 ABB机器人的SafeMove2在实际使用中具备哪些功能
ABB机器人的SafeMove2在实际使用中具备哪些功能
总是在各种介绍里看到ABB机器人的SafeMove2,那你是否了解它在实际使用中所需的硬件和功能呢?SafeMove2是ABB第二代安全控制器产品,Safe Move2拥有更好的柔性,节省空间,并提供先进的调试工具,从而提高生产效率并降低总投资成本。这些特性结合*的安全性,使机器人与工厂工人能够更紧密地协作。Safe Move2保留了*代Safe Move众多先进的安全功能,包括安全速度限制、安全静止监控、安全轴范围以及位置和方向监控。
Safe Move2简化了生产场景,并提供加快调试流程的工具,以便更快地完成设置和验证。Safe Move2也在ABB的IRC5机器人控制柜系列及IRC5单柜、紧凑柜和喷涂控制柜中集成安全总线连接功能,增强型协作解决方案Safe Move2提高了效率和柔性,促进了ABB物、服务与人互联的集成式生态系统的建设。ABB机器人凭借众多创新型解决方案与服务,正帮助用户走进未来工厂,同时不断重塑制造业自动化的新局面。
SafeMove2具有以下功能:
安全区域:监测机器人工具/上臂是否在特定区域,若违规根据设置机器人停车或输出相应信号。可优化工作区域/围栏尺寸,并简化安装的安全保护。它保护操作员、机器和设备。
安全轴范围:监测机器人各轴工作位置是否在特定区域,若违规根据设置机器人停车或输出相应信号。取代了电子限位开关,增加了控制和灵活性,并降低了维护要求。
机器人的安全速度:监控机器人的速度,这样操作员就可以在机器人附近工作。
机器人静止监测:机器人静止运动时,无需将机器人切换至电机关闭。它使操作人员能够在机器人附近执行任务。
循环制动检查:定期检查制动器,保证刹车的良好运行。
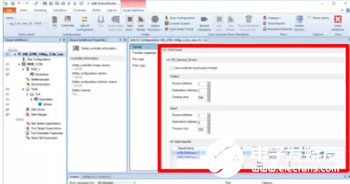
与SafeMove1代(图1)不同,SafeMove2(图2)区域功能的激活信号、机器人违规状态的输出信号不再使用硬接线,而全部采用现场安全总线,例如PROFISAFE。故使用SaveMove2的机器人必须至少有888-2 PROFINET Controller/Device或888-3 PROFINET Device选项,使得机器人能够与外界通过PROFINET通讯。
图1 SafeMove1 硬件
图2 SafeMove2板卡
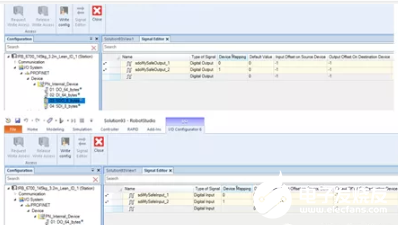
在Robotstudio2019.3之前,配置Safemove2与外界的安全信号,在Safemove专用配置界面的安全IO配置器下,如下图
在Robotstudio2019.4之后(包括Robotstudio2020),配置Safemove2与外界的安全信号,在I/O配置器下,如下图
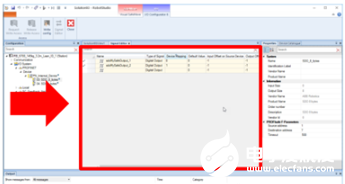
在下图左侧,选择安全模块(例如SDO_8_BYTE,SDI_8_BYTE,相关destination address点击属性设置),然后配置相关安全信号。
责任编辑:gt
-
控制器
+关注
关注
112文章
15200浏览量
171120 -
机器人
+关注
关注
206文章
27015浏览量
201362 -
电机
+关注
关注
139文章
8308浏览量
142052
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论