 ReID行人重识别再破行业新高,多目标定位与追踪精准呈现
ReID行人重识别再破行业新高,多目标定位与追踪精准呈现
ReID行人重识别再破行业新高,
多目标定位与追踪精准呈现
测评专家介绍:
梅 林:公安部第三研究所研究员
韩国强:广东省计算机学会理事长、原华南理工大学计算机学院院长
主临宁:深圳自动化学会会长、中国社会科学院特约研究员
目前AI人脸识别技术在安防行业落地较多,同时也是人工智能应用发展的主要方向之一。现有的人脸识别受摄像机安装高度和角度等因素影响,多是拍到行人的头顶、后背、侧脸;或因摄像机抓拍的人脸像素不够,以及故意伪装等原因,导致无法识别目标,给各个应用场景带来了诸多限制与不便。同时,在很多实际应用场景中,需对非协作式人员进行实时、连续的不间断定位与追踪,以缩短视频查找目标的时间,为精准处置、调度及管理争取更多的应对条件。
广州海格星航信息科技有限公司(以下简称“海格星航”)推出了超维智脑定位与追踪平台,融合了自主研发的AI人工智能核心算法ReID行人重识别和VSLAM视觉定位、轨迹补偿等多项先进技术,该平台可利用现有的普通高清摄像机,实现在室内外等复杂立体环境下对多目标人物的主动定位及连续追踪。
通用数据集测试,ReID行人重识别首位命中率再破行业新高
近日,海格星航在AI人工智能领域中的ReID行人重识别算法取得重大技术突破,在人体特征提取方面取得“星”成就。通过采用残差网络和引入注意力机制,提升了对人体整体特征的识别度,增强了对人体细节特征的辨别能力;此外,通过融合多种损失函数,采用标签平滑、数据增强等方法,大大提升网络训练收敛速度,具有更好的泛化能力。A&S传媒邀请了公安部第三研究所和安防行业内的专家、教授,对该算法进行实测。
图1.专家测评现场
在测试中,海格星航的ReID行人重识别算法在三大国际权威公开数据集Market1501、DukeMTMC-reID和CUHK03上,各项测试结果在目前已公开指标数据的厂商中均取得第一的好成绩,再次刷新行业新高。其中,在Market1501数据集的首位命中率(Rank-1)与平均精度均值(mAP)更是分别达到97.54%、94.77%。在园区实战环境中,识别率达到90%以上,已具备成熟商用的水平。经过多年的努力,海格星航已积累了在AI人工智能领域的核心自主技术能力。
通用数据集测试,海格星航的ReID行人重识别算法的三大国际权威公开数据集测试结果如下:
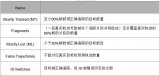
海格星航ReID行人重识别算法与主流厂商ReID行人重识别算法性能指标对比如下:
表格1:基于已公开指标数据的厂商汇总统计,数据来源于企业官方网站,截止时间为2019.10.19。
实战测试,目标定位与追踪实时精准呈现
在测评中,安装了不同方向的6台摄像机,监控覆盖测试区域。将参与测试人员设置为追踪目标。
1 召回率测试
实测中,从视频画面点击目标对象进行追踪,目标按正常速度行走时,平台可迅速识别并追踪,行走路线轨迹分析定位准确。实测结果显示相机召回率均达到100%。
图2.召回率测试示意
2 目标隐藏后重识别测试
实测中,目标隐藏重新出现后仍可以正常识别。同时,平台结合三维室内地图与轨迹补偿技术,对目标行走轨迹分析及模拟补偿,补偿分析的轨迹与测试人员实际行走轨迹一致。
专家出题测试,平台可适用多种不同场景,实战性强
本次测评中,现场专家结合实际应用的需求,提出了不同的测试场景,实战测试都取得了不错的效果。专家现场提出的各测试场景及结果如下:
1 目标快速移动时识别测试
当目标移动速度超过10KM/时(约3倍于正常行走速度),仍可以追踪识别目标。
2 目标曲线移动时识别效果测试
追踪目标按曲线移动时,可以正常识别,并准确刻画实时轨迹。
图3.目标追踪轨迹呈现
3 隐藏目标重识别效果测试
在追踪目标消失隐藏几分钟后,平台未产生任何误识别;追踪目标重新在出现摄像机画面后,被平台在1秒钟之内重新识别并追踪。
4 多目标跟踪
实测中,当多个目标以正常速度行走时,平台定位跟踪精准,多人跟踪与单人跟踪效果一致。
图4.多人识别跟踪效果
5 目标侧面识别跟踪效果测试
设置跟踪目标时选择侧面,跟踪效果与设置目标时选择正面效果一致。均可以迅速识别并追踪。
6 目标部分遮挡识别跟踪效果测试
遮挡跟踪目标部分身体或者脸部,以及坐下缩小目标面积等情况,该平台仍然能够正常识别目标并跟踪。
图5.遮挡人脸及部分人体
人脸、穿着、体态综合分析应用场景广阔
海格星航超维智脑定位与追踪平台目标实时定位精度高,室外定位精度在2米以内,室内精度可达到1米以内,与传统基于摄像机目标轨迹呈现模式相比,该平台目标定位更准确、更连续,可利用性更高,可以有效进行原有设备利旧,实用性更高。
目前人脸识别应用广泛,但在人脸遮挡、伪装的情况下,目标跟踪丢失可能性剧增。海格星航超维智脑定位与追踪平台采用人脸、穿着、体态等多种识别方式,在被追踪目标更换衣服、遮挡人脸等伪装情况下,仍可以实现识别与连续追踪。该平台采用的综合模糊算法具有比单独的人脸识别算法更加广阔的应用空间,场景适应性更强。
该平台的市场定位为商业及办公大楼、园区、机场、边检站、车站、部队营区等室内及室外立体环境下应用,能实现对目标的快速布控、智能识别、室内高精准定位与追踪、历史轨迹回溯等完整的业务流程管理,可广泛应用于公安反恐、重点机关安防管控、寻人找人、机场管理、商场精准画像与营销分析等丰富多样的场景,有效节省大量人力物力,并提高工作效率,为公共安全、社会管理、智慧交通、智慧零售等领域创造巨大的商业价值,应用前景非常广阔。
平台亮点
可利用现有高清摄像机,在室内外复杂立体环境下对非协作式目标进行主动识别、定位及连续追踪,实战性强。
可支持利用人脸、衣着、体态等多种特征,对目标进行快速、精准的识别,场景适应性强。
多项技术创新设计,融合了ReID行人重识别、机器学习、视觉定位、轨迹补偿及AR标签视景等新技术。
室内定位精度可达1米左右,定位精准度高。
测试过程跨镜追踪成功率100%,实战环境90%以上,稳定性高。
专家点评
海格星航超维智脑定位与追踪平台除了采用人脸识别、视频结构化和轨迹补偿技术外,还采用ReID行人重识别、视觉定位、AR标签视景等新技术,实现在复杂立体环境下对非协作目标的主动定位及连续追踪。
该平台采用的综合模糊分析算法,能根据客户和应用场景的需要,进行相应的调节,针对移动目标的检测和定位更加准确、稳定、可靠,使得其在垂直领域中拥有更强的竞争力,更能够获得市场的青睐。
梅林点评
该平台利用人的生物特征,如人脸、步态、衣服色彩等,实现在立体环境下对非协作目标的主动定位及连续追踪,应用场景广,识别率较高。在业界已经公开的测评数据中领先,实战效果领先。
韩国强教授点评
海格星航的多目标跨镜追踪系统,创新地把BIM信息、行人重识别、空间坐标映射等技术集成在一起,给用户提供了新的交互体验,追踪性能也达到了国际领先水平,尤其是对于有时有遮挡的情况,仍可继续跟踪。系统可广泛应用于机场、车站、广场等对特定目标的在线或离线追踪。
主临宁会长点评
不同于大多数人脸识别,单一以人脸特征为算法主要依据,该系统采用以人脸特征、形态、环境、色彩等综合因素为依据,识别范围更广,识别率更高。在多个监控点之间的图像切换无缝对接,使跟踪连续性更好。该平台应用场景广泛。
-
人工智能
+关注
关注
1776文章
43813浏览量
230573 -
人脸识别
+关注
关注
76文章
3954浏览量
80554 -
数据集
+关注
关注
4文章
1178浏览量
24347
原文标题:【a&s功能实测】海格星航超维智脑定位与追踪平台
文章出处:【微信号:asmag001,微信公众号:安全自动化】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
以色列人工智能目标定位系统实力如何
开发者手机 AI - 目标识别 demo

基于LiDAR的行人重识别的研究分析

基于随机有限集的多传感器多目标跟踪技术

高精度电子定位器 精准定位从细微之处了解YSO110TR在电子跟踪定位器体现出的优势
基于CmBacktrace库,如何快速追踪和定位产生HardFault的原因
水下GPS定位的系统组成和定位原理

【KV260视觉入门套件试用体验】4.机器视觉支持ReID加速应用AIBox测试
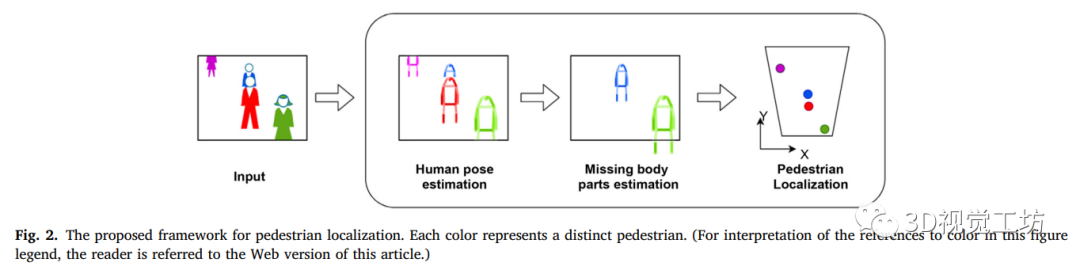
基于单张RGB图像定位被遮挡行人设计案例
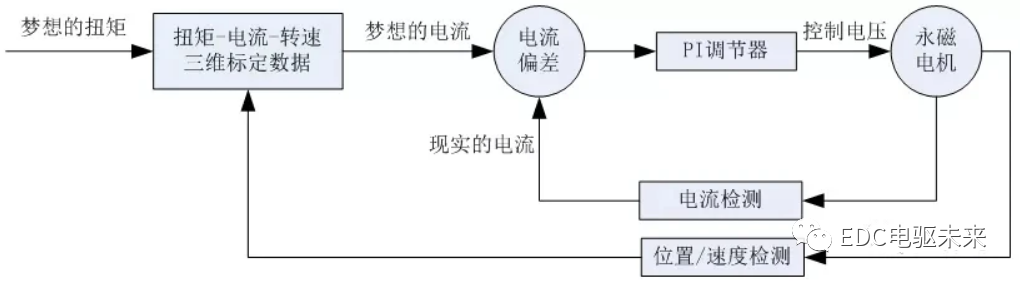
什么是电机标定?电机标定的工作原理
手眼标定(九点法)
基于机器视觉的典型多目标追踪算法应用实践
LSD中的激光点云/单目3D目标检测和多目标跟踪算法






 工商网监
工商网监
评论