 百度无人驾驶汽车的转弯动作怎么完成
百度无人驾驶汽车的转弯动作怎么完成
在该项专利技术中,无人驾驶汽车进行深度学习使得它的转向率尽可能地接近于人类的水平,也即使得这个成本函数尽可能的小。
集微网消息,去年在人工智能政策及智能网联汽车道路测试规则体系新闻发布会上,长沙市政府颁发49张自动驾驶测试牌照。其中,百度Apollo获得45张,并在长沙正式开启大规模测试,为2019年的无人驾驶载客运营做好政策和技术准备。至此,百度累计获得全国各地政府颁发的牌照数量超百张。
无人驾驶车辆是指被配置为处于自动驾驶模式下的车辆,这种车辆在极少或者没有驾驶员干预的情况下通过导航来行驶。尤其是在面对各种弯道时,更加要求车辆能够及时、迅速的拐弯,这就对于无人驾驶车辆的转弯系统提出了很大的要求。
其实早在17年的5月24日,百度就申请了一项名为“动态调整自动驾驶汽车的转向率的方法”的发明专利(申请号为:201780003089 .9),申请人为百度(美国)有限责任公司。
根据目前公开的专利申请文件,让我们一起来了解一下无人驾驶车辆是如何完成转弯动作的吧。
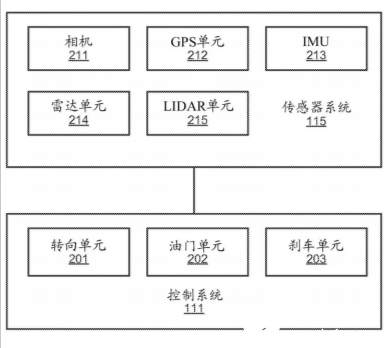
首先,在百度的无人驾驶系统中,每一辆无人驾驶车辆的结构如上图所示,每辆车都包含有传感器系统和控制系统。传感器系统包含有多个摄像机、全球定位系统(GPS)、惯性测量单元、雷达以及光探测和测距单元。这些传感器可以提供关于自动驾驶车辆的位置信息。
除此之外,每辆无人驾驶车辆的方向盘、油门、车轮等关键形式部位也安装了传感器,例如转向传感器、油门传感器以及音频传感器等。正是有了这些传感器,无人驾驶车辆才能实现对于自身状态的实时检测以及顺利完成转向任务。
当然控制系统也是不可缺少的,如果说传感器系统是无人驾驶车辆的眼睛,那么控制系统就是无人驾驶车辆的大脑。其中主要包括转向单元、油门单元以及刹车单元。
今天我们着重来说明转向单元,他用来调整车辆的方向或者前进方向。而转向技术中主要使用到的就是转向率这个技术指标,它决定了汽车可以转过多大的角度,可以通过多大的弯道。
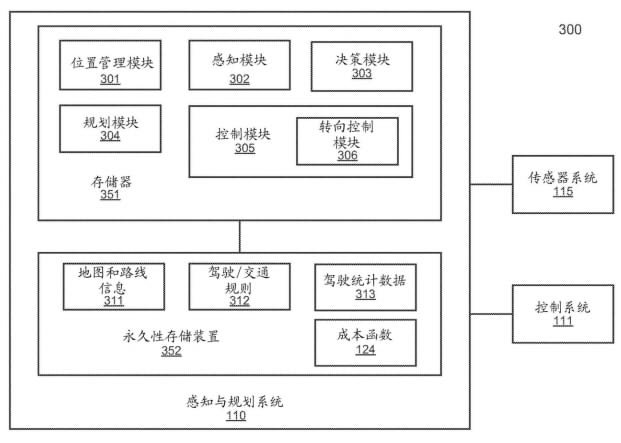
无人驾驶采用人工智能算法来完成转向任务,简而言之,无人驾驶汽车就是不断的学习和模仿人们的开车姿势从而达到自主开车的目的。人们在开车时,面对不同大小的弯道,人们总是可以凭借经验来转动方向盘从而通过弯道,而对于无人驾驶汽车来说,我们会定义一个成本函数,用于确定对于待达成的特定转向率的成本,成本函数可以包括一个或者多个个体成本函数,用于计算一个或者多个个体。
而无人驾驶汽车学习的目的,就是使得它的转向率尽可能地接近于人类的水平,也即使得这个成本函数尽可能的小。如上图所示,传感器系统依旧用于采集车辆的各种状态信息,控制系统则用于控制车辆状态。
针对于不同的路况,决策模块决定了如何通过这些不同的路况,决策模块可以根据诸如驾驶或者交通规则来做出此类决定,这些规则就存储在永久性存储装置中。有了这些硬件和软件的基础,无人驾驶车辆就可以完成转向任务了。
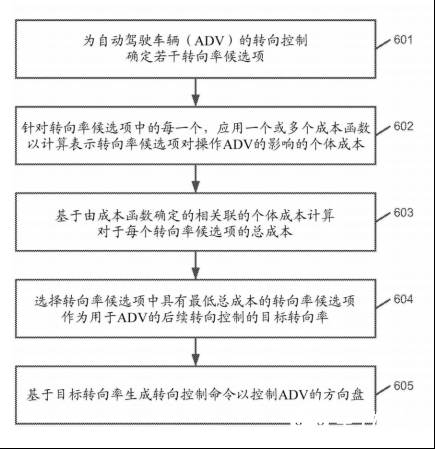
如上如所示是用于操作自动驾驶车辆的转向的过程,通过软件以及硬件的组合来完成这个流程。
首先,处理逻辑确定用于自动驾驶车辆的若干转向率候选选项,这里用到了多个成本函数,以便于计算转向率对于自动驾驶车辆的不同影响。
其次,通过不同的成本函数来确定控制转向率的总成本,在候选转向率的选项中选择具有最低总成本的转向率作为自动驾驶车辆的转向率。
最后,通过目标转向率生成转向控制命令用于控制无人驾驶车辆的方向盘,这里需要软件和硬件的配合,才能完成一次车辆的正确转弯。
以上就是集微网带给大家的关于百度研究的无人驾驶车辆是如何确定转向率的专利解密,相信这个技术也势必为百度的无人驾驶技术增加更多的竞争力。看似神奇的自动转弯技术的背后也充满着科技人员们的辛勤汗水与付出,我们也期待无人驾驶技术能够更早的出现在我们的生活之中。
-
百度
+关注
关注
9文章
2167浏览量
88918 -
无人驾驶
+关注
关注
97文章
3876浏览量
118961
发布评论请先 登录
相关推荐
用于自动驾驶,无人驾驶领域的IMU六轴陀螺仪传感器:M-G370
吉利完成全球首个汽车无人驾驶漂移,拟明年启用AI数字底盘技术

32.768K晶振X1A000141000300适用于无人驾驶汽车电子设备

完成4.5亿元股权融资!易控智驾跑出矿山无人驾驶规模化落地“加速度”
无人驾驶车辆的反馈控制介绍
沉重一击!通用汽车暂停无人驾驶业务
无人驾驶汽车的安全挑战及其影响

工业路由器助力无人驾驶方案解析
无人驾驶汽车的路径规划与跟随控制算法案例
友道智途获全国首批无人驾驶路测牌照
自动驾驶、自主驾驶、无人驾驶有什么区别






 工商网监
工商网监
评论