 Google的AI教会机器人学会了新的技能
Google的AI教会机器人学会了新的技能
(文章来源:教育新闻网)
谷歌和加州大学伯克利分校的研究人员在本周在预印本服务器Arxiv.org上发表的两篇论文中描述了新的AI和机器学习技术,这些技术使机器人能够适应从未见过的任务并抓住被遮挡的物体。第一项研究详细介绍了X射线,该算法在部署到机器人上时可以搜索对象的堆以掌握目标对象,而第二项研究则提出了一种策略适应技术,可以“教”机器人技能,而无需从头开始进行模型训练。
抓机器人是一个非常困难的挑战。例如,机器人努力执行所谓的“机械搜索”,即当他们不得不从一堆其他对象中识别并拾取一个对象时。大多数机器人不是特别适应性强,并且缺乏足够功能强大的AI模型来指导机械手进行机械搜索。X射线和策略调整步骤可以构成产品包装系统的基础,该产品包装系统可以在无需人工监督的情况下发现,拾取和放下各种物体。
有关X射线的研究的合著者指出,由于缺乏合适的模型,机械搜索(在大量对象中找到对象)仍然具有挑战性。X射线结合了遮挡推断和假设预测来解决该问题,它可用来估计与对象最相似的边界框(对象周围矩形边框的坐标)的占用率分布,同时考虑各种平移和旋转。
X-Ray假定堆中至少有一个完全或部分被未知对象遮挡的目标对象,并且每个时间步最多可以抓取一个对象。以RGB图像和目标对象为输入,它可以预测场景的占用率分布和分割蒙版,并计算几种潜在的抓握动作,以最高的成功概率执行该动作。为了训练和验证X射线,研究人员生成了10,000个增强深度图像的语料库,这些图像标记有矩形框目标对象的对象占用分布。他们从Thingiverse上的1296个3D CAD模型的开放源数据集中进行采样,选择了10个大小相同,体积较小但厚度较小的盒子目标,因此它们更有可能被遮挡。这使他们总共获得了100,000张图像。
在这10,000张图片中,约有8,000张被保留用于培训,其余的则留作测试。使用一千个包含模拟对象(盖子,多米诺骨牌和长笛)的其他图像来评估X射线对看不见的形状,对象,长宽比和比例尺的概括。在涉及带有吸盘和平行颚式抓爪的真实ABB YuMi机器人的物理实验中,研究人员要求X射线将物体装满垃圾箱,然后将垃圾箱倾倒在目标物体的顶部。在最初包含25个对象的堆中,系统在20次试验中以5个动作的中位数提取了目标对象,成功率为100%。
合著者将精力放在未来的工作上,以提高X射线的训练效率,并分析数据集大小以及用于生成训练分布的平移和旋转次数的影响。他们还计划根据目标对象可见性的奖励来探索强化学习策略。
在这两篇论文的最新文章中,合著者试图开发一种能够不断适应新的现实环境,物体和条件的系统。与大多数机器人相反,后者仅需训练一次即可部署,而适应能力却很少。研究人员对机器学习模型进行了预训练,以在608,000次尝试抓取的语料库中抓取一系列对象,然后他们执行的任务是使用向其起始位置右移10厘米的抓手抓取对象。系统练习了一段时间(经过800次尝试)并将这些尝试记录到新数据集(目标数据集)中之后,新尝试在50%的时间内与原始数据集进行了混合,调整模型。
在五个不同的场景中重复了这些步骤-预训练,尝试新任务和微调。一方面,刺眼的光线阻碍了机器人的摄像头。在另一种情况下,棋盘图案的背景使模型难以识别对象。最后,实验人员让机器人抓住训练中看不到的透明瓶子(众所周知,透明物体很难抓住机器人,因为它们有时会混淆深度传感器),并捡拾坐在高反射金属板上的物体。
研究人员报告说,在实验中,该模型成功地在苛刻的灯光下63%的时间,透明瓶子的74%的时间,棋盘垫板的时间的86%的时间,抓手扩展的88%的时间成功地捕获了物体,和91%的时间使用偏置夹持器。而且,他们说,机器人适应新情况只需要花费1-4个小时的练习时间(相比之下,学习如何掌握的时间大约为6,000个小时),并且性能不会随着所适应的模型而降低。
(责任编辑:fqj)
-
谷歌
+关注
关注
27文章
5845浏览量
103242 -
AI
+关注
关注
87文章
26396浏览量
264001
发布评论请先 登录
相关推荐
NVIDIA Isaac机器人平台升级,加速AI机器人技术革新
机器人学习中主流智能抓取方案
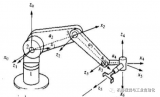
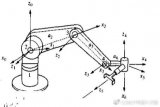
机器人中都有哪些坐标系

Eureka!NVIDIA 研究突破为机器人学习注入新动力
Eureka!NVIDIA 研究突破为机器人学习注入新动力

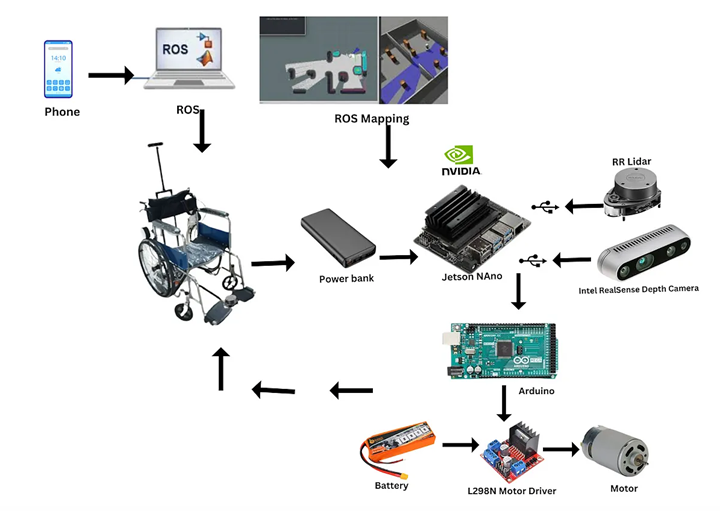
机器人学专业学生利用 NVIDIA Jetson 开发出自主轮椅
利用Arduino让机器人学会识别标识并作出行为
ai人工智能机器人


技能提升!大族协作机器人中级技能培训顺利完成

将工业机器人装配任务从仿真转为现实
将工业机器人装配任务从仿真转为现实





 工商网监
工商网监
评论