 机器人离线编程技术的最新消息
机器人离线编程技术的最新消息
随着工业机器人行业应用领域的不断扩张,促使机器人行业应用软件的工艺性越来越强,从目前中国工业机器人应用分布领域来看,主要集中在焊接、喷涂、装配、包装、码垛搬运、抛光打磨等领域。
以焊接市场为例,据高工机器人产业研究所(GGII)数据显示,2019年中国焊接系统集成市场规模218.20亿元,随着高端制造需求日益增长,焊机机器人市场有望进一步乘风而起。预计到2023年中国焊接机器人市场将超过8.5万台,年均增速超15%。
但机器人需求的增长,并没有带动机器人变得简单、易用。此外,雕刻、切割、3D打印等领域工件日益复杂多样,对精细化作业的要求也越来越高,传统的示教编程方法已经无法适应该类机器人复杂应用的需求。
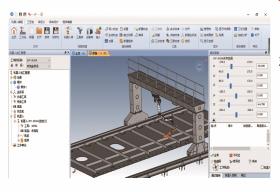
与此同时,为解决示教编程带来的诸多应用难点问题,机器人离线编程技术应运而生。它利用计算机技术,建立起机器人及其工作环境的几何模型,通过对图形的控制和操作,在离线的情况下进行机器人轨迹规划。
专注于机器人离线编程软件的司普禄软件科技(昆山)有限公司(以下简称“司普禄”),在9月15日-19日的上海工博会上,展示了SprutCAM离线编程软件的最新版本SprutCAM 14及其在雕刻领域的应用案例,现场吸引了不少厂商及观众的围观。
“将SprutCAM离线编程软件与国产DAYE机器人相结合,无需借助任何第三方CAM软件,在SprutCAM平台,从数据导入到输出代码实际加工,可形成一站式编程解决方案,进一步提升机器人产线的生产效率。”司普禄总经理齐陈鹏表示。
俄罗斯SprutCAM软件自1997年发布以来,经历了从SprutCAM 1到SprutCAM 14版本的迭代升级,软件性能不断优化提升。今年5月推出最新SprutCAM 14版本,新增轨迹点分布和速度编辑功能,有效解决了机器人卡顿、抖动等常见问题,大大提升了机器人编程效率及机器人的易用性,广受客户好评。
在本次工博会上,司普禄还正式推出了“RobotX”机器人离线编程软件平台,该产品由司普禄和俄罗斯SPRUT TECHNOLOGY公司联合开发。据了解,“RobotX”机器人离线编程软件平台具有以下优势:
1、简单易用,轻松上手; 2、物美价廉,极致性价比; 3、兼容所有CAD/CAM软件; 4、兼容所有机器人和控制器; 5、支持多机多通道。
“RobotX”机器人离线编程软件平台工作步骤
“相较于上下料、拆码垛等简单场景的应用,司普禄的机器人离线编程更适用于‘机器人加工’范畴,比如雕刻、切割、3D打印、喷涂、锯切、焊接、淬⽕、去⽑刺、打磨、抛光、滚边、热线切割、熔覆、清洗、喷砂、喷丸、⼑⽚割铣、修边、涂胶、堆焊、批量钻孔、铣削等高端机器人系统集成项目的应用。”齐陈鹏透露,截至目前司普禄已服务200+工业客户。
2019年,在全国机器人产业下行的大环境下,司普禄仍逆势上扬,机器人离线编程产品销量相较于2018年翻番。对于2020年的业务发展,司普禄将持续推广扶持机器人系统集成商的“春笋计划”,继续深耕细分市场,以更低的门槛,让更多的机器人系统集成商使用司普禄机器人离线编程软件,从而加速更多高端机器人集成应用落地。
责任编辑:xj
原文标题:【KHGEARS钧兴谐波 | 工博会】司普禄推出“RobotX”机器人离线编程软件平台 向高端机器人集成迈进
文章出处:【微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
206文章
26960浏览量
201244 -
编程
+关注
关注
88文章
3438浏览量
92316
原文标题:【KHGEARS钧兴谐波 | 工博会】司普禄推出“RobotX”机器人离线编程软件平台 向高端机器人集成迈进
文章出处:【微信号:gaogongrobot,微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
LabVIEW的六轴工业机器人运动控制系统
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评

ai人工智能机器人
基于Matlab和VR技术的移动机器人建模及仿真
焊接机器人编程方法及流程技巧





 工商网监
工商网监
评论