 研究人员发明微型昆虫机器人,离全自主微型机器人更近一步
研究人员发明微型昆虫机器人,离全自主微型机器人更近一步
随着科技的不断发展,以及人工智能技术的进步,微型机器人日趋普遍,它们可以在极为狭小的空间里运动,这是人类和传统机器人无法做到的。但由于其体型过小,以至于功率、控制力受限。事实上,目前,绝大多数微型机器人由电动执行器驱动,而由于电池的小规模(低于1.8兆焦耳每公斤)令机器人尚不能够自主地工作。
也就是说,想要开发真正自主的微型机器人,还需要在微制造、驱动和控制的有所创新,比如引入新的动力来源、机制、结构微元件和驱动材料。
近日,《科学机器人》上的一篇文章,报告了来自南加州大学的研究人员发明的一款酒精驱动的微型昆虫机器人RoBeetle。这对于解决微型机器人能量来源问题上意义重大,也令科学界朝着研发完全自主微型机器人的目标迈进了重要的一步。
不同于其他依靠电池或外接电线驱动的微型机器人,该微型机器人的能量来源是甲醇。它长15毫米,质量只有88毫克(大约相当于三粒大米),却可以拖运其自身重量2.6倍的物体。它能够携带95毫克的燃料,燃料最多可以为其供电2个小时。
值得一题的是,甲醇在正常大气压下以液体形式储存,能量是小型电池的10倍以上。这意味着利用甲醇驱动的微型机器人自主性更强,同时可以保持较小的体积。
为了验证在甲醇驱动下机器人的运动性能,研究人员进行了两组实验,分别测试了测试了斜面倾斜角度爬坡能力和RoBeetle在粗糙程度不同表面上的爬行能力。
结果显示,第一组实验该机器人能轻松爬上倾斜角为5°和10°的斜坡,但在倾斜角度升至15°时失败了。第二组时机器人可以在纸巾、泡沫表面爬行,但无法在光滑的玻璃表面爬行,并且它可以拖运其自身重量2.6倍的物体。
研究人员表示,RoBeetle的动力设计可作为范例,用于研发能够在水陆空运动的自主微型机器人。下一步计划是研究在RoBeetle工作时如何为其添加燃料,从而使机器人可以长时间持续工作。此外,研究人员计划对RoBeetle进行编程,使操作者能与它进行交互,让机器人可以充当人工授粉器,或者协助医生进行复杂的手术。
虽然RoBeetle是一个令人兴奋的微机器人里程碑,但仍有改进空间。RoBeetle 的运动速度比其它微机器人小得多。同时,该机器人只能向前运动,人们无法控制其转向和速度。此外,由于研究人员放弃了传统的电子控制器,因此机器人的功能升级更为困难,并且限制了外部控制与交互。
当然,对于微型机器人的探索仍在继续,也许在未来,它们能有效地解决能源问题。如同电影《超能陆战队》中的微型机器人一般,能变化出各种形态,未来将发挥无限可能。
-
机器人
+关注
关注
206文章
27004浏览量
201353 -
酒精
+关注
关注
0文章
10浏览量
8261 -
电池
+关注
关注
82文章
9792浏览量
123461
发布评论请先 登录
相关推荐
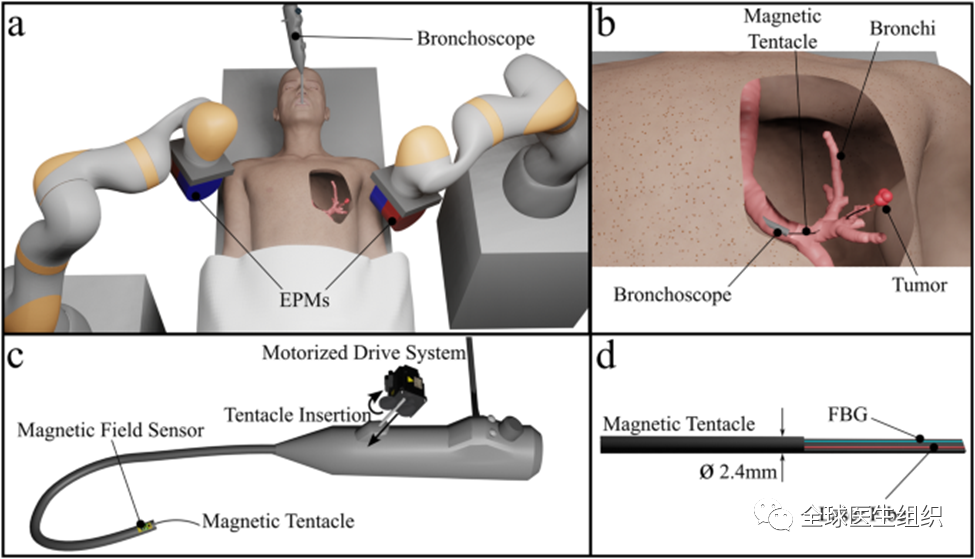
面向狭窄腔道医疗作业的微型机器人
LabVIEW的六轴工业机器人运动控制系统
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
ai人工智能机器人
基于Matlab和VR技术的移动机器人建模及仿真
基于磁场驱动的无线微型软体机器人应用

开发一种用于无创和无线监测系统的自感知AI微型机器人
2毫米微型磁控机器人有望改变癌症检测和精准治疗
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
如何快速地让机器人投入生产
基于宽度神经网络的微型仿鱼机器人运动控制方法






 工商网监
工商网监
评论