 LiDAR的工作原理
LiDAR的工作原理
无人驾驶汽车是1990年代最大的技术幻想之一(由诸如“ The Love Bug”和“ Demolition Man”等早期电影推动),由于多种技术尤其是 LIDAR 。
什么是LiDAR?
LIDAR (代表光检测和测距)是一种测距技术,它通过在目标上发射光束来测量物体的距离,并使用反射光束的时间和波长来估计距离,并且在某些应用中(激光成像),创建对象的3D表示。
虽然激光背后的想法可以追溯到1930年EH Synge的工作,但直到1960年代初期,激光发明之后。它本质上是将激光聚焦成像与使用飞行时间技术计算距离的能力相结合,它在气象学(用于测量云)和空间中(在其中激光高度计用于绘制地图)的最早应用中得到了应用。阿波罗15号任务期间的月球表面。从那时起,该技术得到了改进,并已用于多种应用中,包括:检测地震活动,海洋学,考古学和导航等。
LiDAR的工作原理
与RADAR(舰船和飞机使用的无线电波导航)和SONAR(水下的物体探测和使用声音的导航,主要由潜艇使用)非常相似,它们都使用波的反射原理进行物体探测和距离估计。但是,虽然RADAR是基于无线电波,而SONAR是基于声音,但 LIDAR是基于光束(激光)。
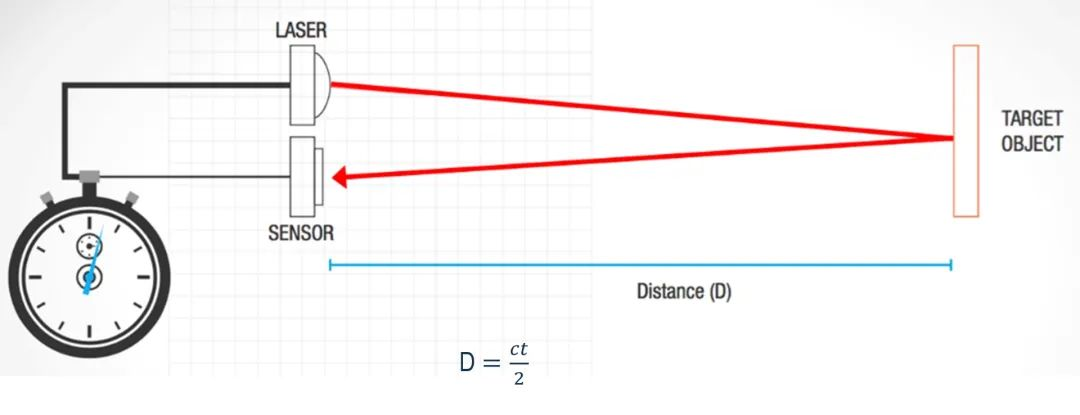
LIDAR使用不同波长的光,包括:紫外线,可见光或近红外光来使物体成像,并因此能够检测到各种物质成分,包括;非金属,岩石,雨水,化合物,气溶胶,云甚至单个分子。 LIDAR系统可以每秒发射多达1,000,000个光脉冲,并使用脉冲反射回扫描仪所花费的时间来确定扫描仪周围物体和表面所处的距离。用于距离确定的技术称为飞行时间,其等式如下所示。
Distance = (Speed of Light x Time of Flight) / 2
在大多数应用中,除了远距离测量外,还创建了光束发射所在的环境/物体的3D地图。这是通过在物体或环境上连续发射激光束来完成的。
重要的是,与在平面镜中获得的镜面反射相反,在LIDAR系统中遇到的反射是后向散射反射,因为光波通过其到达的方向扩散回去。根据应用,LIDAR系统使用不同的反向散射变体,包括瑞利散射和拉曼散射,
LIDAR系统的组成部分
LIDAR系统通常由5个元素组成,无论由于应用而引起的变化,都将预期存在。这些主要组件包括:
激光
扫描仪和光学系统
精确定时电子设备
惯性测量单元和GPS
1。激光
激光是光脉冲的能量来源。由于某些应用的特定要求,激光雷达系统中部署的激光波长因一种应用而异。例如,机载LiDAR系统使用1064 nm二极管泵浦的YAG激光器,而测深系统使用532nm双二极管泵浦的YAG激光器,其穿透水(最长40米)时的衰减比机载1064nm版本要小得多。但是,不管使用哪种应用,使用的激光器通常都是低能量的,以确保安全。
2。扫描仪和光学器件
扫描仪是任何激光雷达系统的重要组成部分。他们负责将激光脉冲投射到表面并接收从表面反射回来的脉冲。 LIDAR系统显影图像的速度取决于扫描仪捕获反向散射光束的速度。无论何种应用,LIDAR系统中使用的光学器件都必须具有高精度和高质量,才能获得最佳效果,尤其是对于制图而言。透镜的类型,特定的玻璃选择以及所使用的光学镀膜是LIDAR分辨率和测距能力的主要决定因素。
根据应用的不同,可以针对不同的应用部署各种扫描方法决议。方位角和仰角扫描以及双轴扫描是一些最流行的扫描方法。
3。处理器
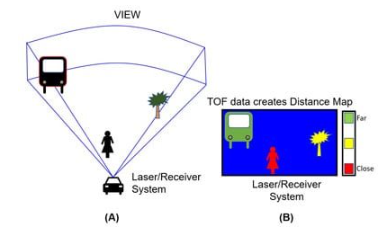
高容量处理器通常是任何LIDAR系统的核心。它用于同步和协调LIDAR系统所有单个组件的活动,以确保所有组件都在应有的状态下工作。处理器将来自扫描仪,计时器(如果未内置在处理子系统中),GPS和IMU的数据进行集成,以生成LIDAR点数据。然后,根据应用程序将这些高程点数据用于创建地图。在无人驾驶汽车中,点数据用于提供环境的实时地图,以帮助避障和一般导航的汽车。
光速约为0.3纳秒/纳秒,通常,由于成千上万的光束反射回扫描仪,所以通常要求处理器具有高速度和高处理能力。因此,计算元件处理能力的提高一直是激光雷达技术的主要驱动力之一。
4。定时电子
精确的定时在LIDAR系统中至关重要,因为整个操作都是按时进行的。计时电子设备代表LIDAR子系统,该子系统记录激光脉冲离开的确切时间以及激光脉冲返回到扫描仪的确切时间。
其精度和准确性不能过分强调。由于散射的反射,发出的脉冲通常具有多个返回,每个返回都需要精确计时以确保数据的准确性。
5。惯性测量单元和GPS
将LiDAR传感器安装在卫星,飞机或汽车等移动平台上时,有必要确定传感器的绝对位置和方向以保持可用数据。这是通过使用惯性测量系统(IMU)和全球定位系统(GPS)来实现的。 IMU通常由加速度计,陀螺仪和磁力计组成,以测量速度,方向和重力,将它们组合在一起即可确定扫描仪相对于地面的角度方向(俯仰,横滚和偏航)。另一方面,GPS提供了有关传感器位置的准确地理信息,因此可以直接对目标点进行地理配准。这两个组件提供了将传感器数据转换为静态点以在各种系统中使用的方法。
使用GPS和IMU获得的额外信息对于所获取数据的完整性至关重要,并且有助于确保可以正确估计到表面的距离,尤其是在移动LIDAR应用程序中,例如在自动驾驶汽车和基于飞机的想象系统中。
LiDAR的类型
虽然LIDAR系统可以基于多种因素进行分类,但存在三种通用的LIDAR系统类型:
测距仪LIDAR
差分吸收LIDAR
多普勒LIDAR
1。测距仪激光雷达
这些是最简单的激光雷达系统。它们用于确定从LIDAR扫描仪到物体或表面的距离。通过使用“工作原理”部分所述的飞行时间原理,反射光束入射到扫描仪上所花费的时间被用来确定激光雷达系统与物体之间的距离。
2。差分吸收LIDAR
差分吸收LIDAR系统(有时称为DIAL)通常用于研究某些分子或材料的存在。 DIAL系统通常会发射两种波长的激光束,选择的波长应使目标分子吸收其中一个波长,而另一个波长则不会。光束之一的吸收导致由扫描仪接收的返回光束的强度的差异(差分吸收)。然后使用这种差异来推论所研究分子的存在水平。 DIAL已用于测量大气中的化学浓度(例如臭氧,水蒸气,污染物)。
3。多普勒激光雷达
多普勒激光雷达用于测量目标的速度。当从激光雷达发射的光束击中朝向或远离激光雷达的目标时,从目标反射/散射的光的波长将略有变化。这就是所谓的多普勒频移-结果就是多普勒激光雷达。如果目标远离LiDAR,则返回光将具有较长的波长(有时称为红移),如果朝LiDAR方向移动,则返回光将具有较短的波长(蓝移)。
将LIDAR系统归类为类型的其他一些分类包括:
平台
反向散射的类型
基于平台的LiDAR类型
使用平台作为标准,LIDAR系统可以分为以下四种类型:
基于地面的激光雷达
机载激光雷达
星空激光雷达
运动激光雷达
这些激光雷达通常会选择不同的结构,材料,波长,外观和其他因素来适应要在其部署环境中使用的因素。
基于反向散射类型的激光雷达
在描述激光雷达系统如何工作时,我提到LIDAR中的反射是通过反向散射。不同类型的反向散射出口及其有时用于描述激光雷达的类型。反向散射的类型包括;
Mie
Rayleigh
Raman
荧光
激光雷达的应用
由于激光雷达的极高的准确性和灵活性,激光雷达具有广泛的应用,特别是高分辨率地图的制作。除了测量之外,LIDAR还被用于农业,考古和机器人领域,因为它目前是自动驾驶汽车竞赛的主要推动力之一,它是大多数具有LIDAR系统功能的车辆中使用的主要传感器。
LiDAR的其他应用有100多种,并将在下面尽可能多地提及。
自动驾驶汽车
3D成像
土地调查
电力线检查
旅游与公园管理
森林保护环境评估
洪水建模
生态与土地分类
污染建模
油气勘探
气象学
海洋学
各种军事应用
细胞网络规划
天文学
LiDAR局限性
LIDAR像其他所有技术一样都有其缺点。在恶劣天气下,LIDAR系统的范围和准确性会受到严重影响。例如,在有雾条件下,由于光束被雾反射,会产生大量的虚假信号。这通常会导致mie散射效应,因此,大部分发射光束不会返回扫描仪。
除了天气,激光雷达系统可能被愚弄(故意地或故意地)以认为物体存在是通过闪烁“灯”。根据2015年发表的论文,对安装在自动驾驶汽车上的LIDAR系统闪烁简单的激光指示器可能会使汽车的导航系统迷失方向,给人的印象是存在物体的地方没有。这种缺陷,特别是在无人驾驶汽车的激光应用中,引发了很多安全隐患,因为劫车者无需花很长时间就可以完善用于攻击的原理。这还可能导致汽车突然停车的事故 。 。 strong》
要结束本文,我们可能应该研究一下LIDAR可能非常适合您的项目的原因以及您应该避免使用LIDAR的原因。
优势
1。高速准确的数据采集
2。高穿透力
3。不受环境光强度的影响,可以在晚上或阳光下使用。
4。与其他方法相比,高分辨率成像。
5。没有几何失真
6。轻松与其他数据采集方法集成。
7。 LIDAR具有最低的人为依存性,在某些人为错误可能影响数据可靠性的应用中非常有用。
缺点
1。激光雷达的成本使其在某些项目中显得过高。最好将LIDAR描述为相对昂贵。
2。在大雨,大雾或大雪条件下,激光雷达系统的性能很差。
3。 LIDAR系统生成的大型数据集需要大量的计算资源来处理。
4。在湍流的水中应用不可靠。
5。取决于所采用的波长,由于某些种类的LIDAR中发射的脉冲在某些高度下无效,因此LIDAR系统的性能会受到一定的限制。
LIDAR对于业余爱好者和制造商
由于激光雷达的成本,市场上的大多数激光雷达系统(如Velodyne激光雷达)都用于工业应用(将所有“非爱好者”应用整合在一起) 。
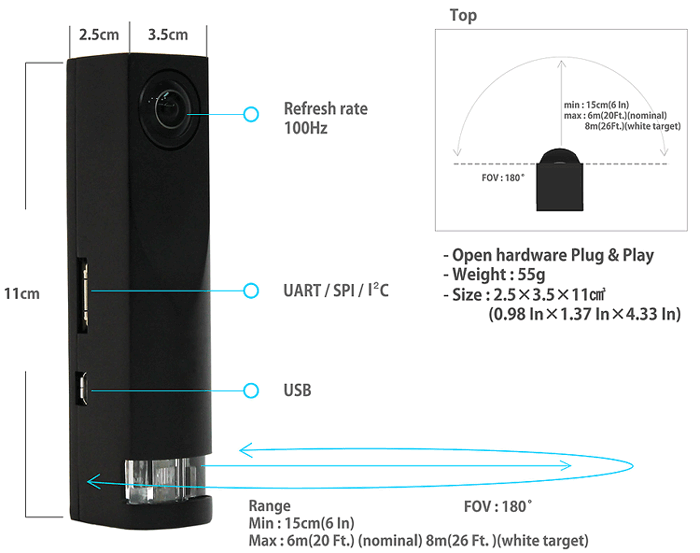
目前最接近“业余级” LIDAR系统的是 iLidar 固态LiDAR。 Hybo设计的传感器。这是一个小型LiDAR系统,能够进行3D映射(不旋转传感器),最大有效范围为6米。该传感器配备了一个USB端口以及一个UART/SPI/i2C端口,通过该端口可以在传感器和微控制器之间建立通信。
iLidar旨在适应所有人,并且与LiDAR相关的功能使其成为现实。对制造商具有吸引力。
责任编辑:wv
-
LIDAR
+关注
关注
10文章
305浏览量
28992
发布评论请先 登录
相关推荐
激光雷达LIDAR基本工作原理


Valeo为何坚守着LiDAR?
什么是激光雷达?LiDAR系统的工作原理及解决方案

基于LiDAR的行人重识别的研究分析

lidar传感器是什么意思

励磁工作原理

振弦采集仪的工作原理及应用范围

LiDAR如何为自动驾驶汽车提供关键距离传感





 工商网监
工商网监
评论