 关于机器人电柜内的硬件故障的另一解法尝试
关于机器人电柜内的硬件故障的另一解法尝试
之前有遇到过 很多关于机器人电柜内的硬件故障,我思来想去,觉得除了对硬件指示 灯 和KCP报警提示外还有没有更有效的方法呢,毕竟KCP的提示不是很准确.有时 指示灯也能误导人 .

例如:
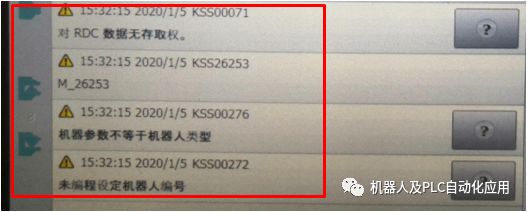
机器人Smarpad信息窗口报警“对RDC数据无存取权”、 “机器人参数不等于机器人类型”、 “未编程设定机器人编号”,更换RDC板卡及电缆、CCU无果,更换控制柜后正常。
KSP(T2)为网络物理连接末站,故驱动总线LED 组出口状态指示灯为熄灭状态,当将其连接至KSP (T1)位置时,出口LED依然不亮.最后他们认为是T2 坏了换了就好了.

这种故障很邪门吧.
于是我在想硬件还有什么更好的处理方法吗?>或思路能更多些吗,不是通过换或者试.下面我只说一下另一思路大家可以试下.
KCB网络

KSB网络

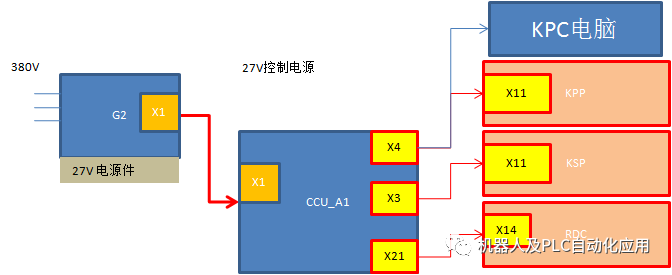
低压电源件用于对下列组件进行供电:,电机制动装置, 外围设备,控制系统电脑,KSP's,KPP,蓄电池, 控制柜风扇, RDC ,smartPAD.
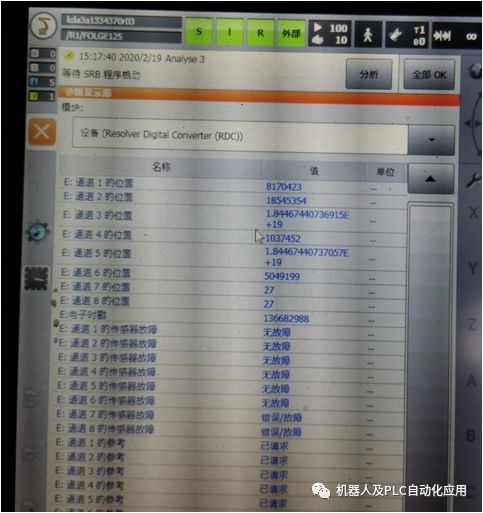
那么有没有对各个硬件诊断的地东西呢? ‘诊断监视器‘
菜单路径:KUKA键 > 诊断> 诊断监视器
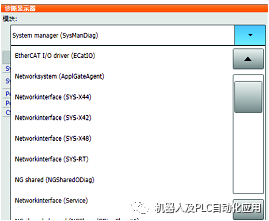

CIB - 控制柜接口板的监控

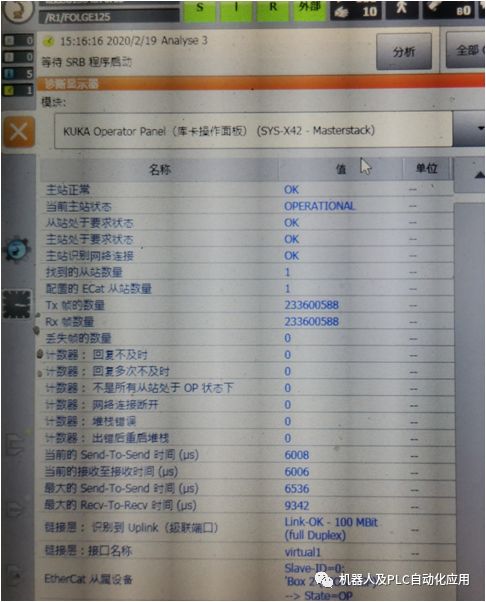
X42库卡 smartPAD操作面板接口

RDC的监控

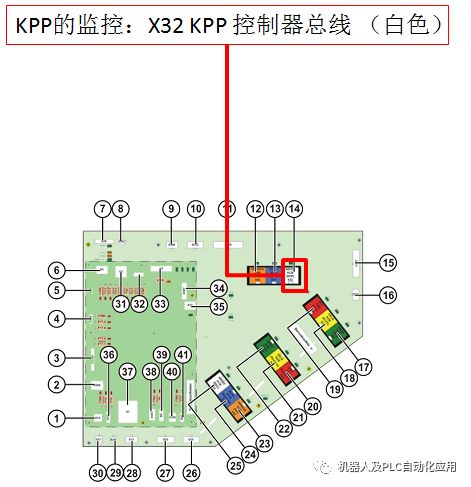
KPP的监控

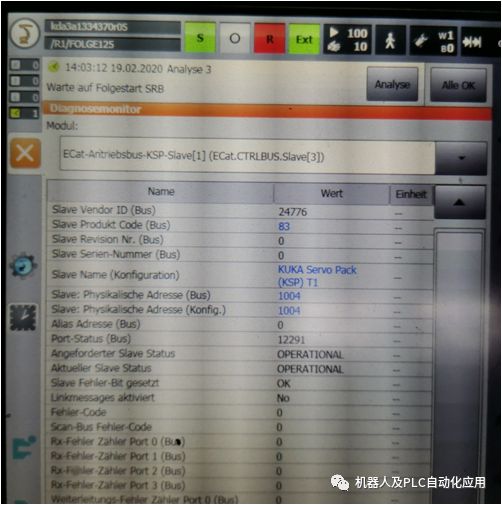
KSP的监控
我只是提出了诊断方法的另一种判断方法。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27021浏览量
201365 -
总线
+关注
关注
10文章
2704浏览量
87204 -
KUKA
+关注
关注
3文章
216浏览量
16258
原文标题:KUKA硬件故障诊断的另一解法尝试
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
高压放大器在介电弹性体折纸术软体机器人中的应用
实验名称:柔性驱动器的性能测试
研究方向:机器人的发展史已经超过了100年,机器人也逐渐从复杂笨重,功能单一的传统机器人进化为更为智能、微型且高集成的多功能
发表于 02-27 17:15
LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核
发表于 12-21 20:03
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递
发表于 11-30 16:01
ai人工智能机器人
的进行监控管理。
智能电话机器人的另一个优势是不知疲倦,不需要休息和喝水,不需要休息。人在工作时就会有各种各样的脾气,但智能电话机器人不会,永远都以最严谨、最周到的态度和客户进行沟通。
在科技高速发展
发表于 09-21 11:09
基于Matlab和VR技术的移动机器人建模及仿真
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
发表于 09-20 06:24
【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
采摘耗时长成本大的问题,提出了一种全向移动的草莓采摘机器人系统方案。
系统的硬件电路主要包括以STM32F407ZGT6为核心的主控制器、电源电路、WIFI模块、激光测距单元、电机驱动模块。系统
发表于 08-16 17:35
profinet转ethernet网关连接发那科机器人配置案例
机器人连接的远程I/O的IP地址即PROFINET转EtherNet网关ethernet端的IP地址;
10、添加一个链接;
11、设置好从站IP(本例为192.168.0.5)厂商ID为
发表于 08-03 17:58
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
,移动机器人导航技术大致可分为以下几种:
01激光导航
激光导航分为激光反光板导航与激光自然导航两种方式:
1、激光自然导航
激光自然导航是一种无需使用反射板的自然导航方式,它不再需要通过辅助导航标志(二维码
发表于 06-28 09:52
自编程机器人,售后难做吗?
自编程是如何完成的。
自编程其实也不是很高深的问题。
当用户给出参数时,有时也包括逻辑。
例如用户说,如果设备打开完毕,执行一个命令。
这个例子就包括了一个如果。你的智能机器人只需要生成一
发表于 06-08 16:20
机器人如何计算简单的运动
模型要具备齿轮,导轨几种基本的运动原理。
要分辨基本图形,视觉模型要能分辨圆形,方形和三角形。
有了这两点,机器人就基本上能计算开模和注塑这种简单的工作了。要替代人类的工作,还要进一步学习。
发表于 05-19 20:40
浅谈儿童陪护机器人
儿童陪护机器人越来越受到人们的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被广泛应用于儿童陪护机器人中的转动控制。本文将从步进电机芯片的工作原理、优势和
发表于 05-11 15:12





 工商网监
工商网监
评论