 机器人画家可以通过观察人类画家的笔触来学习吗?
机器人画家可以通过观察人类画家的笔触来学习吗?
机器人画家可以通过观察人类画家的笔触来学习吗? 这是卡耐基梅隆大学的研究人员最近在预印本Arxiv.org上发布的一项研究中提出的问题。他们表示,有71%的人发现该论文提出的方法成功地捕捉了原始的艺术家风格的特征,包括手部动作,而且同一组中只有40%的人可以分辨出机器人所绘制的笔触。 使用人工智能来生成艺术作品的研究方向已被详尽地探索。一年一度的国际比赛(RobotArt)——要求参赛者设计具有艺术倾向的人工智能系统。马里兰大学和Adobe Research的研究人员描述了一种称为LPaintB的算法,该算法可以再现Leonardo da Vinci,Vincent van Gogh和Johannes Vermeer风格的手绘画布。 Nvidia的GauGAN使艺术家能够布置原始草图,并通过生成的对抗性人工智能系统立即将其转换为逼真的风景。Cynthia Hua等艺术家已经利用Google的DeepDream生成超现实主义艺术品。 但是,卡耐基梅隆大学的研究人员试图通过关注于笔触作为艺术风格的“内在要素”的技术来开发“风格学习者”模型。 他们表示:“我们的主要贡献是开发了一种模仿艺术家风格的笔触生成的方法。”“这些笔触可以与基于笔触的渲染器结合使用,以风格化机器人绘画过程。”
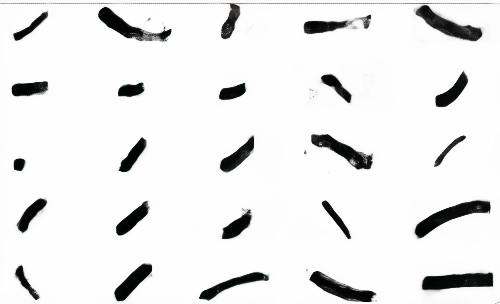
通过人工智能生成模型创造的笔触
该团队的系统包括一个机械臂,一个将图像转换为笔画的渲染器以及一个生成模型,该模型根据艺术家的输入来合成笔触。手臂握住一支刷子,将其浸入装有涂料的桶中,然后将其放到画布上,以清除笔画之间的多余涂料。 渲染器使用强化学习来学习基于画布和给定的图像生成一组笔划的过程,而生成模型则识别出画家的笔触模式并相应地建立新的笔触。 为了训练渲染器和生成模型,研究人员设计并3D打印了配有反射标记的画笔固定装置,可以通过运动捕捉系统对其进行跟踪。 一位艺术家用它在纸上创建了730种不同长度,厚度和形式的笔画,这些笔画以网格进行索引并与运动捕捉数据配对。 在一项实验中,研究人员让他们的机器人为虚构的记者Misun Lean绘制图像。然后,他们要求112名不知道图像作者身份的受访者(其中54位来自Amazon Mechanical Turk,另外58位是来自三个大学的学生)来决定是机器人还是人类在为其作画。根据结果,超过一半的参与者无法将机器人绘画与人类的抽象绘画区分开。
机器人手臂为MisunLean作画 该团队计划在下一个研究阶段通过开发可直接生成艺术家风格笔触的样式器模型来改进现有的生成模型。他们还计划设计一个管道机制来使用机器人绘制风格化的笔触,并使用这些数据作为新的样本丰富训练集。 本研究共同作者表示:“我们旨在调查一个潜在的'艺术家'输入消失现象。” “如果我们不断向系统提供生成的动作而不将其与原始的人类生成的动作混合,则有可能人类的风格会作为一种新的生成样式而消失。在一系列迭代训练中,人类行为主体的影响逐渐消失,机器的负担能力可能会发挥更大的作用。在这种情况下,我们对研究人类在此过程中所保留的作者身份很感兴趣。”
-
机器人
+关注
关注
206文章
27025浏览量
201377 -
人工智能
+关注
关注
1776文章
43824浏览量
230580 -
渲染器
+关注
关注
0文章
17浏览量
3204
原文标题:机器人画家升级!通过观察人类行为学习技巧,可模拟艺术家笔触
文章出处:【微信号:tyutcsplab,微信公众号:智能感知与物联网技术研究所】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
LabVIEW的六轴工业机器人运动控制系统
用全志R128复刻自平衡赛车机器人,还实现了三种不同的操控方式
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
ai人工智能机器人
基于Matlab和VR技术的移动机器人建模及仿真
机器人设计:解决人类问题的新思路






 工商网监
工商网监
评论