 通用放大器搞定扫地机器面临的6大设计挑战
通用放大器搞定扫地机器面临的6大设计挑战
忙碌一周后,家庭清洁工作是人们最不愿做的事情之一。迄今为止,扫地机器人已面世约23年了,随着其智能和自动化程度日益提高,人们可以在其工作时专注于自己的事情。
如今的扫地机器人上集成了非常多的功能,比如新的拖地功能和自动除尘等。但对设计人员来说,这也意味着在设计可靠的系统时将会面临更多的挑战。而小型放大器可以帮助其快速克服许多重大挑战。下文列举了设计人员在设计过程中会遇到的六种挑战,以及小型放大器能提供的六种解决方案:
设计挑战1
扫地机器人车轮的力量决定了它的越障能力。为了能够通过厚地毯和越过门槛,其电机功率需要达到至少30W或更高。如果发生失速或过载事件,例如车轮被电线卡住,电机绕组电流将立即上升。延迟检测到这种情况会导致电机过热并缩短其寿命。
解决方案1
电机控制系统中的快速瞬态响应电流感应
为减少过热的可能性,可以使用低侧电流感应电路来监控电机的电流;见图1。

图1:电机控制系统中的电流感应电路
在该应用中用作运算放大器(op amps)电机控制系统中的电流感测电路的关键参数是压摆率。例如,当发生失速事件时,绕组电流会从0.5 A上升到3.5 A,运算放大器的相应输出为0.5 V至3.5 V(50mΩ分流电阻和20-V/V增益)。使用压摆率为0.5 V/μs的运算放大器时,阶跃变化的安定时间约为6μs,而使用TI的TLV905x等压摆率为15 V/μs的运算放大器,相同阶跃变化的安定时间仅为0.2μs。因此,使用瞬态响应速度提高30倍的TLV905x将增加控制器执行过流保护的余量。
设计挑战2
由于充电电压不准确,导致电池续航时间缩短
扩大电池容量是扫地机器人面临的一大重要设计挑战。消费者期望机器人在需要再次充电前,能够完成一个完整的清洁周期。
使用低质量电流感测的高输出电压纹波将产生无法使用的电池容量。例如,如果4.2 V时的电池精度为±3.5%,经过250次充电循环后会将可用电池容量降低至40%,而如果4.2 V时的电池精度为±0.5,则会使可用电池容量保持在85%。
解决方案2
恒流/恒压回路中的高精度电压/电流感应
对电池充电的一种常见方法是使用如图2所示的分立充电解决方案。电压和电流感应电路在控制回路中产生反馈电压和电流信号。为了实现高精度和稳定性,偏移电压和温度漂移是此处所用运算放大器的两大关键参数。

图2:分立电池充电器电路
设计挑战3
由于负温度系数(NTC)热敏电阻错误,导致电池过热
监控电池组的温度是扫地机器人的一大主要安全问题。与温度传感器的解决方案相比,监控电池组温度的具有成本效益的方法是使用NTC热敏电阻感测电路。温度感测不准可能导致电池组过热或烧坏。
解决方案3
使用NTC进行高精度温度测量
测量温度的一种方法是使用电阻和热敏电阻来分配电源,并将分压器输出直接连接到系统控制器内部的模数转换器(ADC)引脚。分压器的输出阻抗很低,输出电压范围对ADC来说并不理想,因此这种方式效率不高,且测量结果不准确。
图3使用运算放大器作为调节温度输出信号的缓冲器,为分压器和低阻抗节点提供高阻抗节点以驱动ADC,并将输出范围调节至最佳ADC分辨率。运算放大器的影响参数包括直流精度(偏移电压、电压漂移)和稳定性。
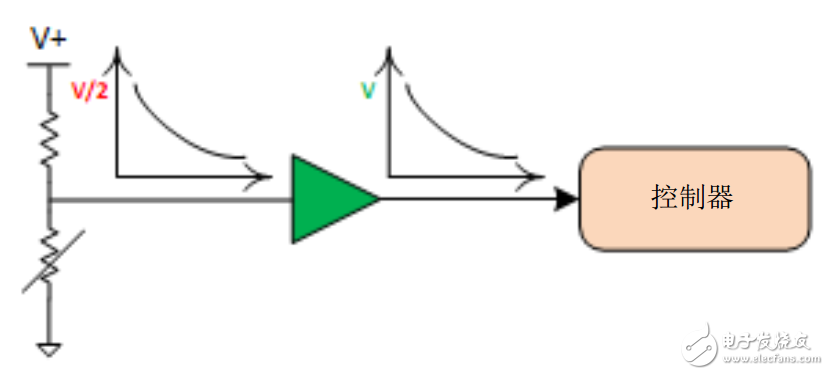
图3:NIC热敏电阻感测电路
设计挑战4
由于里程计测量不准,导致定位和导航系统精度较低
当扫地机器人构建环境地图时,里程计应提供用于绘图的准确行进距离。里程计测量不准将导致机器人的定位和导航精度较低。
解决方案4
可用稳健的里程计信号增强电路
测量里程的常用方法是使用光电解码器或霍尔效应传感器并对脉冲进行计数,以获得里程信息。通常来讲,里程计安装在车轮内部,因此印刷电路板走线很长,更容易受到开关噪声的影响,从而导致输出信号在MCU的输入端口失真。如图4所示的缓冲电路可产生无抖动和失灵的标准逻辑信号。

图4:用于稳健逻辑输出电路的缓冲器
设计挑战5
嘈杂/失真的电机驱动信号会导致电机意外运行
系统控制器通常位于控制板的中心,而电机安装在电路板的边缘。因此,直接连接到MCU端口的驱动信号更容易产生噪声或失真,导致电机意外运行。
解决方案5
电机驱动路径中的脉宽调制(PWM)增强器电路
此处的解决方案是加装一个用作增强器的运算放大器,而不是将驱动信号与MCU引脚连接的电路。图5所示为用于有刷直流电机的分立电机驱动解决方案。控制器通过图腾柱场效应晶体管驱动器产生PWM信号,以驱动H桥功率晶体管。PWM增强器电路有助于最大限度地减少延迟并增强PWM信号,同时降低噪声和失真。
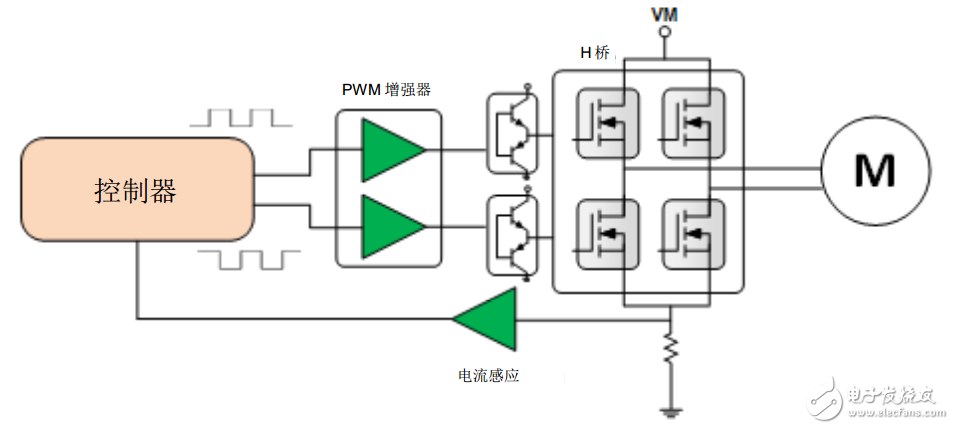
图5:增强型PWM电路
设计挑战6
由于扫地机器人距离检测出错,导致碰撞或跌落事故
防跌落传感器用于检测楼梯的高度,而碰撞传感器用于检测扫地机器人周围的障碍物。距离检测出错时,会导致传感器性能不准,从而发生碰撞或跌落事件,并导致机器人损坏。
解决方案6
高精度红外输出信号调节
如图6所示,红外LED和光电晶体管被广泛用作检测距离的低成本解决方案。距离信息与固定频率调制波所携带回波的幅度相关。
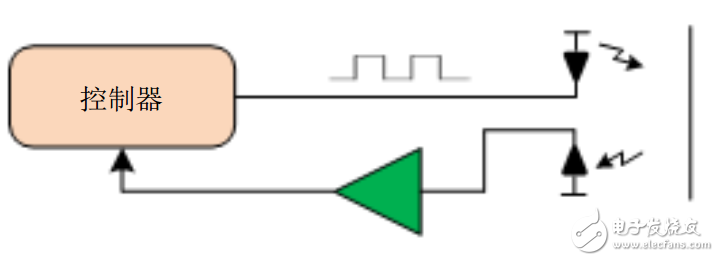
图6:红外LED接收器的信号调节电路
具有低输入偏置电流的互阻抗运算放大器电路在此处被广泛使用。参考电路如SBOA268A所示。
-
放大器
+关注
关注
142文章
12398浏览量
209844 -
米家扫地机器人
+关注
关注
1文章
4浏览量
5224
发布评论请先 登录
相关推荐
面临扫地机器人设计挑战,这六种情况用小型放大器搞定






 工商网监
工商网监
评论