 两足机器人DIY图解
两足机器人DIY图解
步骤1:组装Servo
第一步是购买一些伺服电机和一个伺服支架套件。我从Hobbyking那里获得了舵机,而支架套件则来自ebay。
需要12个Servos。我使用了Hextronik HX5010标准伺服器。
第2步:构建一条或两条腿
接下来按照您想要的方式构建机器人搭配套件中的不同零件。我用两条腿建造了机器人。每条腿有6个伺服电机。找到合适的机器人布局可能需要反复试验。确保每个腿都有所需的运动范围。
步骤3:清理接线
捆扎在一起,并将导线布线到顶部,在该处我们将连接控制板。使用的控制板是智能伺服控制器。确保电线有足够的松弛度,以使伺服电机自由移动。
步骤4:连接!
连接伺服器到达输出通道,无线电接收器到达输入通道。记下哪个伺服器连接到哪个通道。设置控制板时,这将使您的生活变得更轻松。
所使用的无线电接收机是6通道HK-T6A V2。对于此机器人,我仅使用通道1-5
第5步:IO配置
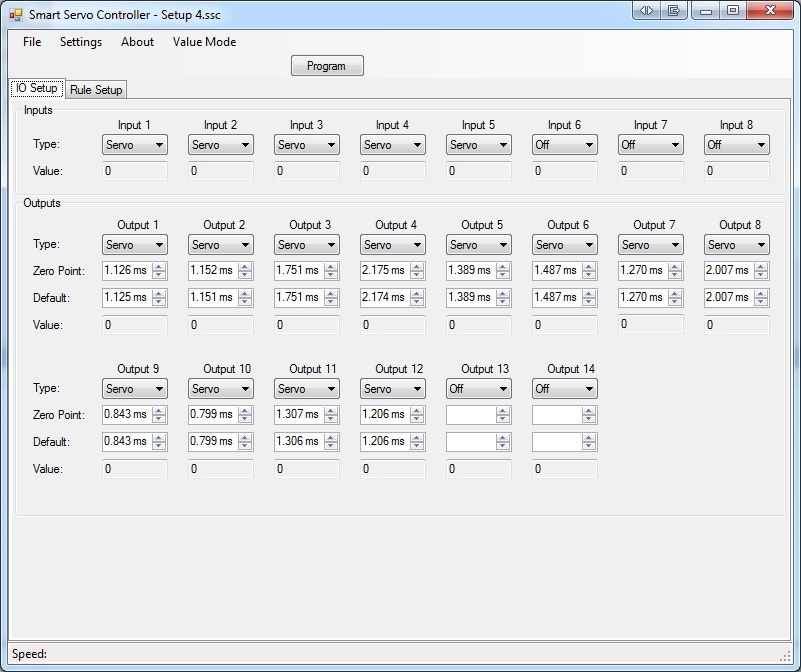
下一步,我们需要设置具有正确输入和输出通道的软件。输入类型为Servo,因为我们使用的是RC接收器。输出通道也是Servo类型。
使用“值选择器”设置默认的伺服位置。调整每个伺服器的位置,使机器人处于中立的姿势。
步骤6:值选择器

要使用“值选择器”,请按住CTRL键并单击一个数值框。如果单击输出通道,则滑块将变为活动状态。当您上下滑动滑块时,伺服将移动到该位置。
如果您单击的框是其中一个输入,则需要移动实际的输入设备。对于操纵杆,意味着推动操纵杆。这样做时,值将在屏幕上更改。
选择完值后,按ESC键保存该值。
步骤7:创建规则
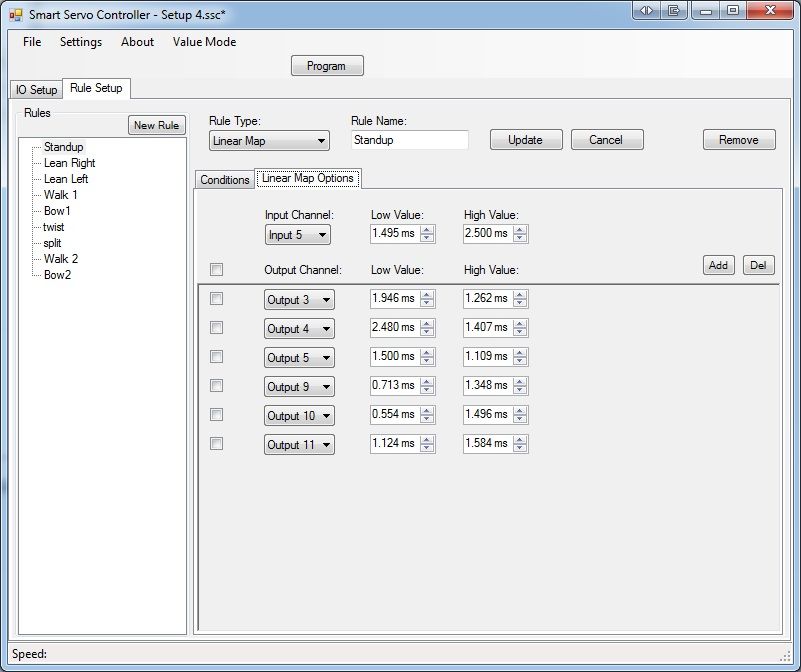
接下来,我们创建一系列规则,将输入通道映射到我们希望机器人行走的不同功能。我创建了9条规则,如下所示。 “站立”规则使机器人从蹲伏位置转到站立位置。为此,可以通过以下方法创建线性映射规则:
选择输入通道。使用值选择器并将操纵杆轴移动到想要的坐姿位置,将输入通道设置为较低的值。 。
移动实际的操纵杆,该值将显示在屏幕上。
使用值选择器将输入通道的高值设置为机器人希望操纵杆轴所在的位置
为腿中的每个伺服器设置较低的值以使机器人蹲下。
为腿中的每个伺服器设置较高的值以使机器人站立。/li》
现在,当您将操纵杆轴从下蹲位置调整到站立位置时,舵机将适当移动。
步骤8:重复
针对您要执行的每组运动,对无线电控制器上的每个轴重复上一步。您可以同时运行多个规则,并且输出将添加到一起。
该视频提供了如何将输入映射到两个输出通道的示例。
第9步:玩得开心
完成后,请按程序按钮。现在该玩游戏了,看看如何使机器人行走!
-
机器人
+关注
关注
206文章
26974浏览量
201296
发布评论请先 登录
相关推荐
DIY推荐!自制一个基于ESP32的沙画机器人

【开源项目】Emo:基于树莓派 4B DIY 能笑会动的桌面机器人
开源作品!稚晖君超迷你低成本开发板、超酷机器人、智能手环等参考方案
四足机器人DIY源代码






 工商网监
工商网监
评论