 博力实多机器人联动饼干码垛装箱生产线方案及机器参数详情
博力实多机器人联动饼干码垛装箱生产线方案及机器参数详情
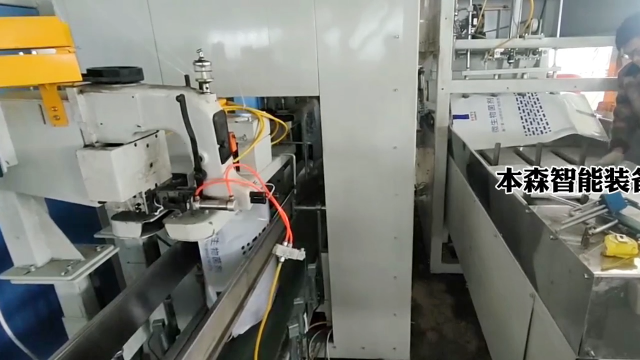
通过视觉定位,每次拾取1块φ60mm的饼干码垛进纸箱中,控制系统根据视觉检测的拾取物位置数据,自动进行五台机器人的任务规划。
工作环境:高温≤ 40℃
定位原理:视觉定位、动态跟踪拾取、定点放置
定位精度:±0.1mm
机器人数量:5台
工作节拍:单台 160次/分钟
负 载:0.5kg
责任编辑:xj
原文标题:博力实多机器人联动饼干码垛装箱生产线方案
文章出处:【微信公众号:工业机器人应用方案】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27025浏览量
201377 -
码垛机器人
+关注
关注
2文章
276浏览量
11245
原文标题:博力实多机器人联动饼干码垛装箱生产线方案
文章出处:【微信号:jiqirenyingyong,微信公众号:jiqirenyingyong】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐



码垛机器人纸箱码垛优势
随着科技的不断进步,越来越多的行业开始引入机器人技术以提高生产效率和降低成本。在物流、仓储和制造业中,码垛机器人已成为不可或缺的一部分。特别是在纸箱




稳石机器人|日化行业智慧物流:打造高效绿色供应链
运输过程中带来的产品的损坏,突破了产品生产效率和产能瓶颈。”
稳石机器人为全球知名日化企业打造自动化上下料解决方案。产线利用稳石机器人提供的
发表于 09-21 13:45
如何快速地让机器人投入生产
重复使用。按功能以生产线设备,机器人设备如此整理后,可以形成一个函数库。加上c语言的mach函数库,并整理一个三角函数库后。我们的设备就可以通用了。上什么生产线都没问题。不要太依靠示教器,以及各种
发表于 06-06 16:18
生产线的维护和机器人的维护
改造好生产线,不是就完了,如果维护不了,客户可能退货。
设计生产线时,凡是io口,都要留单独的控制开关。便于维修控制。
强停,要设计流水线停,和单机强停。
一定要造好使用,维护手册,匆忙上线,只会
发表于 05-20 11:44





 工商网监
工商网监
评论