 Velodyne Lidar提供精确、强大的移动绘图
Velodyne Lidar提供精确、强大的移动绘图
Velodyne Lidar提供精确、强大的移动绘图。
据麦姆斯咨询报道,Velodyne Lidar, Inc.近日宣布推出的NavVis VLX可穿戴式室内移动绘图系统配备Velodyne激光雷达传感器,可提供高质量3D测量数据捕获。NavVis VLX专为在建筑工地和多层高楼等复杂的建筑环境中捕获现实而设计。
每套NavVis VLX系统都使用两台Puck LITE传感器来捕获点云数据,以创建建筑文档,包括平面图、3D模型和数字孪生(digital twin)。NavVis VLX将Velodyne图像数据与NavVis同步定位与地图构建(SLAM)技术相结合,可通过移动设备提供测量级点云。其紧凑的通用设计使该系统能够绘制小的、分散的和狭窄的空间,以及有着大量障碍和不平坦地形的环境。
NavVis首席技术官Georg Schroth表示:“Velodyne传感器为我们的移动绘图系统提供实时3D数据。这种宝贵的输入已在开发业界领先的SLAM算法方面发挥重要作用,而这些算法能够为我们的旗舰移动绘图系统NavVis M6提供支持。现在,我们推出NavVis VLX,这款互补设备在紧凑的通用设计中采用了相同的突破性SLAM技术。我们非常高兴Velodyne能参与我们的工作,为激光扫描专业人员提供能够带来测量级结果的快速、高效的建筑物扫描工具。”
Velodyne Lidar欧洲执行董事Erich Smidt表示:“NavVis移动绘图系统可捕获实际建造文档所需的数据,例如3D模型和平面图,以及用于企业制造设施的实际数字工厂。利益相关者可以检查、记录和共享有关建筑物和工厂的信息,以跟踪里程碑,计划搬迁,改善客户和员工的体验。NavVis VLX系统充分展示了企业如何借助Velodyne传感器的性能、范围和紧凑的外形构建创新的系统。这款解决方案可满足AEC公司、测量师和激光扫描专业人员的专业移动绘图需求。”
Velodyne Puck LITE传感器可提供高分辨率图像,用于测量和分析室内外环境。Puck LITE专为需要重量轻、体积小的传感器的应用而设计,为移动和无人飞行器(UAV)/无人机应用提供出色的分辨率和性能。它提供完整的360度全景环境视图以及实时3D数据。
关于Velodyne Lidar
Velodyne致力于为自动驾驶和驾驶辅助提供智能、强大的激光雷达解决方案。Velodyne总部位于加州圣何塞,以其突破性的激光雷达传感器技术组合而闻名于世。2005年,Velodyne的创始人David Hall发明了实时环绕视图激光雷达系统,成为Velodyne Acoustics的组成部分。Hall先生的发明彻底改变了面向汽车、新出行方式、测绘、机器人和安防领域的感知和自主性。Velodyne的高性能产品系列包括广泛的传感解决方案,例如具有成本效益的Puck、多功能型Ultra Puck、自主驾驶高阶型Alpha Prime、经ADAS优化的Velarray以及驾驶辅助用开创性软件Vella。
关于NavVis
NavVis是全球领先的、面向企业的室内空间智能技术和解决方案的提供商,深受宝马(BMW)、戴姆勒(Daimler)、安联(Allianz)、联想和德国电信(Deutsche Telekom)等顶级公司的信赖。NavVis通过其强大的室内数字孪生平台(支持在空前的速度和规模下进行精确绘图、专为协作而设计的沉浸式3D可视化,以及开创人工智能定位技术的基于位置的应用程序),帮助企业提高效率和优化经营绩效。NavVis成立于2013年,总部位于慕尼黑,在纽约和上海设有办事处。
-
传感器
+关注
关注
2525文章
48064浏览量
739974 -
激光雷达
+关注
关注
961文章
3646浏览量
186647
原文标题:Velodyne激光雷达应用于NavVis VLX可穿戴式室内移动绘图系统
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
aiSim5激光雷达LiDAR模型验证方法(二)

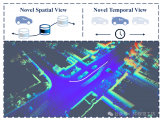
LiDAR4D:基于时空新颖的LiDAR视角合成框架
Valeo为何坚守着LiDAR?
基于LiDAR点流的运动事件检测

基于LiDAR的行人重识别的研究分析

点云处理——将激光雷达数据投影到二维图像

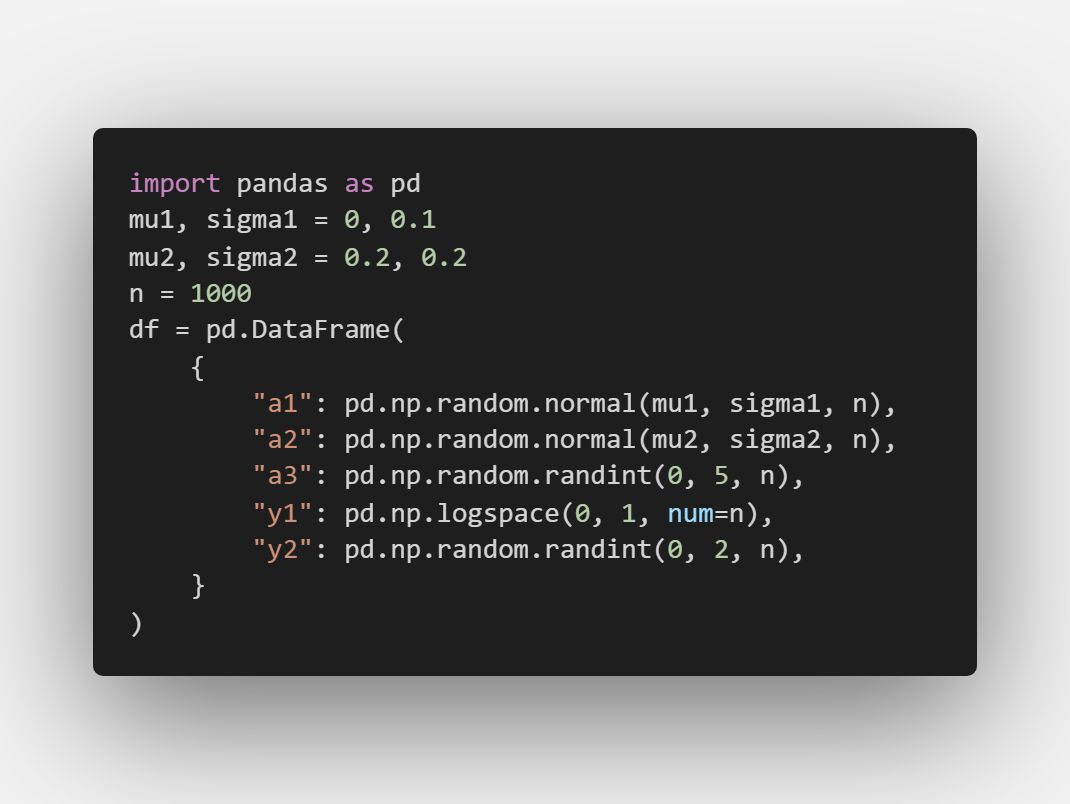
Pandas:Python中强大方便的绘图功能
应用于机器人3D感知的高精度LiDAR与电机驱动解决方案

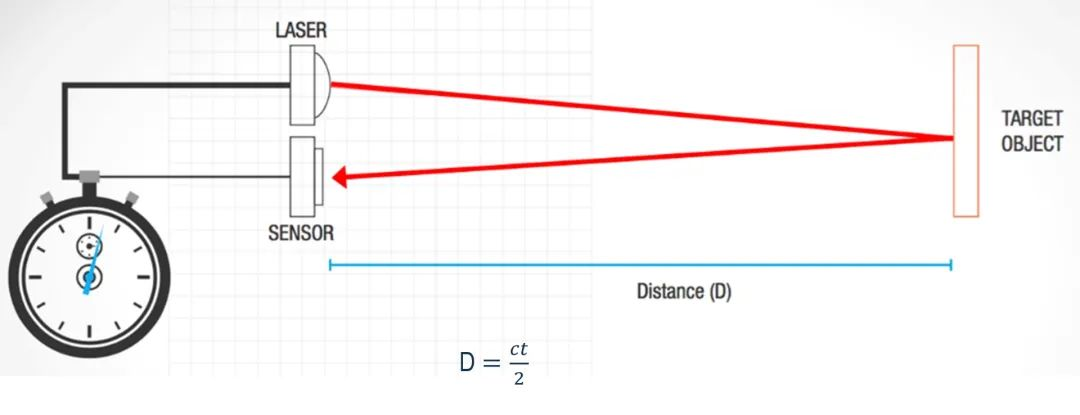
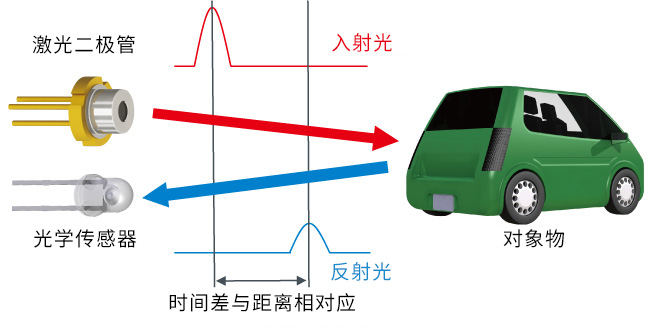
LiDAR如何为自动驾驶汽车提供关键距离传感
什么是LiDAR(激光探测与测距)





 工商网监
工商网监
评论