 ORB_FPGA单层图像金字塔的ORB特征提取方案分析
ORB_FPGA单层图像金字塔的ORB特征提取方案分析
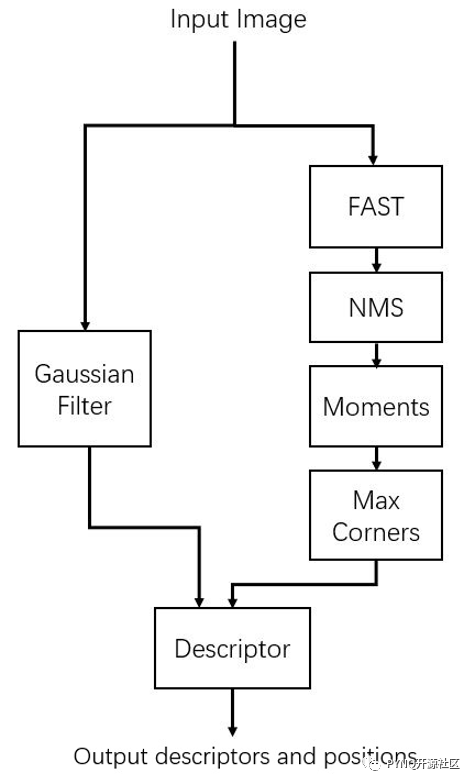
ORB特征是一种图像识别、追踪和匹配中常用的特征,大名鼎鼎的ORB-SLAM就是使用的这一特征。它提取FAST特征点,并通过特征点附近的窗口矩计算特征点的方向,含方向的FAST特征也被称为oFAST特征。对提取到的oFAST特征,进一步计算BRIEF描述子。ORB特征包含了两部分,一是特征点位置,二是它的BRIEF 256位描述子。
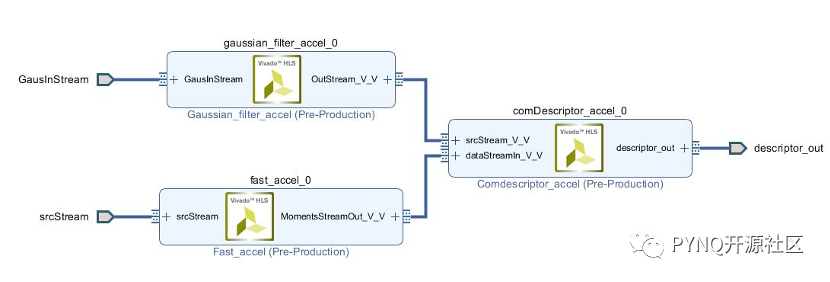
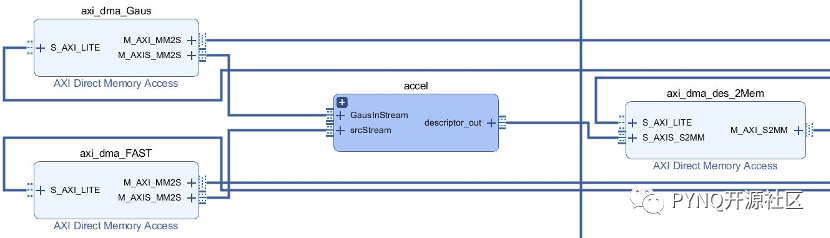
加速器结构,输入输出都是AXI-Stream接口
上图为图像加速部分的工程示意图。这里同样使用了HLS编写的加速IP采用AXI-Stream数据接口,数据接口与DMA首尾相连,只要控制DMA就可以驱动它。
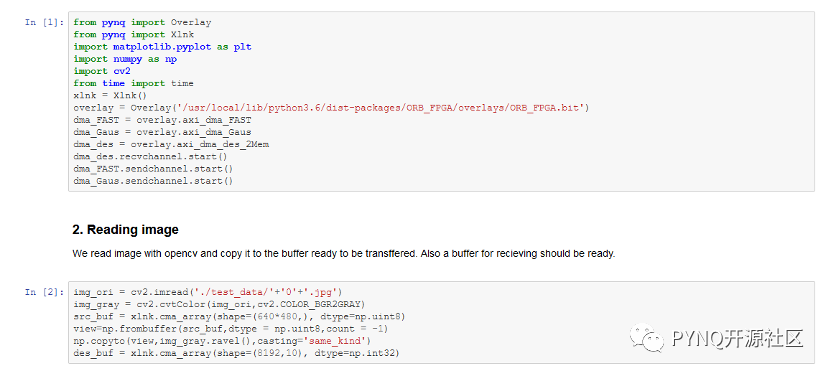
总体工程
本项目的例子输入是SD卡中保存好的图片,当然也可以自己从摄像头读取图片。
快速开始
运行下面这条命令即可快速安装:
sudo pip3 install git+https://github.com/Siudya/ORB_FPGA.git
项目演示
安装好以后打开ORB_FPGA/ORB_FPGA..ipynb
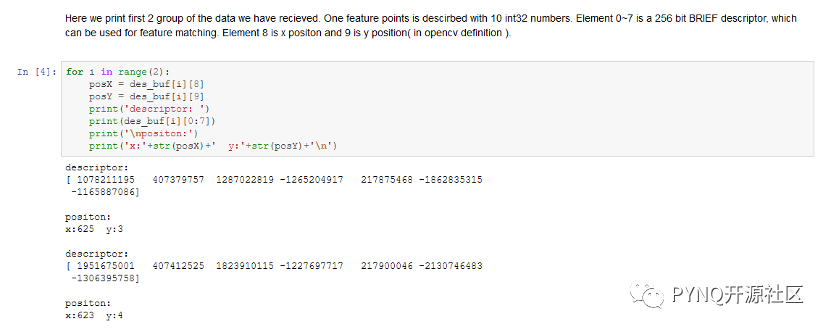
这里可以打印前两个特征点的内容。可以看到前8个32位数是描述子,后两个是坐标。
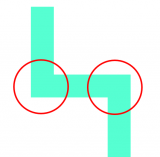
把特征点画在原来的图像上,可以看到检测出的特征点大部分是角点和边缘点。这实际上和FAST特征是一致的,但是FAST特征不包含描述子。
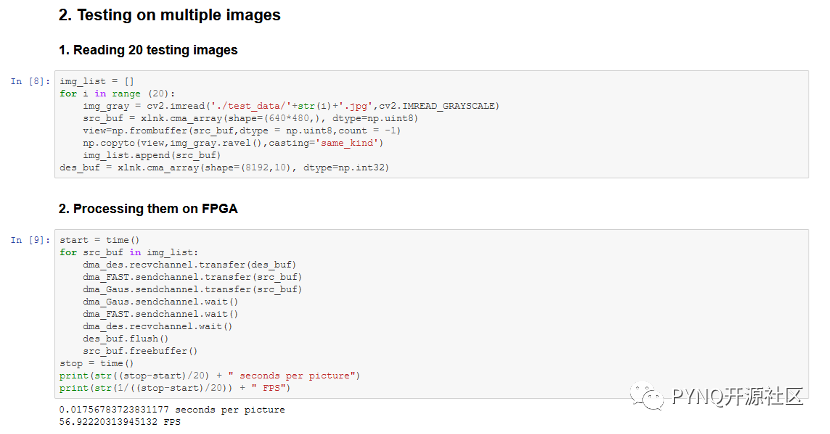
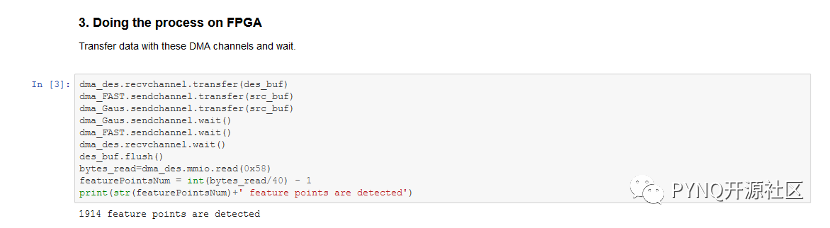
接下来读取更多图片来看看吞吐量如何。这里读取了20张图片,统统送入加速器加速,可以看到帧数可以达到56帧。
项目中也提供了纯软件测试的可执行程序,可以直接运行。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
FPGA
+关注
关注
1602文章
21309浏览量
593130 -
cpu
+关注
关注
68文章
10437浏览量
206527 -
图像识别
+关注
关注
8文章
447浏览量
37907 -
orb
+关注
关注
0文章
21浏览量
9852
发布评论请先 登录
相关推荐
工程实践中VINS与ORB-SLAM的优劣分析
ORB-SLAM是一种基于特征的单目视觉SLAM系统,广泛用于实时三维地图构建和机器人定位。该系统使用ORB特征进行高效的视觉识别和地图重建,支持关键帧技术和回环检测来优化地图的准确性

OpenCV4图像分析之BLOB特征分析
BLOB是图像中灰度块的一种专业称呼,更加变通一点的可以说它跟我们前面二值图像分析的联通组件类似,通过特征提取实现常见的各种灰度BLOB对象组件检测与分离。使用该检测器的时候,可以根据

LabVIEW开发自动驾驶的双目测距系统
基于LabVIEW的双目测距系统。LabVIEW是NI公司的可视化编程软件,它具有强大的数据处理和图像分析能力,能够实现高效的图像处理和匹配算法。
该系统通过灰度值金字塔算法进行
发表于 12-19 18:02
机器视觉的图像特征提取技术分析
区域和轮廓只包含对分割结果的原始描述,在实际应用中我们还需要从区域或轮廓中确定一个或多个特征量。这些确定的特征量被称为特征。
发表于 11-03 11:28
•230次阅读


基于卷积神经网络的双重特征提取方法
机器学习技术已被广泛接受,并且很适合此类分类问题。基于卷积神经网络的双重特征提取方法。提出的模型使用Radon拉冬变换进行第一次特征提取,然后将此特征输入卷积层进行第二次特征提取。
发表于 10-16 11:30
•434次阅读

基于英特尔开发套件使用ORB-SLAM3实现无人机实时定位
工业建模对于精度有着高要求,这意味着无人机的 SLAM 算法要提供可靠的实时位姿估计。ORB-SLAM3 是目前融合双目视觉与 IMU 的优秀算法,其前端是针对实时性优化的 ORB 描述子与关键帧
电路块ANB指令与ORB指令操作
一、ANB.ORB指令 在梯形图中,可能会出现电路块与电路块串联或者电路块与电路块并联的情况,这时就要使用ANB指令或ORB指令。ANB指令称为“电路块与指令”,其功能是使电路块与电路块串联。ORB
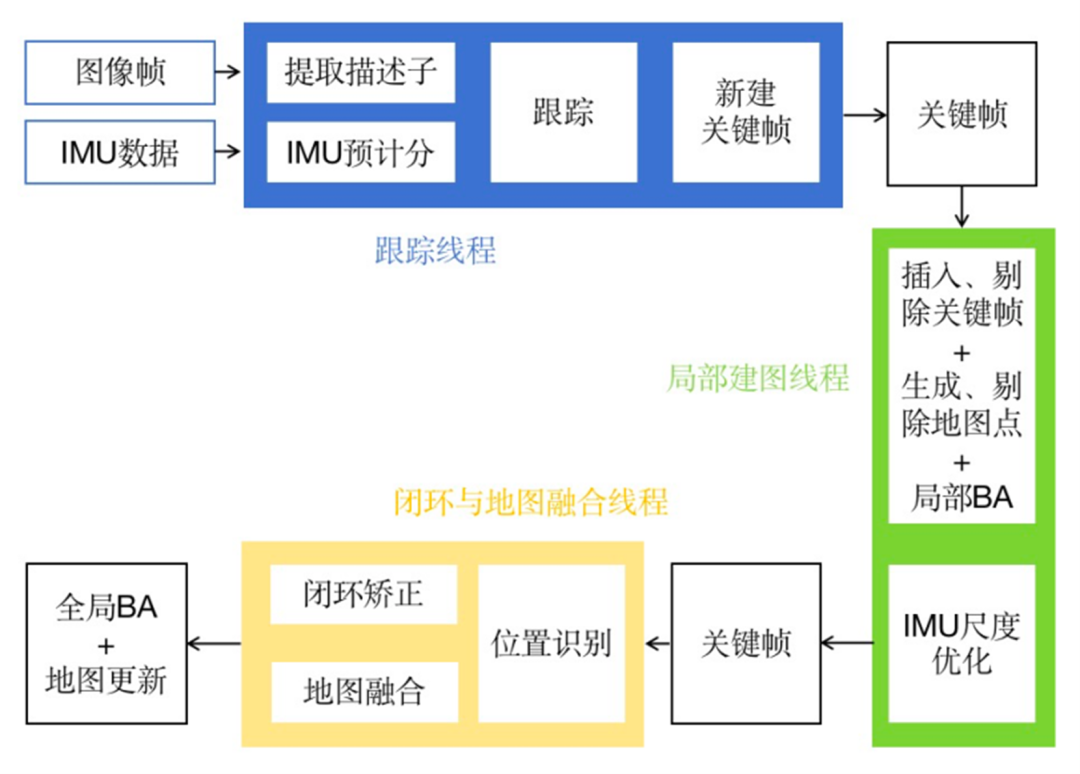
ORB-SLAM3整体流程详解
与ORB-SLAM2相比,ORB-SLAM3在处理大视差和长时间未观测到的场景时效果更好。它还提供了更准确的帧间运动估计和更快的处理速度。

人体分割识别图像技术的原理及应用
、行为分析等功能。 人体分割识别图像技术的原理主要包括三个步骤:图像预处理、人体分割和特征提取。首先,通过图像预处理算法对人体
为什么目前落地的主流SLAM技术很少用神经网络进行特征提取?
深度学习提取的特征就一定好?显然不是的。因为数据集的原因,利用深度学习训练出的特征子适用性并不一定好。貌似网上有一篇论文,利用orbslam框架,对比了orb和superpoint的效

持续在榜的RAFT-Stereo,你确定不来了解吗?
给定一对矫正后的图像(IL, IR),目标是估计一个视差场d,使每个IL中的像素都有水平的位移。与RAFT类似,RAFT-Stereo的方法由三个主要组件组成:特征提取器、相关金字塔和基于GRU的更新运算符,如图1所示。更新运算






 工商网监
工商网监
评论