 特斯拉已更新软件,自动驾驶系统可超车后还能保持超车道行驶
特斯拉已更新软件,自动驾驶系统可超车后还能保持超车道行驶
在自动辅助驾驶方面,特斯拉的“Autopolit”凭借着不错的驾驶体验,受到不少车主的喜爱。
不过,即便如此,Autopolit还远没有达到可以自动驾驶的地步,依然需要不断推送更新功能,来迭代其自动辅助驾驶的智能程度。
日前,有外媒报道,特斯拉已开始推动新的软件更新,推出一个名为离开超车道的新功能,可以让Autopilot自动驾驶系统保持在超车道,而不用像通常那样返回正确的行车道。
听上去,让车辆长时间占用超车道,是一种不理智的做法。
不过对于特斯拉自动驾驶来说,在不违反道路交通规定的情况下,Autopolit在超车道上完成超车动作后。不用像此前那样,再次返回到正常的行车道行驶。
因为,对于超车道前后无车、且旁边行车道有车的情况下,保持在超车道行驶,显然是对特斯拉最好的行驶策略之一。
而此次,系统升级之后,特斯拉车主在高速上,不用在频繁在超车道和正常行车道之间转换,使用Autopolit行车的体验,也会大大提升。
此外,在高速公路上这种简单的路况,自动驾驶显然比人类更为专业有序,如果车辆均能使用自动驾驶,保持固定合理的跟车间距,在高速路况上行驶的话,道路的通畅度也会随之提升。
而特斯拉Autopilot自动驾驶系统,已经考虑到了这些规则,可以将驾驶辅助系统设定到合理的跟车距离。
此外,自2018年12月以来,特斯拉Autopilot自动驾驶系统的导航功能,一直建议超车后返回正确的行车道。
但随着,此次系统升级,超车后还能保持超车道行驶后,特斯拉的Autopolit功能,也变得更为人性化和智能。
责编AJX
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
软件
+关注
关注
67文章
4336浏览量
85567 -
特斯拉
+关注
关注
66文章
5965浏览量
125647 -
自动驾驶
+关注
关注
773文章
12992浏览量
163127
发布评论请先 登录
相关推荐
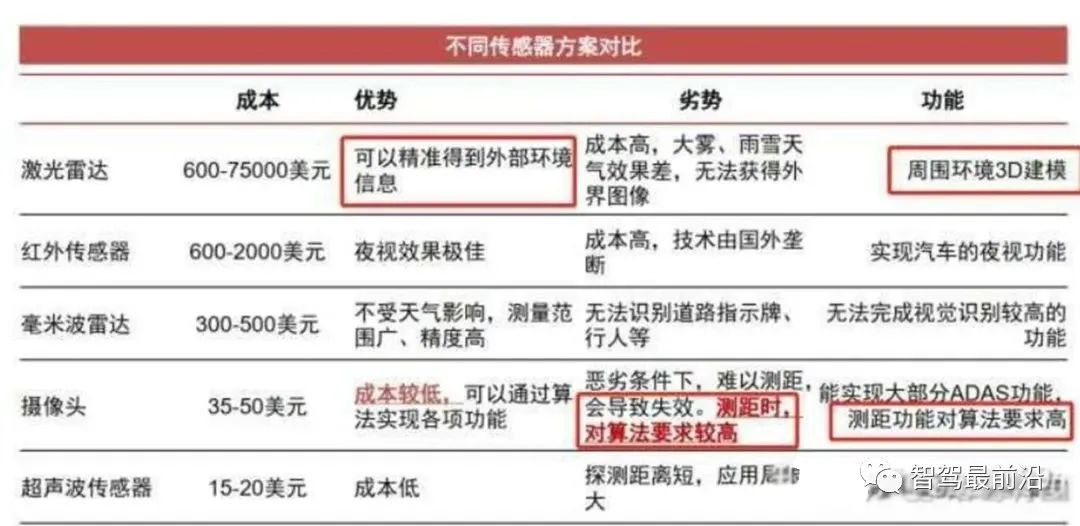
未来已来,多传感器融合感知是自动驾驶破局的关键
技术 ,摄像头和雷达等多传感器的探测数据 在前端(数据获取时)交互验证,让自动驾驶系统能感知到“看不见”的危险。 例如,在反向车道有强远光灯干扰的情况下,当雷达子系统探测到潜在运动目标
发表于 04-11 10:26
Mobileye与大众汽车深化合作,推动自动驾驶技术发展
新技术涵盖了多个应用场景,如高速公路及市区道路驾驶中的高级辅助系统,如自适应超车、自主排队停车等功能。同时,Mobileye也将向大众商用车提供更多的自动驾驶技术解决方案。
LabVIEW开发自动驾驶的双目测距系统
LabVIEW开发自动驾驶的双目测距系统
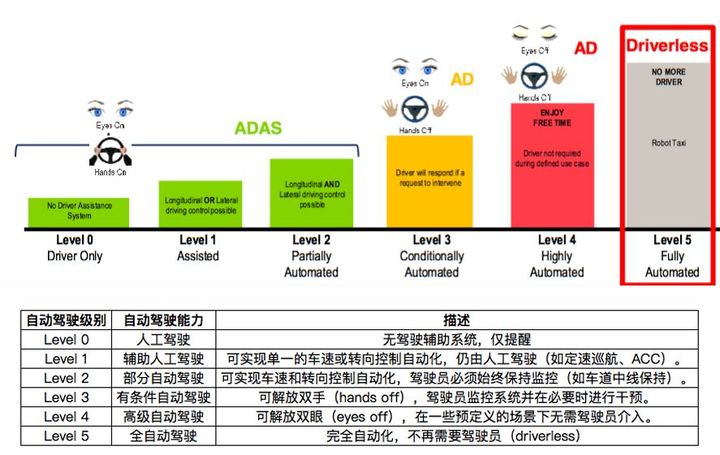
随着车辆驾驶技术的不断发展,自动驾驶技术正日益成为现实。从L2级别的辅助驾驶技术到L3级别的受条件
发表于 12-19 18:02
农机自动驾驶显示系统组成部分以及配置
不开农机自动驾驶系统这个概念的。
农机自动驾驶主要是通过软硬件同步协调一致达到自动驾驶的目的,硬件部分包括:电动方向盘、卫星信号接收器、角度传感器、高精度定位模块以及平板显示
发表于 10-17 17:52
【KV260视觉入门套件试用体验】八、VITis AI自动驾驶多任务执行MultiTask V3
是一种模型,旨在同时执行自动驾驶场景中的不同任务,同时实现优异的性能和效率。这些任务包括对象检测、分割、车道检测、可行驶区域分割和深度估算,这些都是自动驾驶感知模块的重要组成部分。
发表于 09-26 16:43
Tesla正在研究基于AI的自动驾驶规划控制
超车是一个涉及车辆侧向和纵向运动的复杂任务。超车操作包括换道到超车道、通过前车、换道回原车道等,并需要避免与其他车辆的碰撞。超车规划涉及车辆

介绍一种自动驾驶汽车中可行驶区域和车道分割的高效轻量级模型
本文介绍了TwinLiteNet:一种自动驾驶汽车中可行驶区域和车道分割的高效轻量级模型。语义分割是自动驾驶中理解周围环境的一项常见任务。
发表于 08-03 14:20
•831次阅读

图森未来成功完成中国首次自动驾驶重卡在公开道路的全无人化测试
物流园、东海大桥等自动驾驶公开测试道路,路线全程约62公里。图森未来自动驾驶卡车在面对港区和高速、快速道路等复杂路况时展现了强大的处理能力,包括交通信号灯识别、上下匝道、变道行驶、避让紧急车道
Matlab自动驾驶工具箱使用简介
一、自动驾驶工具箱 三个依次是 驾驶场景和传感器模块库 车辆控制模块库 3D仿真模块库 二、自动驾驶模块 自动驾驶模块位于模型预测控制工具箱中的自动
发表于 06-02 14:19
•0次下载

自动驾驶算法软件架构介绍
自动驾驶技术是一个庞大的工程体系,软件架构、功能算法、控制规划、感知识别、建图定位、电气架构、车载控制器、验证
体系等等,有太多的角度可以去切入。对于自动驾驶功能与算法开发,自动驾驶
发表于 06-01 14:41
•1次下载
自动驾驶感知系统常用方案
自动驾驶汽车首先应有一套完整的感知系统,代替驾驶人的感知,提供周围环境信息;其次应有一套集智能算法、高性能硬件于一体的控制系统,代替驾驶人的
聊聊自动驾驶感知系统
在自动驾驶赛道中,感知的目的是为了模仿人眼采集相关信息,为后续做决策提供必要的信息。根据所做决策的任务不同,感知可以包括很多子任务:如车道线检测、3D目标检测、障碍物检测、红绿灯检测等等;再根据感知预测出的结果,完成决策;最后根据决策结果执行相应的操作(如变道、
ADAS辅助驾驶——NOA自动辅助导航驾驶
功能的本质意思是把“导航”和“辅助驾驶”结合。在原来L2辅助驾驶的基础上(如车道线保持、自动跟车),加上车机的导航信息(如地图





 工商网监
工商网监
评论