 实操:KUKA机器人创建工具坐标数据
实操:KUKA机器人创建工具坐标数据
使用机器人示教器设定工具
机器人控制系统通过测量工具(工具坐标系)识别工具顶尖(TCP-Tool CenterPoint,工具中心点)相对于法兰中心点的位置,TCP的测量有两种途径:一种是找个固定的参考点进行示教,另一种则是已知工具的各参数,就可以得到相对于法兰中心点的X、Y、Z的偏移量,相对于法兰坐标系转角(角度A、B、C),同样也能得出精确的TCP。
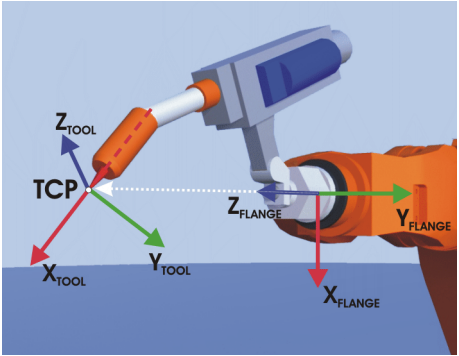
图8-8
通过一个固定参考点的工具坐标系的测量分为2步:首先确定工具坐标系的TCP点,然后确定工具坐标系的姿态如表8-7所示。
表8-7 TCP的测量的步骤
| 步骤 | 说明 |
| 1 |
确定工具坐标系的TCP点 可选择以下方法: *XYZ 4 点法 *XYZ 参照法 |
| 2 |
确定工具坐标系的姿态 可选择以下方法: *ABC 2 点法 *ABC 世界坐标法 |
1. TCP点的测量
1)XYZ4点法
XYZ4点法的原理:将待测工具的TCP从4个不同方向移向任意选择的一个参考点,机器人系统将从不同的法兰位置值计算出TCP,如图8-9所示。
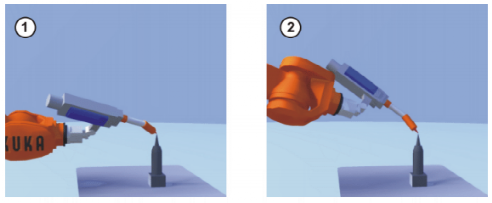
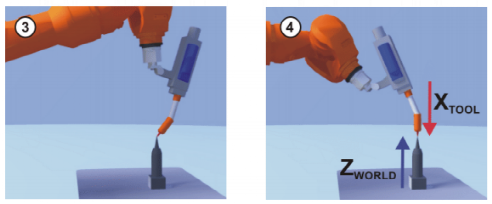
图8-9 XYZ4点法
其具体操作步骤如下:
1. 选择菜单序列 投入运行 > 测量 > 工具 > XYZ 4 点。
2. 为待测量的工具给定一个号码和一个名称。用继续键确认。
3. 用TCP移至任意一个参照点。按下“测量”,对话框“ 是否应用当前位置?继续测量” 用“是”加以确认
4. 用TCP从其他方向朝参照点。重复步骤3次。
5. 负载数据输入窗口自动打开,正确输入负载数据,然后按下“继续”按钮。
6. 包含测得的 TCP X、Y、Z 值的窗口自动打开,测量精度可在误差项中读取。数据可通过保存直接保存。
2)XYZ参照法
采用 XYZ 参照法时,将对一件新工具与一件已测量过的工具进行比较测量。机器人控制系统比较法兰位置,并对新工具的TCP进行计算。如图7-10所示。
图8-10
其具体操作步骤如下:
1. 前提条件是,在连接法兰上装有一个已测量过的工具,并且TCP的数据已知。
2. 在主菜单中选择投入运行 > 测量 > 工具 > XYZ 参照。
3. 为新工具指定一个编号和一个名称。用“继续”键确认。
4. 输入已测量工具的TCP数据。用“继续”键确认。
5. 用 TCP 移至任意一个参照点。点击测量。用“继续”键确认。
6. 将工具撤回,然后拆下。装上新工具。
7. 将新工具的TCP移至参照点。点击测量。用“继续”键确认。
8. 按下保存键。数据被保存,窗口自动关闭。
2. 确定工具坐标系的姿态/朝向
确定工具坐标系的姿态/朝向的方法主要有ABC 世界坐标法和ABC 2点法两种。
1)ABC世界坐标法
ABC世界坐标法是将工具坐标系的轴调整为与世界坐标系的轴平行。机器人控制器从而得知TOOL坐标系的取向,如图8-11所示。
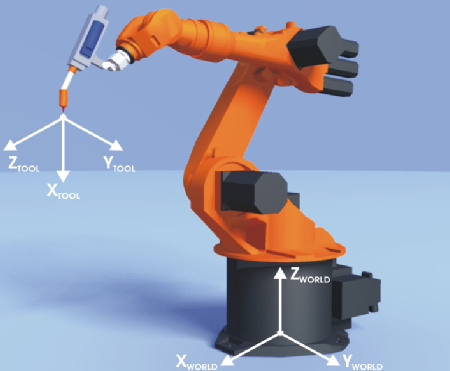
图8-11 ABC世界坐标法
此方法有两种方式:
n5D: 用户将工具的作业方向告知机器人控制系统。作业方向默认为X轴。其他轴的取向将由系统确定,用户对此没有影响力。系统总是为其它轴确定相同的取向。如果之后必须对工具重新进行测量,比如在发生作业后,仅需要重新确定作业方向。而无需考虑作业方向的转度。应用范围:例如:MIG/MAG 焊接,激光切割或水射流切割。
n6D:用户将所有三个轴的取向告知机器人控制系统。应用范围:例如:焊钳、抓爪或粘胶喷嘴。
其具体操作步骤如下:
如果不是通过主菜单调出操作步骤,而是在TCP测量后通过 ABC 2点按键调出,则省略下列的两个步骤。
1. 在主菜单中选择投入运行 > 测量 > 工具 > ABC 世界。
2. 输入工具编号。用“继续”键确认。
3. 在 5D/6D 栏中选择一种规格。用“继续”键确认。
4. 如果选择 5D:
将 +XTOOL调整至平行于-ZWORLD的方向。(+XTOOL=作业方向)
如果选择 6D:
按下列方法进行工具坐标系统的轴的调整。
使 +XTOOL与-ZWORLD 平行。(+XTOOL=作业方向)
n+YTOOL 与 +YWORLD 平行
n+ZTOOL 与 +XWORLD 平行
5. 按下“测量”键来确认。对信息提示“要采用当前位置吗?测量将继续”按下“是”键来确认。
6. 随即打开另一个窗口。在此输入负荷数据。
7. 然后按“继续”和“保存”结束此过程。
8. 关闭菜单。
2)ABC 2点法
ABC 2点法是指通过趋近X轴上一个点和XY平面上一个点的方法,机器人控制系统即可得知工具坐标系的各轴。当轴方向必须特别精确地确定时,将使用此方法,如图7-12所示。

图7-13 ABC 2点法
其具体操作步骤如下:
如果不是通过主菜单调出操作步骤,而是在TCP测量后通过ABC 2点按键调出,则省略下列的两个步骤。
1. 前提条件是,TCP已通过XYZ法测定。
2. 在主菜单中选择投入运行 > 测量 > 工具 > ABC 2 点。
3. 输入已安装工具的编号。用“继续”键确认。
4. 用TCP移至任意一个参照点。点击测量。用“继续”键确认。
5. 移动工具,使参照点在X轴上与一个为负X值的点重合(即与作业方向相反)。点击测量。用“继续”键确认。
6. 移动工具,使参照点在 XY 平面上与一个在正Y向上的点重合。点击测量。用“继续”键确认。
7. 按“保存”。数据被保存,窗口关闭。或按下负载数据。数据被保存,一个窗口将自动打开,可以在此窗口中输入负载数据。
3. 数字输入
当已知工具的各参数,就可以直接输入相对于法兰中心点的X、Y、Z的偏移量,相对于法兰坐标系转角(角度A、B、C)。
其具体操作步骤如下:
1. 在主菜单中选择投入运行 > 测量 > 工具 > 数字输入。
2. 为待测量的工具给定一个号码和一个名称。用“继续”键确认。
3. 输入工具数据。用“继续”键确认。
4. 输入负载数据。
5. 按“继续”确认,按下“保存”键,数据被保存。
-
控制系统
+关注
关注
41文章
5960浏览量
108684 -
机器人
+关注
关注
206文章
27020浏览量
201362
原文标题:实操:KUKA机器人创建工具坐标数据
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
LabVIEW的六轴工业机器人运动控制系统
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!



没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?

如何快速地让机器人投入生产
VASS版本的-KUKA机器人的数据提供

KUKA机器人密码介绍

机器人坐标系用法和算法原理






 工商网监
工商网监
评论