 KUKA-8.3系统力矩监控学习技术报使用方法分析
KUKA-8.3系统力矩监控学习技术报使用方法分析
G_Koll_Interface()
CMD_SEL,PAR1,PAR2,PAR3,PAR4,PAR5,PAR6,PAR7,PAR8,PAR9
P1 1学习位置/2 力矩监控
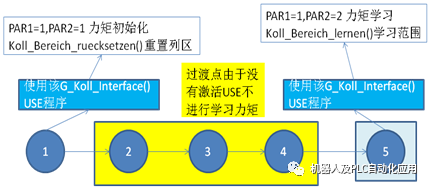
1. 学习前要先新进行初始化 .
2. 机器人在进行学习力矩时,只针对调用USE轨迹点的力矩测量值,这些值只对改轨迹点有效,其他轨迹点不能使用 .
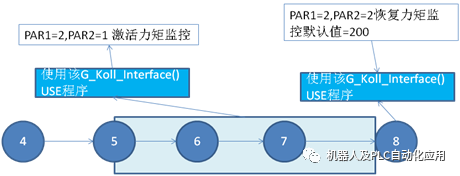
开启力监控后,力矩监控值对之后的轨迹点都有效果, 力矩监控变量$TORQMON会始终影响后面的轨迹点,直到将力矩监控值恢复默认值200.
ASE #USR_ADV
Advance
Modus=PAR2 模式 1初始/2激活
Bereich=PAR3 存储区
CASE #USR_TRIG
Trig
;
Modus=PAR2
Bereich=PAR3
;
SWITCH PAR1
CASE 1
;学习驱动器碰撞扭矩降低
IF($MODE_OP==#EX) AND ($OV_PRO==100)THEN
IF(PAR2==2)THEN;终点
Koll_Bereich_lernen()学习范围
在进行学习力矩时,要注意学习的力矩范围,力矩的测量值只针对使用USE的当前轨迹,因此想使用的机器人轨迹力矩要与当前测量点吻合。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27015浏览量
201360 -
力矩
+关注
关注
0文章
28浏览量
9651
原文标题:KUKA-8.3系统力矩监控学习技术报使用方法分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
浅谈煤矿井下电力监控系统的应用
,才能实现信息在设备之间的传输和信息的运算分析,此外,还需要打印机保证信息的转换和收集。而井下站点需要通讯服务器、供电设备和光端设备,几种设备组成信息的收集和传输网络,并由供电设备提供地下监控系统需要
发表于 02-01 12:54
KUKA smartPAD 2示教器的使用方法
通过 smartPAD 2 可以对 KR C5 进行全面操作和编程。smartPAD 2 是一台独立的“计算机”,采用基于 Linux 的操作系统。通过 EtherCAT 传输安全操作元件(例如紧急停止和使能开关),并与控制器的系统板建立“远程连接”。

更改KUKA C 4 Windows系统的密码
或者可以通过 WorkVisual 更改密码。如果在机器人控制系统上安装了 KUKA.NonAdmin,则只能通过 WorkVisual 更改该密码。
LabVIEW远程监控
LabVIEW远程监控
远程监控的应用场景
从办公室远程监控工厂车间的测试设备。
在世界另一端的偏远地区监控客户现场的发电设备。
从公司远程监控
发表于 12-03 21:51
频谱分析仪的使用方法
频谱分析仪的使用方法 频谱分析仪是一种用于测量电子信号频谱的仪器,广泛应用于通信、无线电、音频等领域。它可以分析信号的频率、幅度、相位等参数,帮助工程师进行信号
CoreSight技术系统设计指南
。
这是内核全速运行时的非侵入性调试,使用:
-关于指令执行和数据传输的信息集合--实时在芯片外交付--用于将数据与开发工作站上的源代码合并以供将来分析的工具。
CoreSight技术满足了对多核调试和跟踪解决方案的需求,该解决方案可为核心以外的整个
发表于 08-12 06:00
ARM Neoverse N1 Core性能分析方法
,开发人员使用性能分析和工作负载表征技术来研究应用程序的性能特征。
服务器类系统支持广泛的性能监控技术,以衡量工作负载效率、评估其资源需求并
发表于 08-09 06:01
解析混合放大器的使用方法
混合放大器(MixerAmplifier)是一种用于将两个或多个输入信号进行混合和放大的电路设备。它常用于无线通信系统、音频处理和频谱分析等应用。以下是混合放大器的一般使用方法。

KUKA机器人系统变量$PRO_NAME所选程序的名称(参考解释器)
如果机器人控制器在Multi-Submit模式下操作(仅适用于KUKA系统软件8.3及更高版本),则变量无效。多提交模式下机器人控制器的系统状态分组在变量$PROG_INFO[]中。






 工商网监
工商网监
评论