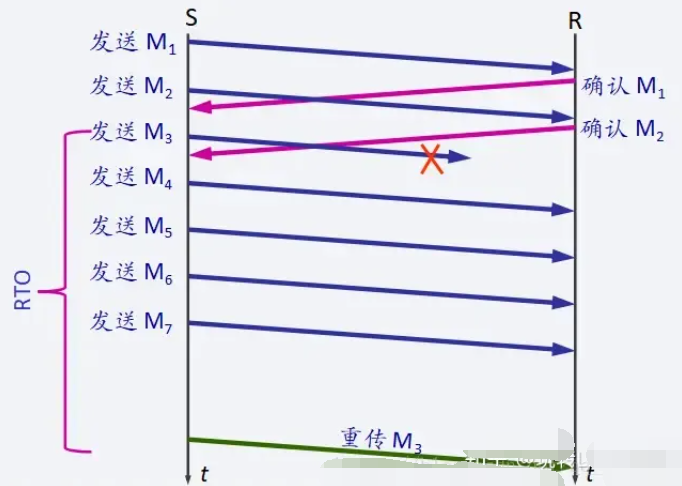
TCP协议技术之自适应重传

无监督域自适应场景:基于检索增强的情境学习实现知识迁移

LabVIEW开发自适应降噪ANC
机载雷达空时自适应处理技术





 工商网监
工商网监
评论