 研究人员已成功研发出一种新型的磁驱动高速软体机器人
研究人员已成功研发出一种新型的磁驱动高速软体机器人
据国内媒体报道,《通讯-材料》最新发表了一篇技术研发成果论文,研究人员已成功研发出一种新型的磁驱动高速软体机器人,这种机器人可以行走、游泳、漂浮和捕捉活体苍蝇。
这种机器人外形如同纸张,可以做到薄如蝉翼。材料内部被嵌入了微小的磁体,无需电力驱动,可以根据磁场变化进行形状、动作的变化。
论文通讯作者Denys Makarov及其团队在论文中展示了磁驱动高速软体机器人的设计原理、材料和制作工艺。
他们在机器人体内嵌入微小的磁体,能快速响应磁场,实现了迄今最高的比能量密度,这对于低磁场下的高速驱动很关键。
在实验示例中,重23mg、厚200um的四臂机器人在3.7mT磁场作用下漂浮;蝠鲼形态的机器人可以在水中运输物品,尺寸为17mmx19mm,厚度80um;一个六臂机器人可以抓取、运输和释放无磁性物体,直径20mm厚度80um。
一个花形机器人在一只苍蝇触发陷阱后捕捉了它,随后张开磁驱动的八臂释放了它,其直径25mm,厚度200um。
责编AJX
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
26965浏览量
201283 -
人工智能
+关注
关注
1775文章
43693浏览量
230480
发布评论请先 登录
相关推荐
用于水质和病毒监测的电驱动软体机器人开发
微小型软体机器人是近年来机器人领域的重要分支,在狭小空间工程探索、生物体内药物递送、体内医疗诊断等领域扮演着重要角色。

LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核
发表于 12-21 20:03
用全志R128复刻自平衡赛车机器人,还实现了三种不同的操控方式
更上一层楼。
硬件设计
本项目中的自平衡赛车机器人的硬件设计结构非常简单,硬件部分主要由R128开发板和几个驱动模块组成。
供电模块
自平衡机器人采用锂电池供电的方式,并利用mi
发表于 12-20 10:22
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递
发表于 11-30 16:01
ai人工智能机器人
的进行监控管理。
智能电话机器人的另一个优势是不知疲倦,不需要休息和喝水,不需要休息。人在工作时就会有各种各样的脾气,但智能电话机器人不会,永远都以最严谨、最周到的态度和客户进行沟通。
在科技
发表于 09-21 11:09

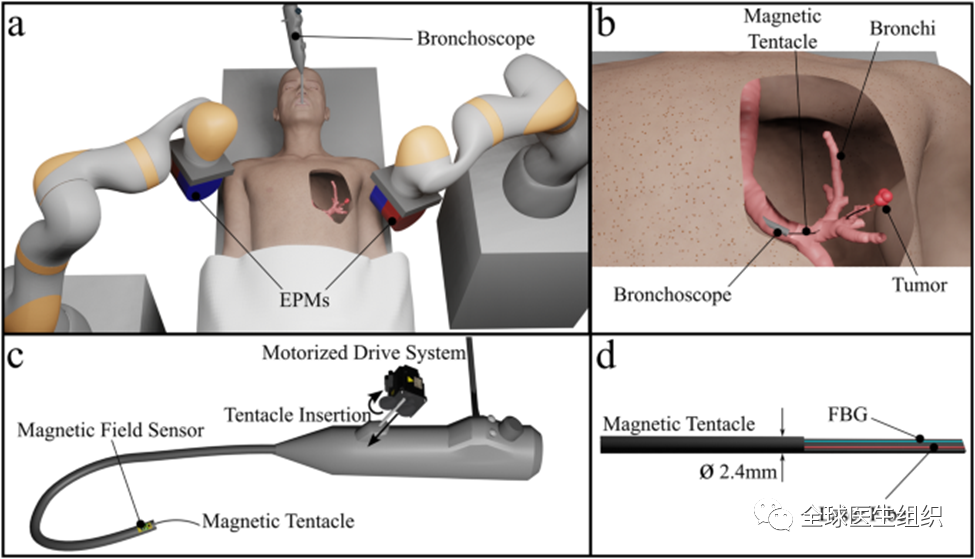
2毫米微型磁控机器人有望改变癌症检测和精准治疗
英国利兹大学研究人员成功研发出一款仅有2毫米直径的微型磁控机器人(如下图),能够深入到肺部进行癌症检测和精准治疗。
发表于 08-02 09:49
•492次阅读
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
,移动机器人导航技术大致可分为以下几种:
01激光导航
激光导航分为激光反光板导航与激光自然导航两种方式:
1、激光自然导航
激光自然导航是一种无需使用反射板的自然导航方式,它不再需要通过辅助导航标志(二维码
发表于 06-28 09:52
超能机器人成功入选2022年度第四批湖南省新型研发机构
日前,湖南省科技厅公布了2022年度第二批(总第四批)拟备案和培育的新型研发机构名单,湖南超能机器人技术有限公司(以下简称:超能机器人)榜上有名,也是目前湖南省唯一一家服务

装配的学问和机器人工序的联系
举个例子来说,里面有弹簧的,很不好装,必须有几个舌头压着。如果你没装过,那肯定机器人也装不出来。所以,有基层打工经验也是一种很好的知识,尽管老板不要求,但阅历决定了成功的难度。
比如我,程序写得可能
发表于 06-09 12:55
如何快速地让机器人投入生产
不能完成的技巧性的工作。
所以机器人是一种模拟人手的技巧性设备。它的主要内容就是。
绕
转
穿
钳
拿
放
给
总之,它的主要内容就是研究人手的基本动作。
而研究人手的动作的主要内容就
发表于 06-06 16:18
浅谈儿童陪护机器人
机器人的长期稳定运行。对于控制算法的实现,可以采用PID控制器或者模糊控制器,以达到更加精准的控制效果。
最常见的是TB67S249FTG芯片,它是一种适用于双极性步进电机的驱动芯片,采用了先进
发表于 05-11 15:12





 工商网监
工商网监
评论