 KUKAC4机器人零点校正
KUKAC4机器人零点校正
完整的零点标定过程包括为每一个轴标定零点。KUKAC4机器人通过技术辅助工具 EMD,可为任何一根在 机械零点位置的轴指定一个基准值 (例如:0°)。因为这样就可以使轴的机械位置和电气位置保持一致,所以每一根轴都有一个唯一的角度值。
所有机器人的零点标定位置都是相似的,但不尽相同。精确位置在同一机器人型号的不同机器人之间也会有所不同。
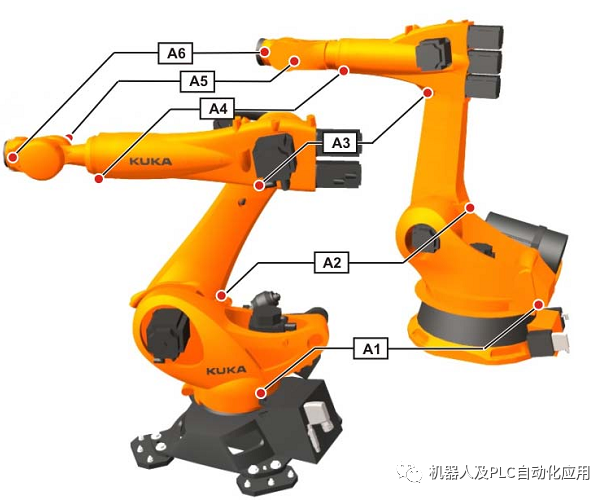
机械零点位置的角度值:
| A1 | -20° |
| A2 | -120° |
| A3 | +110° |
| A4 | 0° |
| A5 | 0° |
| A6 | 0° |

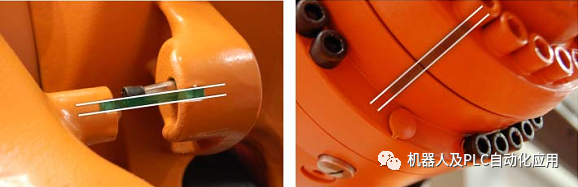
零点标定可通过确定轴的机械零点的方式进行。在此过程中轴将一直运动,直至达到机械零点为止。这种情况出现在探针到达测量槽最深点时。因此,每根轴都配有一个零点标定套筒和一个零点标定标记。
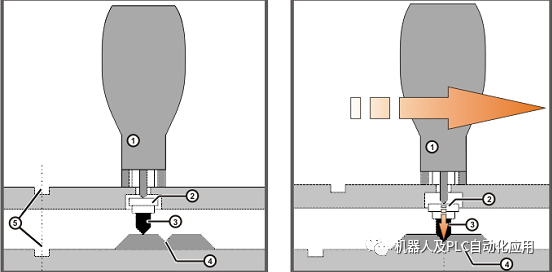
1. EMD (电子控制仪)
2.测量筒
3.探针
4 .测量槽
5.预零点标定标记
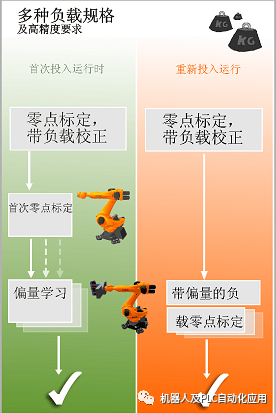
为何要学习偏量?
由于固定在法兰处的工具重量,机器人承受着静态载荷。由于部件和齿轮箱上材料固有的弹性,未承载的机器人与承载的机器人相比,其位置会有所区别。这些相当于几个增量的区别将影响到机器人的精确度。
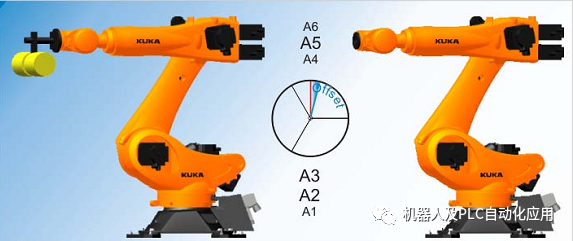
“ 偏量学习 ” 即带负载进行。与首次零点标定 (无负载)的差值被储存。如果机器人以各种不同负载工作,则必须对每个负载都进行 “ 偏量学习 ”。对于抓取沉重部件的抓爪来说,则必须对抓爪分别在不带构件和带构件时进行“ 偏量学习 ”。
Mastery.logMastery.log 零点标定偏量值文件位于硬盘的目录 C:KRCROBOTERLOG 下并含有零点标定的特定数据:
1. 时间戳记 (日期,时间)
2.轴
3. 机器人的系列号
4. 工具编号
5. 用度表示的偏量值 (Encoder Difference )
6. Mastery.log 举例:
Date: 22.03.11 Time: 1010
Axis 1 Serialno.: 863334 Tool Teaching for Tool No 5
(Encoder Difference: -0.001209)
Date: 22.03.11 Time: 1044
......
只有经带负载校正而标定零点的机器人具有所要求的高精确度。因此必须针对每种负荷情况进行偏量学习!前提条件是:工具的几何测量已完成,因此已分配了一个工具编号。

首次零点标定:
投入运行 > 零点标定 > EMD > 首次零点标定。
机器人移到预零点标定位置.
从窗口中选定的轴上取下测量筒的防护盖。(翻转过来的 EMD 可用作螺丝刀。)将 EMD 拧到测量筒上。

测量导线连到 EMD 上,并连接到机器人接线盒的接口 X32 上。

点击 零点标定。
按确认开关和启动键 (启动正向运行)。
当 EMD 识别到测量切口的最低点时,则已到达零点标定位置。机器人自动停止运行。数值被储存。该轴在窗口中消失。证明该轴已经校正完成了。
-
机器人
+关注
关注
206文章
26974浏览量
201300 -
机械
+关注
关注
8文章
1172浏览量
39598 -
EMD
+关注
关注
1文章
43浏览量
19911
原文标题:KUKAC4机器人零点校正
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
adxl362是否存在零点漂移的问题?
【开源项目】Emo:基于树莓派 4B DIY 能笑会动的桌面机器人
机器人的标定是什么 机器人标定方法有几种

AD8253在使用100倍放大微伏信号时怎么处理零点漂移造成的对检测信号的影响?
KUKAC4机器人零点校正

ai人工智能机器人
KUKA-C2机器人-校零
关于dcdc的零点和极点的理解是什么
利用外部中断来检测AC220v的零点,过零检测的作用是什么?
如何快速地让机器人投入生产
KUKAC4机器人首次开机启动






 工商网监
工商网监
评论