 瑞士保罗谢勒研究所近期成功研制出了一种微型机器人
瑞士保罗谢勒研究所近期成功研制出了一种微型机器人
在机器人领域,不少研究人员会利用仿生学原理,主动模拟那些自然界的鸟类、昆虫等生物,从而让机器人获得与之相近的行动方式及能力。
但模拟千纸鹤的机器人倒是不多见,它可能会在未来某一天,出现在你的身体中,提供治疗或采集数据样本。
来自《自然》杂志的报道称,瑞士保罗谢勒研究所近期成功研制出了一种微型机器人,它只有微米级的体积,能轻松进入到我们人体内部,但外观却和我们平日里常见的千纸鹤非常相似。
据悉,研究人员从纸鹤中获得了设计灵感,并使用了带有磁性的软性材料,让它能在毫秒内就完成扇动翅膀、悬停或是旋转这样的操作,且比金属材质的机器人更适合应用于人体内部。
别小看这种微型机器人的能力,在医疗领域,这些体积微小的机器人能很好的完成各种工作,比如说微创手术,又或者是进入到大脑血管内治疗中风或动脉瘤。
在过去,医疗人员可能会将加装了成像探头的柔性导管伸到人体内部,但如果这些微型机器人能广泛应用在医学上,相信会有效降低手术的风险。
同时,这个机器人还具备了可编程磁极序列的能力,使研究人员能选择性地调整各个结构的磁性强度,组装为特定形状,比如现在图示中的纸鹤造型。由于各部分对磁场的响应不同,整个结构体也能够执行更多复杂的动作。
不过,论体积的话,这个纸鹤机器人并不是现在最小型的。在 2018 年,麻省理工学院便研制出一种用石墨烯制成的微型机器人,只有细胞般大小,形态和粒子差不多。
和其它需要内置电源的机器人不同,这种细胞粒子甚至不需要用到电池,只用光电二极管就能保证足够的行动力,同样适合应用在人体内部等极为封闭的狭小环境中,并持续地收集信息。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
磁场
+关注
关注
3文章
540浏览量
24048 -
机器人
+关注
关注
206文章
26965浏览量
201284 -
探头
+关注
关注
0文章
1083浏览量
41134
发布评论请先 登录
相关推荐
珞石机器人近期宣布成功完成了超5亿元的战略+轮融资
继 2022 年战略轮融资后,新一代智能机器人专家「珞石机器人」近期宣布成功完成了超 5 亿元的战略+轮融资。
面向狭窄腔道医疗作业的微型机器人
随着人工智能的发展,医疗手术机器人现如今已走进现实生活,当机器人需要进入体内进行介入治疗时,面向狭窄腔道医疗作业的微型机器人可以从多级狭窄腔道深入诊疗
发表于 01-19 11:47
•166次阅读
LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核
发表于 12-21 20:03
一种结构化道路环境中的视觉导航系统详解
根据结构化道路环境的特点提出了一种将边沿检测和道路环境知识相结合的机器视觉算法 , 并结合基于行为响应的路径规划方法和智能预瞄控制方法 , 实现了一套基本的
发表于 09-25 07:23
ai人工智能机器人
的进行监控管理。
智能电话机器人的另一个优势是不知疲倦,不需要休息和喝水,不需要休息。人在工作时就会有各种各样的脾气,但智能电话机器人不会,永远都以最严谨、最周到的态度和客户进行沟通。
在科技高速发展
发表于 09-21 11:09

【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
采摘耗时长成本大的问题,提出了一种全向移动的草莓采摘机器人系统方案。
系统的硬件电路主要包括以STM32F407ZGT6为核心的主控制器、电源电路、WIFI模块、激光测距单元、电机驱动模块。系统
发表于 08-16 17:35
开发一种用于无创和无线监测系统的自感知AI微型机器人
微型机器人由于其体积小巧、运动灵活以及各种原位治疗的潜力而受到了极大的关注。然而,除了精确的运动控制之外,微型机器人的功能改善对于其与环境的交互变得至关重要。
发表于 08-14 09:49
•214次阅读
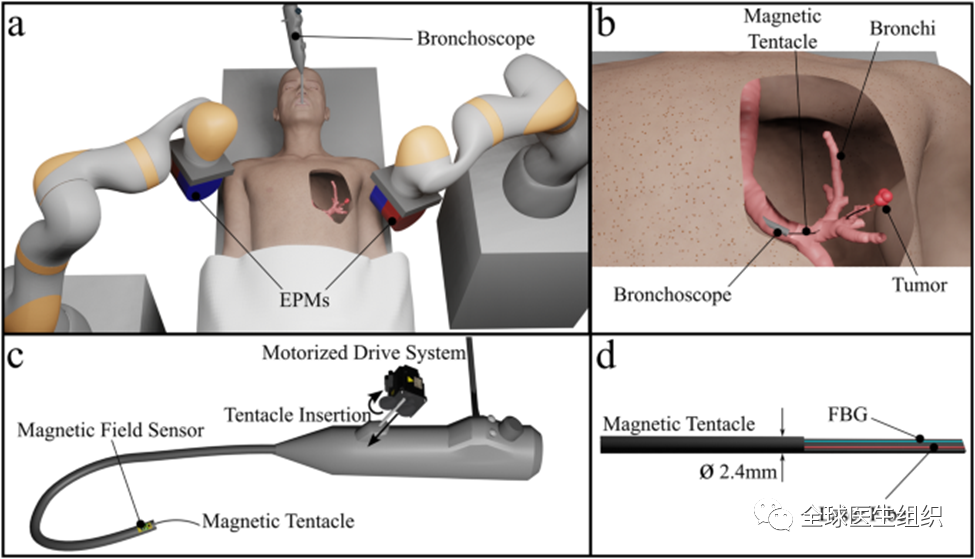
2毫米微型磁控机器人有望改变癌症检测和精准治疗
英国利兹大学研究人员成功研发出一款仅有2毫米直径的微型磁控机器人(如下图),能够深入到肺部进行癌症检测和精准治疗。
发表于 08-02 09:49
•492次阅读

装配的学问和机器人工序的联系
举个例子来说,里面有弹簧的,很不好装,必须有几个舌头压着。如果你没装过,那肯定机器人也装不出来。所以,有基层打工经验也是一种很好的知识,尽管老板不要求,但阅历决定了成功的难度。
比如我,程序写得可能
发表于 06-09 12:55
如何快速地让机器人投入生产
不能完成的技巧性的工作。
所以机器人是一种模拟人手的技巧性设备。它的主要内容就是。
绕
转
穿
钳
拿
放
给
总之,它的主要内容就是研究人手的基本动作。
而研究人手的动作的主要内容就
发表于 06-06 16:18
基于宽度神经网络的微型仿鱼机器人运动控制方法
研究团队设计了以宽度神经网络为主体的微型机器人基本运动控制器;基于李雅普诺夫稳定理论,推导了保障机器人运动稳定的控制器网络参数约束,简化了不同运动基元的控制器参数训练学习过程。
发表于 05-30 10:21
•170次阅读

浅谈儿童陪护机器人
儿童陪护机器人越来越受到人们的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被广泛应用于儿童陪护机器人中的转动控制。本文将从步进电机芯片的工作原理、优势和
发表于 05-11 15:12





 工商网监
工商网监
评论