 抓手USER:TECH2_ Koll_Ueb 过载报警设置
抓手USER:TECH2_ Koll_Ueb 过载报警设置
功能:--力矩报警--
例:
TECH2_ Koll_Ueb Betriebsart =Lernen Stop Bereich = 1 Offset = 5 EIN
------------
VW_USR_R (#USR_ADV,204,1,2,1,5,1,2,TRUE)
P1=1 P1=1 测量力矩 P1=2 -激活使用力矩监控
P2=2改变个轴的力矩范围
P3=1使用的数组
P4=5偏差补偿值
P5=1
P6=2
P7=TRUE
ADC : 预先执行
CASE 204
IF(PAR7==TRUE)THEN
WHILE((PAR4<1) OR (PAR4>40)) --检查P4的补偿值-是否在(1-40)之间
MLD(29,#QuitMsg);
ENDWHILE
ENDIF
MAIN: 到达位置后停止
CASE 204 ;
Index=PAR3-P3=1使用的数组
KOLL_DAT[1]={A1 8,A2 19,A315,A4 9,A5 12,A6 13}
IF(PAR7==TRUE)THEN
WHILE(PAR2<1) OR (PAR2>2) -检查P2值得设置范围
MLD(30,#QuitMsg)
ENDWHILE
;
SWITCH PAR1 -P1=1
CASE 1
IF PAR2==1 THEN - P2 =1 初始化力矩值得范围-
FOR i=1 to 6
$TORQ_DIFF[i]=0
ENDFOR
Koll_dat[Index].A1=0
Koll_dat[Index].A2=0
Koll_dat[Index].A3=0
Koll_dat[Index].A4=0
Koll_dat[Index].A5=0
Koll_dat[Index].A6=0
ENDIF
IF PAR2==2 THEN 改变个轴的力矩范围
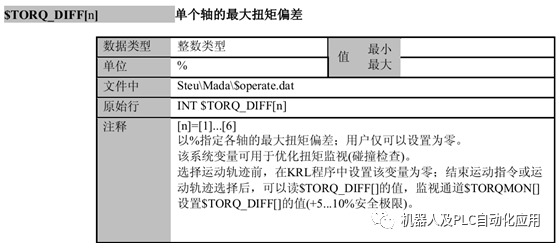
IF($TORQ_DIFF[1])>(Koll_dat[Index].A1)THEN
$TORQ_DIFF[1] A1轴的最大扭矩偏差
Koll_dat[Index].A1=$TORQ_DIFF[1]+PAR4 算出新的A1轴的力矩
ENDIF
IF($TORQ_DIFF[2])>(Koll_dat[Index].A2)THEN
$TORQ_DIFF[2] A2轴的最大扭矩偏差
Koll_dat[Index].A2=$TORQ_DIFF[2]+PAR4
ENDIF
IF($TORQ_DIFF[3])>(Koll_dat[Index].A3)THEN
Koll_dat[Index].A3=$TORQ_DIFF[3]+PAR4
ENDIF
IF($TORQ_DIFF[4])>(Koll_dat[Index].A4)THEN
Koll_dat[Index].A4=$TORQ_DIFF[4]+PAR4
ENDIF
IF($TORQ_DIFF[5])>(Koll_dat[Index].A5)THEN
Koll_dat[Index].A5=$TORQ_DIFF[5]+PAR4
ENDIF
IF($TORQ_DIFF[6])>(Koll_dat[Index].A6)THEN
Koll_dat[Index].A6=$TORQ_DIFF[6]+PAR4
ENDIF
ENDIF
CASE 2 P1=2 -激活使用力矩监控-
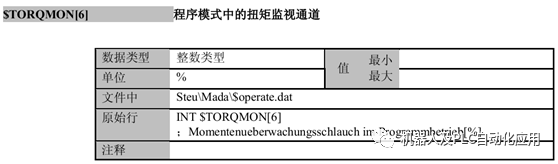
IF PAR2==1 THEN P2=1 使用原有参数改变程序模式时的力矩监控范围-
$TORQMON[1]=Koll_dat[Index].A1
-$TORQMON[1]程序模式中对1轴的力矩监控范围通道-
$TORQMON[2]=Koll_dat[Index].A2
$TORQMON[3]=Koll_dat[Index].A3
$TORQMON[4]=Koll_dat[Index].A4
$TORQMON[5]=Koll_dat[Index].A5
$TORQMON[6]=Koll_dat[Index].A6
ENDIF
IF PAR2==2 THEN P2=2 直接给力矩监控范围为200
FOR i=1 to 6
$TORQMON[i]=(200-KOLL_RED) -KOLL_RED=0
ENDFOR
ENDIF
DEFAULT
MLD(20,#QuitMsg) -如果P1等于除了1和2 的其他值提示错误-
ENDSWITCH
ENDIF
-------------------------------------------------
常用力矩变量:
-
力矩
+关注
关注
0文章
28浏览量
9650 -
User
+关注
关注
1文章
27浏览量
10709 -
过载
+关注
关注
2文章
103浏览量
20000
原文标题:抓手USER:TECH2_ Koll_Ueb 过载报警设置
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
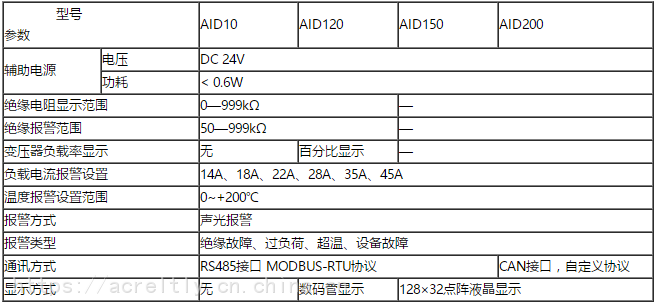
医用剩余电流监测报警 安科瑞AID120 超温设备故障报警 远程设置报警值

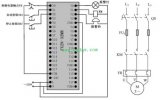
如何使用PLC实现过载报警控制
电机过载保护是什么原因造成的 电机过载保护怎么解决
变压器能不能过载?防止过载危害的措施
机器人末端抓手的工作原理及结构设计

G120变频器驱动电机,出现报警F7011是什么原因?
浅析机器人定位抓手的使用原则

请问starfive-tech/VisionFive2代码库可否在gitee开个镜像?
分线报警主机红外报警
如何创建OTA文件:user1.bin/user2.bin?
机器人末端抓手的结构及工作原理
SR570维修斯坦福电流放大器维修过载报警最新案例





 工商网监
工商网监
评论