 KUKAC4机器人电机风扇故障,使得机器人没有好使能.
KUKAC4机器人电机风扇故障,使得机器人没有好使能.
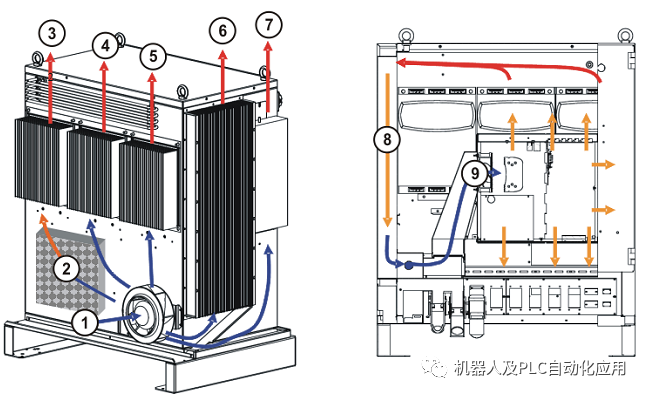
箱柜冷却系统说明:
箱柜冷却装置包含两条冷却循环回路。装有控制、功率电子元器件的箱内范围通过一个换热器进行散热。在箱柜的外部区域,KPP 和 KPS 的低压电源件、镇流电阻和散热体则直接通过外部空气适当冷却。
外部风扇更换步骤
1. 从控制柜拔出风扇插头(2) X14。
2. 拧松四条螺丝(1) 并将背板拆出。
3. 将进线套筒的固定螺丝(1)拆出。
4. 将进线套筒(2)折回,然后拉出连接线。
5. 将风扇支架(1) 连同风扇一起取下。
6. 将新风扇连同支架一起装上并固定。
7. 将连接线引入箱柜内。
8. 装上进线套筒。
9. 装上背板,并将其固定
10. 将风扇插头X14 插到控制柜上。
20.F14 外部风扇7.5 A
KUKA 机器人报:"外部风扇转速低故障"
对电箱外部风扇进行清理,进行关机冷启动.故障消除
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电子元器件
+关注
关注
132文章
3082浏览量
103207 -
机器人
+关注
关注
206文章
26974浏览量
201308 -
连接线
+关注
关注
1文章
196浏览量
16916
原文标题:KUKAC4机器人电机风扇故障,使得机器人没有好使能.
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【开源项目】Emo:基于树莓派 4B DIY 能笑会动的桌面机器人
Emo是一款基于树莓派4做的个人伴侣机器人,集时尚与创新于一身。它不仅仅是一款机器人,更是一个活生生的存在,与其他机器人不同,它拥有独特的个性和情感。
硬件部分
树莓派
发表于 12-26 15:18
LabVIEW的六轴工业机器人运动控制系统
。LabVIEW的可视化编程环境和强大的数据处理能力,使得复杂的运动学算法和轨迹规划得以顺利实现,显著提高了工业机器人的控制精度和效率。
这是LabVIEW的一个功能介绍,更多的使用方法与开发案例,欢迎登录官网,了解更多信息。有需要LabVIEW项目合作开发,请与我们
发表于 12-21 20:03
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递
发表于 11-30 16:01
ai人工智能机器人
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。
如今的智能电话机器人,每天的电话拨打量可达800-1000通,相比人工提高了3-5倍,大大缩短了名单的筛选
发表于 09-21 11:09
基于Matlab和VR技术的移动机器人建模及仿真
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
发表于 09-20 06:24
profinet转ethernet网关连接发那科机器人配置案例
本案例是西门子1200PLC通过PROFINET转EtherNet网关连接发那科搬运机器人配置案例。所需设备:西门子1200PLC、Profinet转EtherNet IP网关、Fanuc机器人
发表于 08-03 17:58
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
..
05GNSS导航
通过GNSS导航模块接收GPS卫星信号进行导航定位。一般采用伪距差分动态定位法,用基准接收机和动态接收机共同观测4颗GPS卫星,按照一定的算法即可求出某时某刻机器人的三维位置坐标。差分动态
发表于 06-28 09:52
自编程机器人,售后难做吗?
自编程是如何完成的。
自编程其实也不是很高深的问题。
当用户给出参数时,有时也包括逻辑。
例如用户说,如果设备打开完毕,执行一个命令。
这个例子就包括了一个如果。你的智能机器人只需要生成一个
发表于 06-08 16:20
如何快速地让机器人投入生产
步进电机,我们可以提供的是几个半转或1/4,1/8转。
而机器人电脑,自动处理这些数据,我们要处理的是手指的空间位置,也就是xyz坐标。
然后处理夹具的开关。
所以,我们日常程序必须备份。这些程序可以
发表于 06-06 16:18
机器人如何计算简单的运动
模型要具备齿轮,导轨几种基本的运动原理。
要分辨基本图形,视觉模型要能分辨圆形,方形和三角形。
有了这两点,机器人就基本上能计算开模和注塑这种简单的工作了。要替代人类的工作,还要进一步学习。
发表于 05-19 20:40
浅谈儿童陪护机器人
儿童陪护机器人中得到了广泛应用。
在儿童陪护机器人中,步进电机芯片主要用于转动控制。在此过程中,控制器通过对步进电机芯片输出的脉冲信号进行控制,使得
发表于 05-11 15:12





 工商网监
工商网监
评论