 工业机器人整体设计过程
工业机器人整体设计过程
机器人技术是一种以自动化技术和计算机技术为主体、有机融合各种现代信息技术的系统集成和应用。
全书以工程应用为主,不仅可以帮助建立工业机器人整体设计的认知和思路,重点通过典型案例解读帮助读者切实掌握不同用途机器人的设计、实现方法。
图书内容
本书将在介绍工业机器人基本分类、工作原理与用途的基础上,给出了机器人设计的整体思路和设计方法;同时,通过列举实例,重点介绍了工业机器人机械系统设计、驱动系统设计、控制系统设计、感觉系统设计、编程设计、示教与再现等方面的要求与实现方法,最后通过喷涂机器人、焊接机器人、装配机器人等几个典型实例详细说明不同功能机器人的整体结构特点与设计、实现方法。 本书实用性与可参考性强,可为从事工业机器人设计、操作与维护相关工作的工程技术人员提供帮助,也可供大学院校机电专业、机器人专业的师生学习参考。
图书特色
工业机器人设计过程全知道,整体设计全覆盖
工业机器人各系统设计细节和关键点讲解到位
机器人设计实例举一反三,直接应用
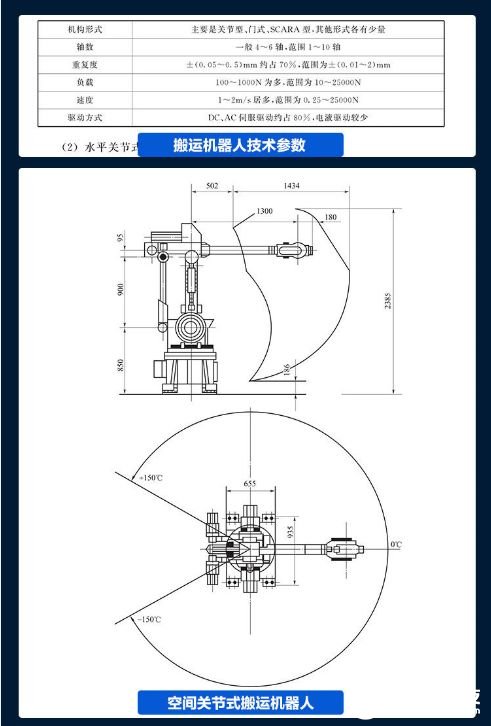
搬运机器人全程设计
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27025浏览量
201377 -
设计
+关注
关注
4文章
814浏览量
69701 -
工程
+关注
关注
0文章
165浏览量
27566
发布评论请先 登录
相关推荐

LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核
发表于 12-21 20:03
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。图1
随着工业智能化的快速发展,智能机器人设备已成为工业自动化体系的佼佼者,而智能机器人设备核心—RO
发表于 11-30 16:01
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统
EPR6-S工业机器人专用六轴伺服驱动器通过EtherCAT转profinet网关与西门子PLC1200连接
本案例EtherCAT转profinet(Profinet转EtherCAT)网关
发表于 10-24 14:04
ai人工智能机器人
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。
如今的智能电话机器人,每天的电话拨打量可达800-1000通,相比人工提高了3-5倍,大大缩短了名单的筛选过程
发表于 09-21 11:09
基于Matlab和VR技术的移动机器人建模及仿真
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
发表于 09-20 06:24
【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
的动作流程如图1.5所示。根据种植基地的种植特点草莓种植行列规范,实验样机仅对单列种植进行实验,对于多行的采摘在后续的工业样机中根据导航方式实现。
图1.4草莓架与采摘机器人
图1.5整机采摘
发表于 08-16 17:35
自编程机器人,售后难做吗?
自编程是如何完成的。
自编程其实也不是很高深的问题。
当用户给出参数时,有时也包括逻辑。
例如用户说,如果设备打开完毕,执行一个命令。
这个例子就包括了一个如果。你的智能机器人只需要生成一个
发表于 06-08 16:20
如何快速地让机器人投入生产
机器人也是一种设备,它主要内容是完成一个制造的其中一个功能。
制造一个产品,可以分为几个部件。和装配几个部件。
一个部件,可以是一个模具。或者由机器人完成组成一个模具。
机器人主要完成的是一些模具
发表于 06-06 16:18
机器人如何计算简单的运动
模型要具备齿轮,导轨几种基本的运动原理。
要分辨基本图形,视觉模型要能分辨圆形,方形和三角形。
有了这两点,机器人就基本上能计算开模和注塑这种简单的工作了。要替代人类的工作,还要进一步学习。
发表于 05-19 20:40
浅谈儿童陪护机器人
儿童陪护机器人中得到了广泛应用。
在儿童陪护机器人中,步进电机芯片主要用于转动控制。在此过程中,控制器通过对步进电机芯片输出的脉冲信号进行控制,使得步进电机以一定的步距旋转,从而实现机器人
发表于 05-11 15:12





 工商网监
工商网监
评论