 无人机设计ESC以及市场开发解决方案
无人机设计ESC以及市场开发解决方案
无人机设计的关键是能够控制电动机的速度和旋转。大多数无人机由无刷直流电动机提供动力,这需要不断调节速度和旋转方向。电子速度控制(ESC)模块执行这些功能,并包括电源级,电流感测电路,微控制器以及与飞行控制系统的通信接口,因此使其成为无人机的基础。本文介绍了在设计ESC以及市场开发解决方案时要考虑的重要因素。
ESC的设计需要对特性进行仔细的评估和分析,总结如下:
无人机上可以安装两种类型的无刷电动机:无刷直流电动机(BLDC)和无刷交流电动机(BLAC),也称为永磁同步电动机(PMSM)。使用哪种类型的电动机的选择受所选控制算法的影响,该算法可以是梯形控制或磁场定向控制(FOC)。梯形电动机控制算法具有以下主要特征:
- 基于六相开关序列的电机控制
- 检测转子的磁角,用于设置正确的角度;每一步对应一个60°角
- 在无传感器控制系统中,通过测量反电动势相电压来估算开关角度
- 另一方面,FOC控制算法具有以下功能:
- 通过正弦相电压或电流(FOC)进行电机控制
- 转子角度检测的最小精度为1°至5°,这确保算法始终能够提供最大扭矩
在无传感器控制系统中,电动机的磁角是根据电动机的相电压和电流来估算的。它的位置是通过监视电动机的某些电气参数来确定的,而无需使用其他传感器。无人机中最常用的类型是无刷直流电动机,这是由于其体积小,成本相对较低以及耐用性和鲁棒性高。
大多数无人机至少有四个电机,其中最常用的是四电机版本。ESC负责控制每个电动机的速度,因此,最常见的无人机架构涉及为每个电动机专用的ESC。所有ESC都必须能够通过飞行控制器直接或间接地相互通信,以便易于控制无人机。每个电动机旋转的方向也很重要:在四轴飞行器中,一对电动机沿一个方向旋转,而另一对电动机则沿相反方向旋转。
ESC制造商最常用的电动机控制技术是磁场定向控制,即一种控制电动机转矩和速度的技术。如果正确实施,FOC甚至可以处理快速的加速度变化而不会产生不稳定性,从而使无人机能够执行复杂的机动,同时最大程度地提高效率。
下面的图1中的框图显示了一个FOC架构,其中包括以下组件:
- 电流控制器由两个积分比例控制器组成
- 可选的外部环路速度控制器和参考电流发生器
- Clarke,Park和Inverse Park变换可用于从固定帧到旋转同步帧的转换
- 一种空间矢量调制器算法,可将vα和vβ命令转换为应用于定子绕组的脉宽调制信号
- 保护和辅助功能,包括启动和关闭逻辑
如果需要无传感器控制,则可选观察者来估计转子的角位置
图1:面向字段的控制框图(来源:Mathworks)
设计FOC的电机控制工程师要执行多项任务,包括使用两个用于电流回路的PI控制器开发控制器架构,优化所有PI控制器的增益以满足性能要求,以及设计空间矢量调制器来控制PWM。
一旦选择了控制算法(梯形或FOC),下一步就是在开环或闭环控制系统之间进行选择。在开环控制中,同步电动机(BLDC或BLAC)通过控制信号驱动,并假定遵循命令的控制动作。在闭环控制系统中,电路能够检查电动机是否按预期运行。如果不是,则控制系统会通过减小或增大电流来自动补偿过度运动或运动不足。
使用闭环或开环(无传感器)控制系统时,必须测量电流和电压以用作反馈信号。图2显示了适用于梯形和正弦控制系统的典型测量设置。通过将梯形控制与无传感器算法结合使用,无传感器算法将使用三相电压来计算转子角。
图2:具有无传感器电机控制的ESC。右边是德州仪器(TI)的无人机ESC的高速无传感器FOC参考设计,而左边是其框图。(来源:德州仪器)
四旋翼动力
无人机的机械简单性和空气动力学稳定性与电动机及其操纵的协调使用有关。在四轴飞行器中,位于结构对角线上的一对电动机沿与其他两个电动机相同的方向但相反的方向旋转。如果所有四个电机都以相同的速度旋转,则无人机可以爬升,下降或保持水平飞行。如果对角线的旋转速度快于另一对角线,则无人驾驶飞机将绕其重心旋转并保持在同一水平面内(图3)。
图3:无人机使用转子速度的不同组合来执行机动。(来源:意法半导体)
如果您更改头(或尾)旋翼的速度,则无人机将像固定翼飞机向下俯冲那样指向上方或下方。左右扭矩调整将导致无人机滚动,使其绕其轴旋转。由无人机的飞行控制系统来改变合适的旋翼的速度,以达到完成所需机动所需的飞行高度。
对于控制工程师而言,速度校正是一个常见的控制回路反馈问题,可通过比例积分微分(PID)控制器解决。
设计电调
为无人机设计ESC时,需要专门设计用于控制高RPM电机(12,000+ RPM)的高质量组件。德州仪器(TI)开发了一个名为InstaSPIN的MCU系列,可简化三相电机控制应用程序的设计。适用于无传感器系统的InstaSPIN-FOC具有快速软件编码器,该软件编码器具有适用于任何三相电动机的转矩和速度控制。InstaSPIN-MOTION适用于无传感器系统,可为任何三相电动机提供位置,速度和转矩控制。
TI提供了这些示波器的完整参考设计,其中包括InstaSPIN-FOC和InstaSPIN-MOTION电机控制技术。该平台包括一个32位TI C2000 InstaSPIN微控制器。它使开发人员能够识别,自动调节和控制三相电动机,从而快速提供稳定且功能强大的电动机控制系统。
STMicroelectronics提供了完整的ESC参考设计,实现了无传感器FOC算法。STEVAL-ESC001V1 ESC参考设计适用于入门级商用无人机设计,并驱动由6S LiPo电池组或任何等效的直流电源供电的任何三相无刷电动机(或PMSM),峰值电流最高为30A。STEVAL-ESC001V1借助完整的预配置固件包(STSW-ESC001V1),使设计人员能够快速开发其应用,并实现了无传感器的磁场定向控制算法,该算法具有三路电流读数,速度控制和完全主动制动功能。STSW-ESC001V1固件/软件包以及STM32 PMSM FOC软件开发套件MC库允许通过作用于STM32 MCU中嵌入的FOC参数来优化ESC设计,并利用ST电机分析器快速检索相关的电机参数。意法半导体的无传感器FOC算法可适用于任何三相BLDC或PMSM电机应用,提供更长的飞行时间和最佳的动态性能(图4和5)。
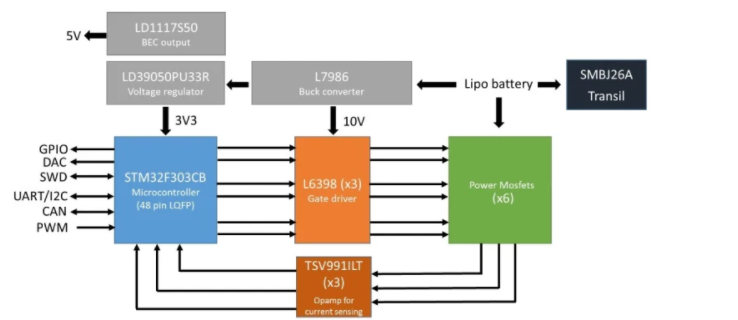
图4:意法半导体的STEVAL-ESC001V1解决方案的框图(来源:意法半导体)
图5:意法半导体的STEVAL-ESC001V1板(来源:意法半导体)
该HoverGames无人机开发平台,可用于构建任何自主车型,从无人机和流浪者无人机模块化和灵活的恩智浦的硬件/软件解决方案。该开发套件主要基于具有Linux和Open CV的微处理器以及各种用于指导飞行的传感器。
飞行控制器确保无人机保持稳定。该开发板是开源的,可以插入其他外部传感器以根据功能优化操作。
必须使用IoT连接之一来实现LiPo电池和特定国家/地区的遥测无线电。要获得套件的全部功能,您将需要选择要购买的两个遥测无线电中的哪一个。通过遥测,您可以在飞行过程中与车辆进行实时连接,并可以在飞行过程中查看无人机的状态,进行装载,控制自主航路点并进行必要的更改。遥测数据被发送到控制站,但也被存储在飞行单元的机上。
套件组件还包括DC-DC电源模块,带底座的GPS NEO-M8N模块,安全开关,蜂鸣器,明亮的RGB状态LED,SEGGER J-Link EDU Mini / FTDI USB-TTL-3V3电缆/带电缆的调试分线板,BLDC无刷电动机2212 920 kV和ESC电动机控制器40 A OPTO(图6)。
-
电磁兼容性
+关注
关注
6文章
341浏览量
33509 -
ESC
+关注
关注
0文章
51浏览量
17419 -
无人机
+关注
关注
224文章
9881浏览量
174793 -
PI控制器
+关注
关注
1文章
25浏览量
11259
发布评论请先 登录
相关推荐
如何利用无人机物联卡实现无人驾驶飞行
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程
第一集 知语科技无人机反制技术与应用--无人机的定义与分类
知语云智能科技揭秘:无人机威胁如何破解?国家安全新防线!
知语云智能科技:反制无人机新篇章—全景监测与激光打击的尖端技术
无人机全景监测:空域管理的新革命
震撼发布!知语云智能科技引领革新,全景反制无人机系统破茧而出!
四旋翼无人机飞行原理【其利天下无人机方案开发】

什么是无人机图传系统?无人机图传系统的构成







 工商网监
工商网监
评论