 北京联通采用5G+MEC的专网方式实现隧道内巡检机器人等业务落地
北京联通采用5G+MEC的专网方式实现隧道内巡检机器人等业务落地
北京联通克服困难,在一个月内迅速组织项目团队并圆满完成国网电力北京公司(以下简称“北京电力”)海淀500KV超高压隧道5G专网建设,实现国网电力全国首个500kv地下有限空间隧道建设。
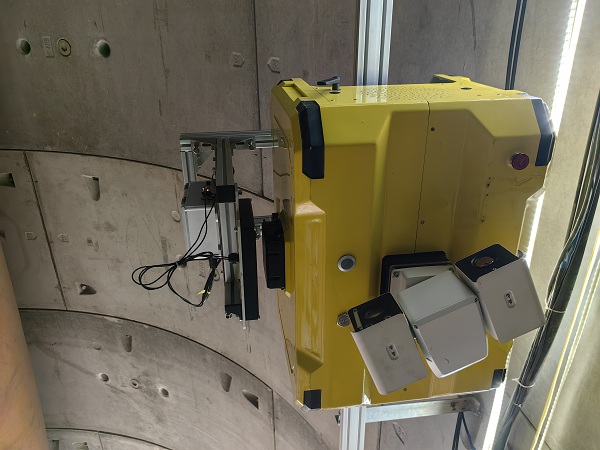
北京电力海淀500KV地下隧道承载首都供电功能,其安全稳定运行责任重大。隧道作业空间非常有限,具备高电压、高湿度等特点,施工难度较高,对其他电力隧道具备示范效应。
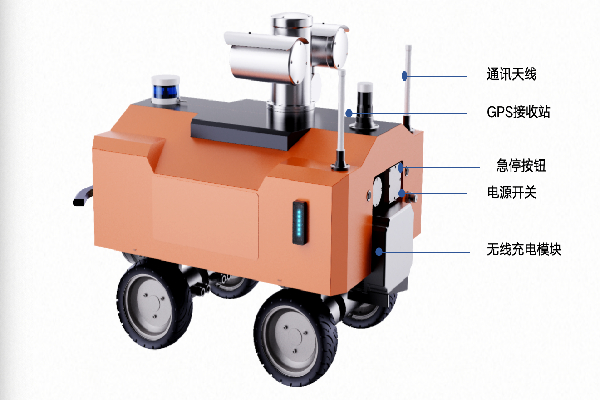
北京联通接到紧急任务后,高效支撑服务,多次组织场勘制定施工方案与业务解决方案,采用5G+MEC的专网方式实现隧道内巡检机器人、电缆接地传感器等业务落地,协调物料到货和施工安装,对接完成5G专网号卡开通和全程业务测试,最终在北京电力规定时限9月1日前完成了全程业务调通。
本项目借助5G的低时延、大带宽等网络特性,能够实现电能质量20ms的数据采集,使得电能质量分析仪能够更广泛、更迅速、更准确的提供电压暂降和中断数据返回、分析等功能。该业务采用前端部署,后端做集中处理方式,节省中间传输过程并对比传统部署方式将设备成本降低至原80%以下,真正实现工业互联网应用后设备制造降本的作用;同时满足首都政治供电保障需要,真正实现工业互联网应用后高质量服务效率提升的作用。
本项目获得了电力客户高度认可,成功完成在高湿度、超高压、有限空间环境下5G专网全覆盖,对未来在北京等重要城市开展工业互联网领域供给侧服务,扩展延伸至智慧城市地下管廊、水电气热等供给场景具有非常好的推广和借鉴价值。
责任编辑:tzh
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
26974浏览量
201301 -
电力
+关注
关注
7文章
2006浏览量
49423 -
5G
+关注
关注
1340文章
47793浏览量
553865
发布评论请先 登录
相关推荐
焦化厂智能巡检机器人
,但这种方式往往效率低下、成本高昂、安全风险大,同时还存在着漏检和误检等问题。为了应对这些挑战,引入巡检机器人来改善焦化炉巡检的情况。那么我们来说说焦化炉
巡检机器人有哪些功能和作用?
的可能性和变革。它们以其独特的优势,正在逐渐改变着我们的工作方式和生活,从工业生产到能源设施,从城市管理到公共安全,巡检机器人的身影无处不在。 一、巡检

天然气巡检机器人功能和作用?
。接下来,让我们深入了解一下燃气站巡检机器人的功能的作用吧! Ex-1型防爆轮式巡检机器人采用防爆设计,适用于Ⅱ类爆炸环境,可在-15~55

【爱芯派 Pro 开发板试用体验】基于爱芯派 Pro 开发板的警用安防智能机器人设计
互联网(4G、5G)、BLE通信、LoRA等多渠道传输。云平台主要作用是多机器人管理调度、应急控制、业务处理、视频分析、数据报表、安全态势分
发表于 01-14 21:56
LabVIEW的六轴工业机器人运动控制系统
空间的轨迹构造方法,包括直线、圆弧、NURBS自由曲线等轨迹的构造方程。
模型机器人测试与仿真:通过LabVIEW编程,项目在PC端实现了算法和运动仿真。六轴模型机器人被用作实体测试对
发表于 12-21 20:03
用全志R128复刻自平衡赛车机器人,还实现了三种不同的操控方式
更上一层楼。
硬件设计
本项目中的自平衡赛车机器人的硬件设计结构非常简单,硬件部分主要由R128开发板和几个驱动模块组成。
供电模块
自平衡机器人采用锂电池供电的方式,并利用mi
发表于 12-20 10:22
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
、雷达传感器等设备的数据,夸父人形机器人能够更加灵活和高效地完成各种任务。同时,通过KaihongOS的链接,夸父人形机器人构建全场景生态,实现在科研教育、特种行业、工业应用、家庭场景
发表于 12-20 09:31
5G边缘网关如何助力打造隧道巡检机器人
针对隧道渗漏水、冻害、事故监测预警等关键需求,可以借助5G边缘网关打造隧道巡检机器人应用,融合5G技术、人工智能技术、边缘计算技术等,实现智

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递
发表于 11-30 16:01
搭载KaihongOS的工业平板、机器人、无人机等产品通过3.2版本兼容性测评,持续繁荣OpenHarmony生态
方案、高防护超耐用结构设计、高效安全人机互动等优势,可服务于制造控制、设备巡检、质量监控、消防管控等多个行业场景。
搭载KaihongOS的工业平板
搭载KaihongOS的机器人由
发表于 08-17 18:02
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
,移动机器人导航技术大致可分为以下几种:
01激光导航
激光导航分为激光反光板导航与激光自然导航两种方式:
1、激光自然导航
激光自然导航是一种无需使用反射板的自然导航方式,它不再需要通过辅助导航标志(二维码
发表于 06-28 09:52
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
发展。在前两篇文章中,我们介绍了移动机器人的基本概念和硬件组成。本文继续深入探讨移动机器人的自主导航系统及上位机软件****设计与实现。
01移动机器人的
发表于 06-28 09:36
巡检机器人替代传统人工巡检,智能巡检机器人5G工业路由器应用
行业应用也得到了广泛的应用,智能巡检机器人也被列为了核心的发展计划之中。人工巡检、直升机巡检和机器人巡检

隧道巡检新时代:巡检机器人优势及多项功能解析
近年来,随着城市地铁、高速公路等交通建设的不断发展,越来越多的隧道被建造出来。而对于这些隧道的安全问题,巡检是必不可少的一环。然而,由于隧道内环境复杂、危险系数高等原因,传统的人力
浅谈儿童陪护机器人
机器人的长期稳定运行。对于控制算法的实现,可以采用PID控制器或者模糊控制器,以达到更加精准的控制效果。
最常见的是TB67S249FTG芯片,它是一种适用于双极性步进电机的驱动芯片,采用
发表于 05-11 15:12





 工商网监
工商网监
评论