 路径跟随机器人越野车的制作
路径跟随机器人越野车的制作
步骤1:组装材料

图片中显示的某些材料用于制作刮的。但是,本教程将不介绍有关如何为越野车制造底盘或模型或如何将电线焊接至电动机的过程。如果您愿意,这里是您需要的所有材料:
Raspberry Pi 3
电机控制板
面包板
一个T型补鞋匠+
2个12V直流电动机
2个轮子
1个AA电池座(用于4个AA电池)
4节AA电池
跳线
USB电池组
螺丝起子
焊接铁和焊料
剥线钳
小纸板或塑料盒和胶水/胶带
2条线传感器
8条母对母跳线
4条公对公跳线
绝缘带
步骤2:组装电动机板
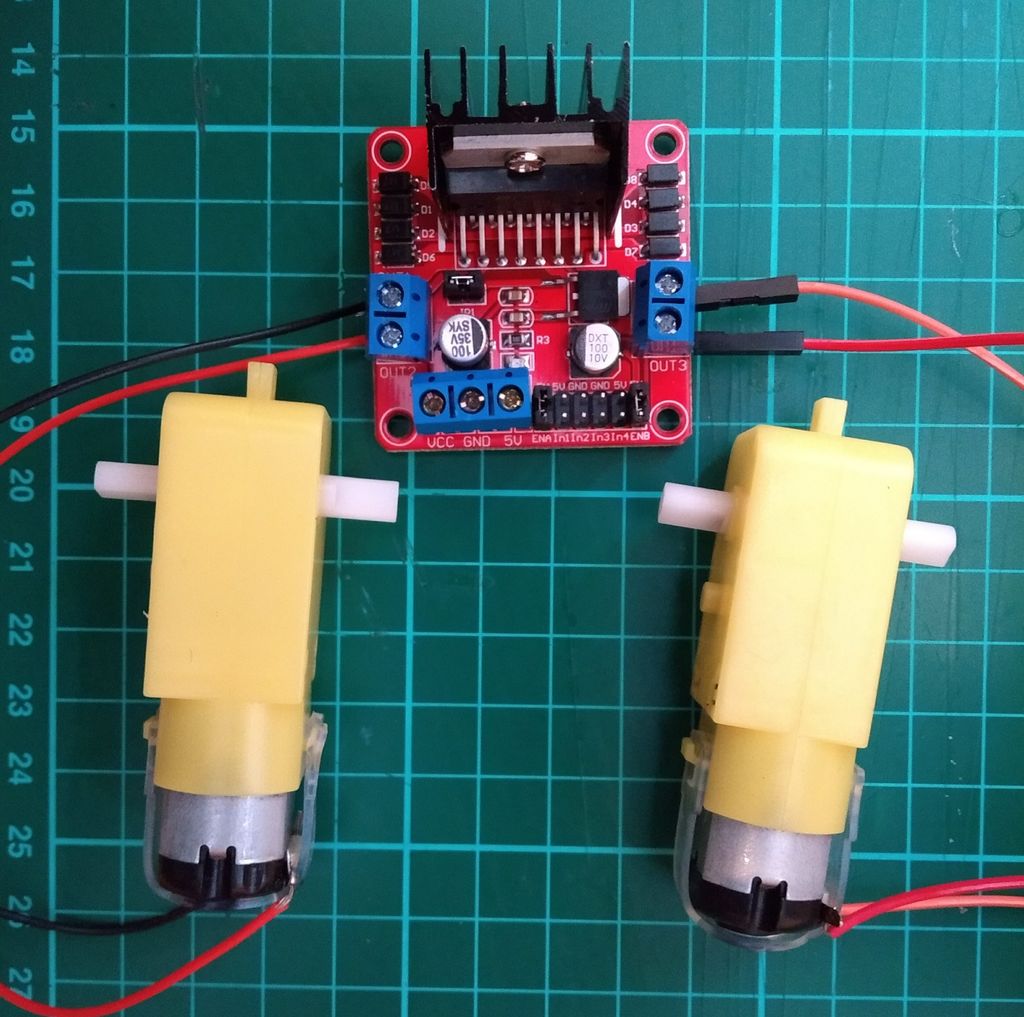
假设已设置电动机,则需要将电动机连接到H桥板上。为此,您将需要一把小螺丝刀。现在,您需要将电动机连接到板上。为此,您将需要一个小的螺丝刀
使用螺丝刀,松开端子排中的螺钉。将剥皮的电线末端插入接线盒。
步骤3:为电动机供电
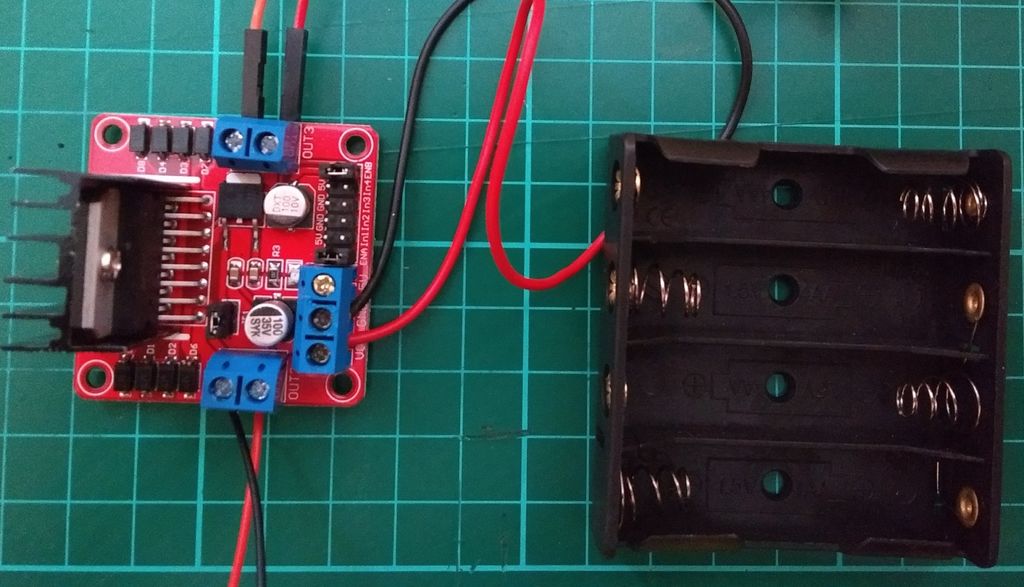
电动机需要的功率超过Rpi可以提供的功率。因此,您必须使用4节AA电池为它们供电。
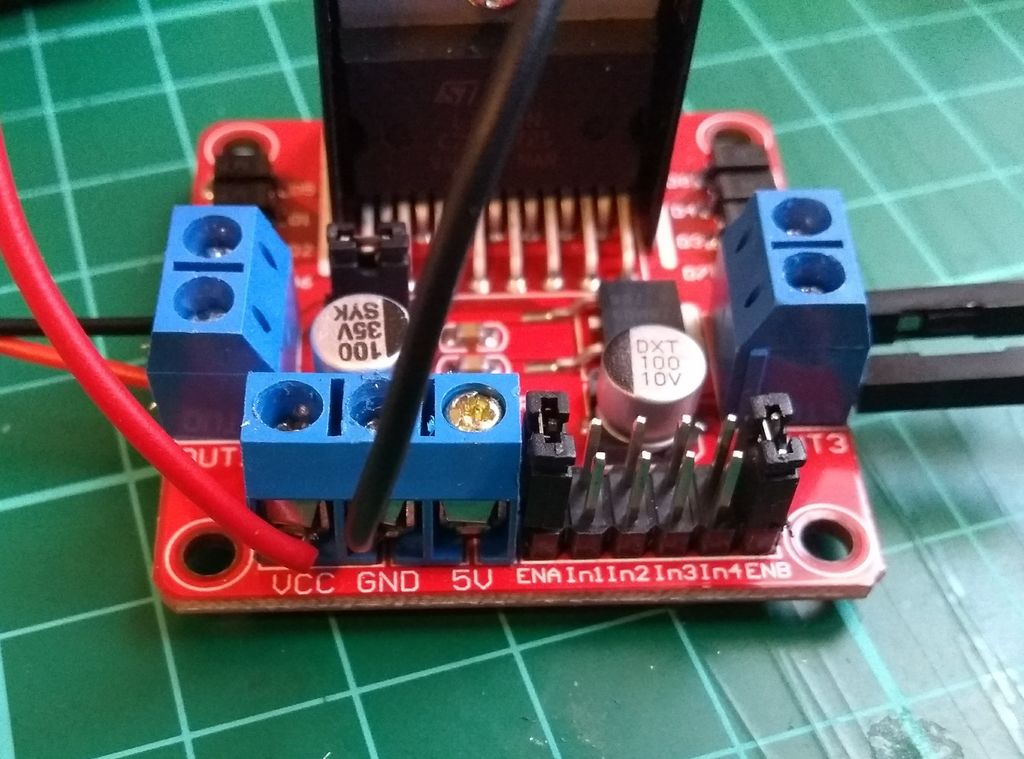
松开标有 VCC,GND 和 5V 的接线盒中的螺钉。拿起AA电池座,然后将红色导线插入 VCC 接线盒中。黑线进入 GND 块。
拧紧螺钉,使电线牢固地固定到位。
步骤4:将电动机连接至Rpi
该项目中使用的板需要连接到Raspberry Pi。其他板可能会以不同的方式连接,某些板可以简单地作为HAT放置在Raspberry Pi GPIO引脚上。
此处使用的板上还有标记为In1,In2,In3和In4的引脚。作为两个GND引脚。您可以使用Pi上的哪个GPIO引脚来决定;在该项目中,使用了GPIO 7、8、9和10。如果您的电路板没有GND引脚,则可以使用Rpi中的GND引脚获得相同的结果。如果需要执行此操作,请将GND线插入与电池组中黑色线相同的端子排中。
使用T型补鞋匠+连接面包板和Rpi。
使用五根公对公跳线连接到面包板。
In1-》 GPIO 7
In2-》 GPIO 8
In3-》 GPIO 9
In4-》 GPIO 10
步骤5:准备连接器
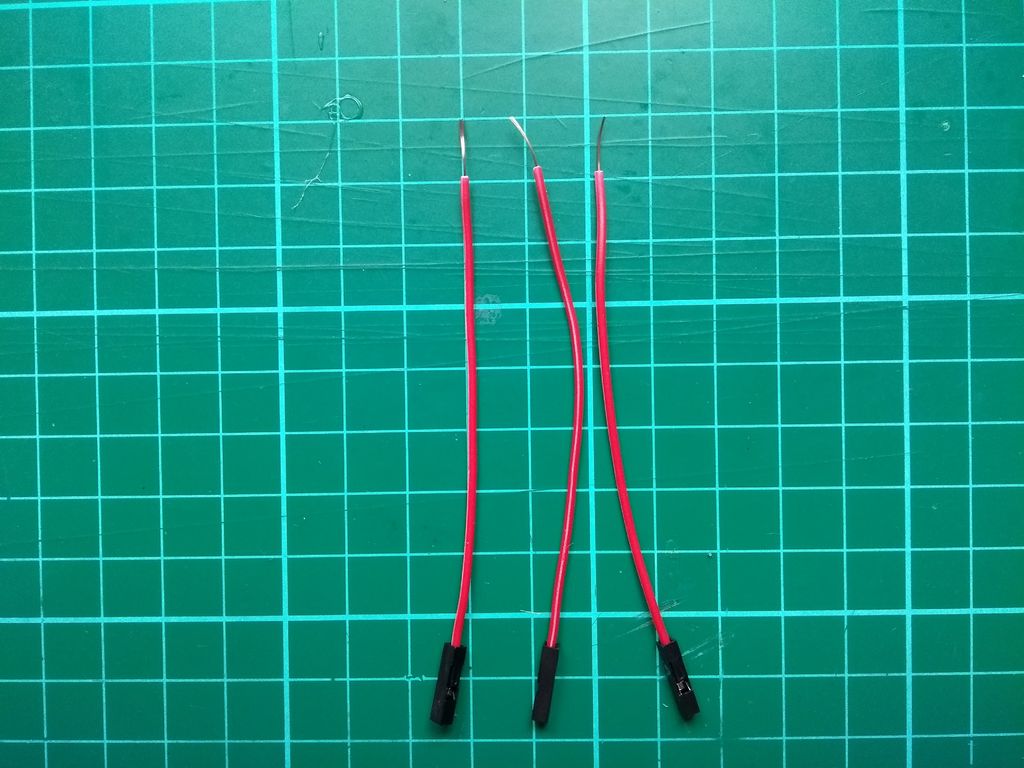
您的第一步将是将线传感器连接到越野车。通常,本教程中使用的线传感器类型需要连接到3V3引脚,但是您将通过同一电源引脚运行两个传感器,因此将它们都连接到5V引脚。
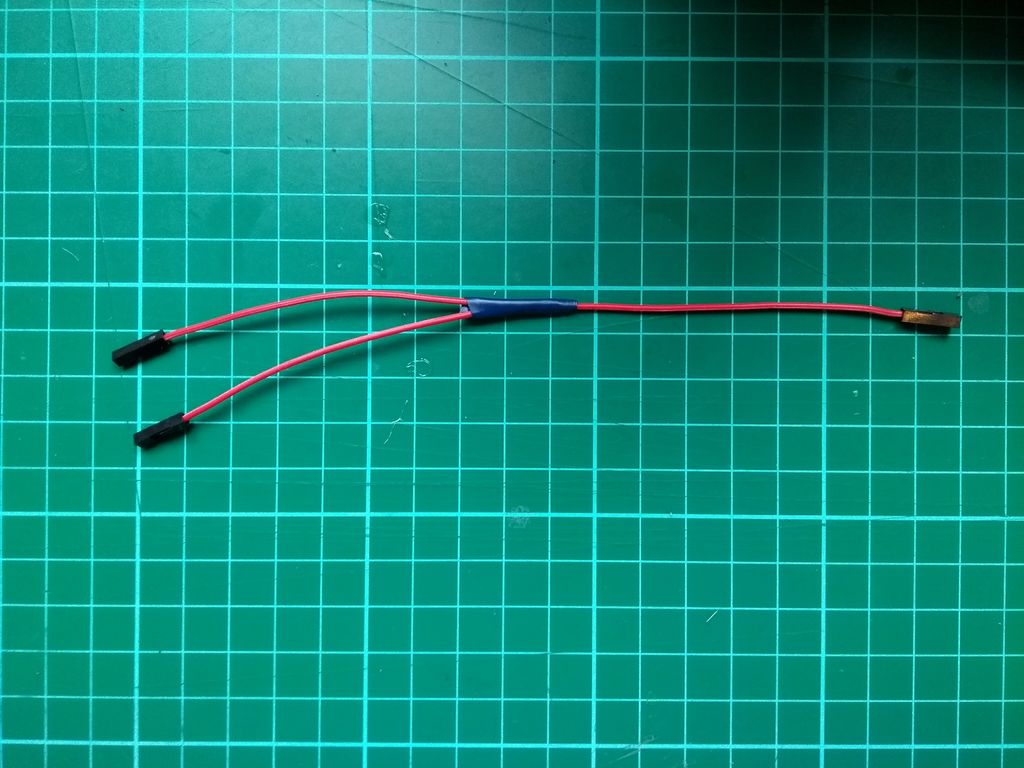
取三根母对母跳线,从两端拔下连接器,然后剥去塑料护套,露出下面一厘米左右的多芯电线。抓住三根跳线,将其多芯线绞在一起。然后使用烙铁将引线键合。用少量绝缘胶带覆盖引线的连接。
用另外三根母对母跳线重复整个过程。
步骤6:连接线路传感器
每个线路传感器都有三个引脚: VCC 用于供电, GND 接地,DO进行数字输出。
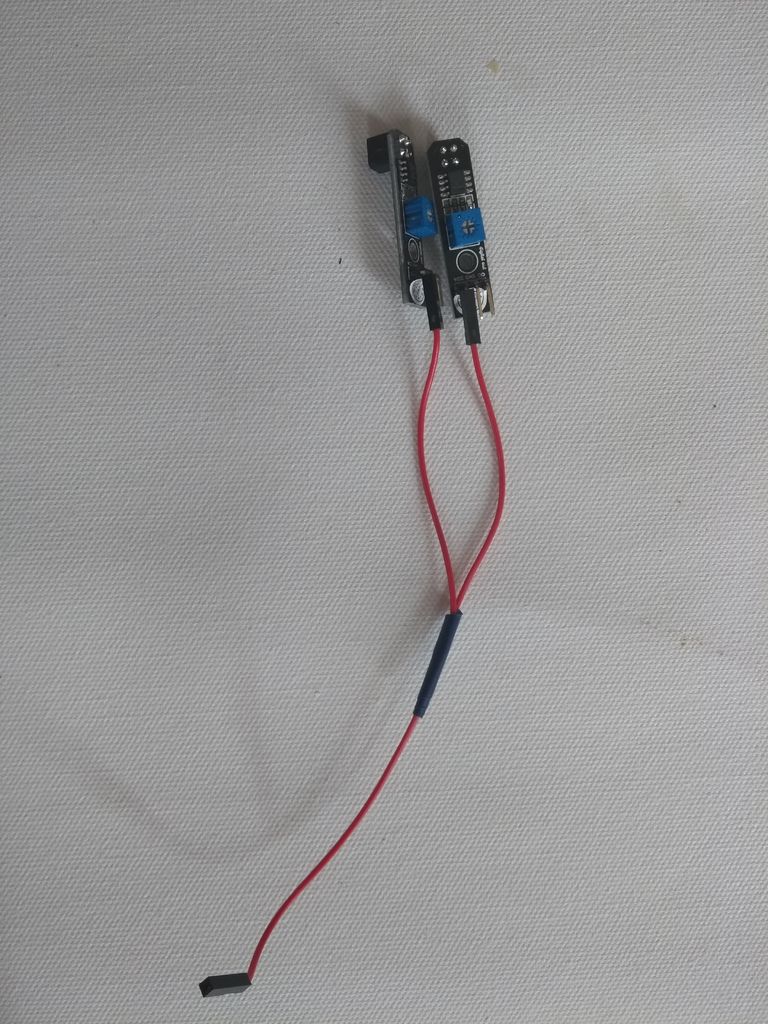
将一根焊接在一起的三线跨接线引出一根,并将其两端连接到 VCC 分别位于两个传感器的引脚上。
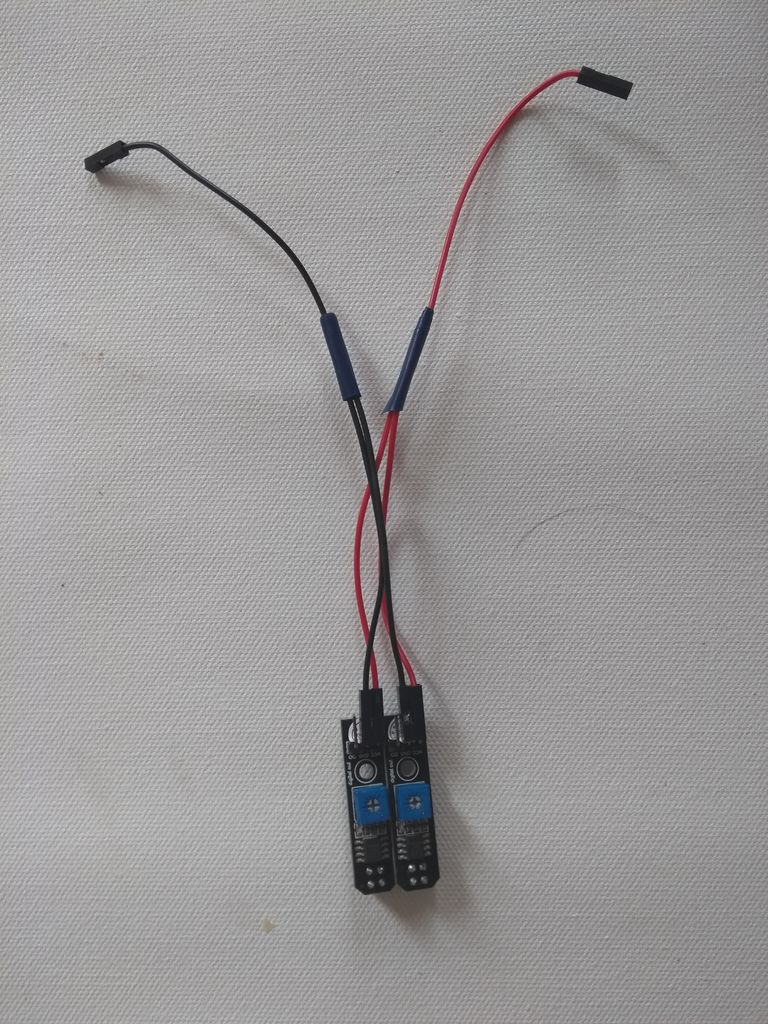
拿第二根焊接的跨接引线,并将两端连接到每个线传感器的 GND 引脚上。
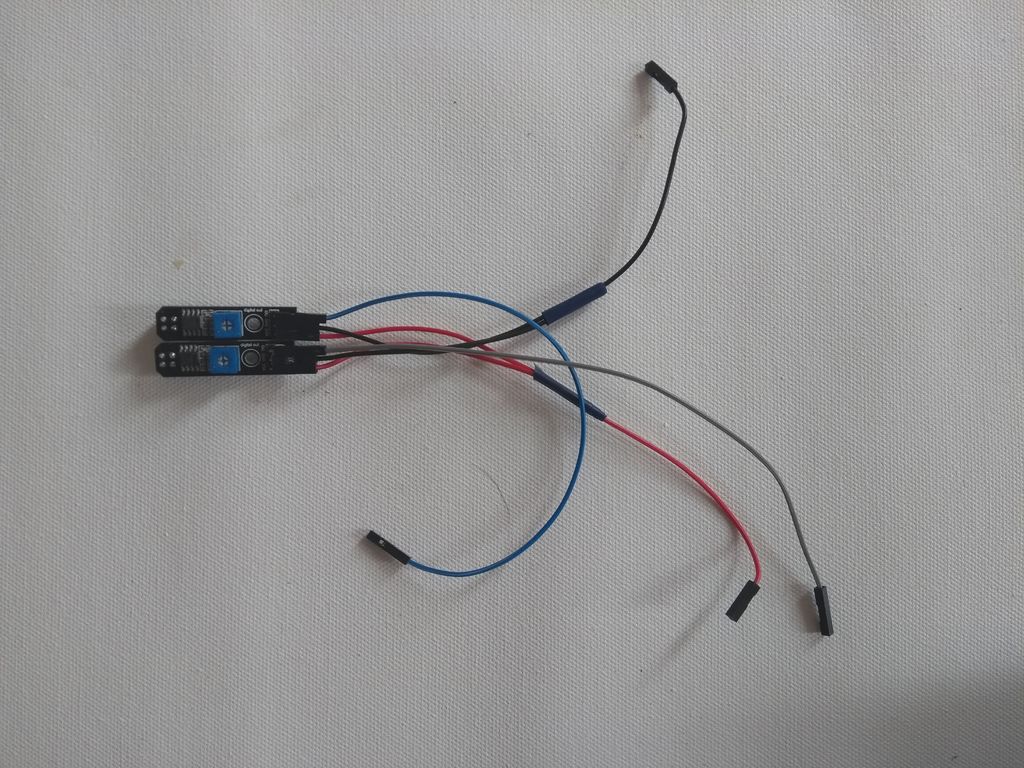
接剩下的两根单跳线,并将每根跳线连接到每个线传感器上的 DO 引脚。
现在连接 VCC 引脚将两个线感测器连接到Raspberry Pi上的 5V 引脚,并将传感器的 GND 引脚连接到Raspberry Pi上的 GND 引脚。两个 DO 引脚中的每一个都可以连接到任何编号的GPIO引脚。在此示例中,使用了 GPIO 17 和 GPIO 27 引脚。
步骤7:测试线路传感器
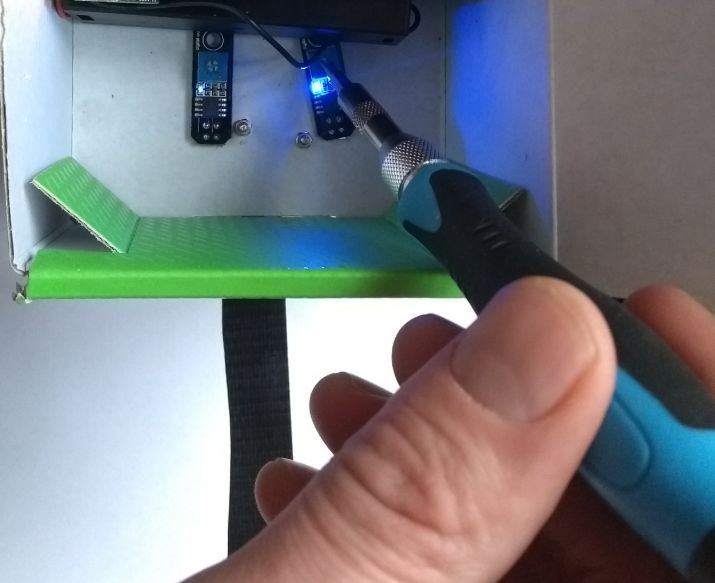
这是一个非常简单的步骤。您的线传感器上有一个LED,当通电时,该LED保持点亮。但是,一旦将其暴露在黑线中,它们就会消失。线传感器应该是这种情况。
如果您认为它太灵敏,请使用螺丝刀并通过其电位计对其进行调整。
第8步:将程序插入Python
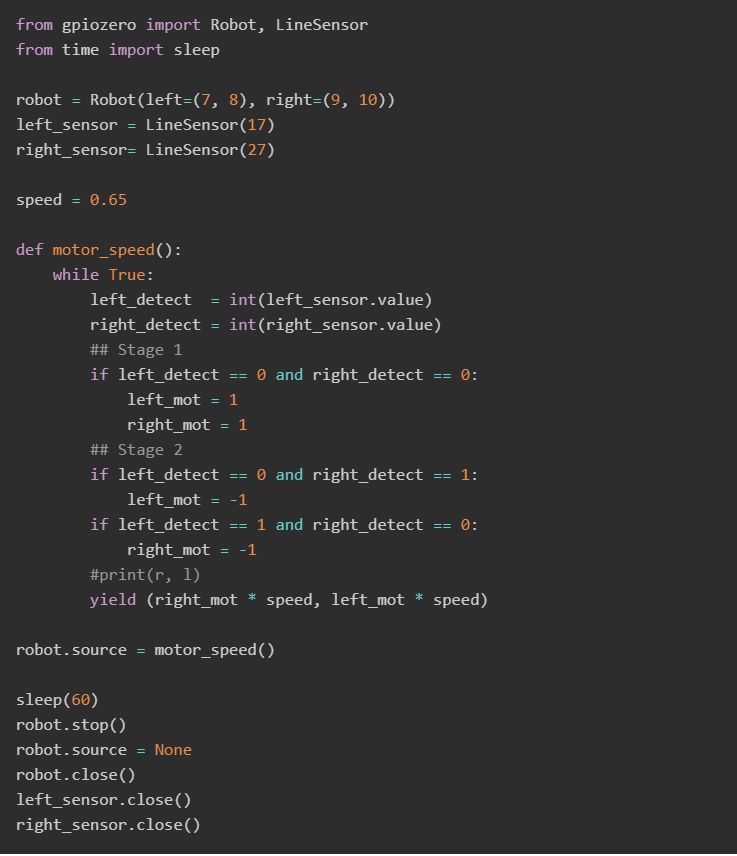
插入这些代码行并运行它,您应该拥有一个可以在轨道上完美运行的机器人。
-
机器人
+关注
关注
206文章
27025浏览量
201377 -
电机控制板
+关注
关注
0文章
5浏览量
6865
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论