 泳池深度计DIY图解
泳池深度计DIY图解
步骤1:设备背后的理论
我们生活在空气的海底。这里的压力约为1020hPa(百帕斯卡),因为空气柱在此形成的空间重量约为每平方厘米1千克。
水的密度要高得多,因为1升空气重约1.2克,1升水1千克,即约800倍。因此,当每8米高度的气压下降约1hPa时,水面下每厘米的压力增益为1hPa。在约10米的深度,压力为2000hPa,或两个大气压。
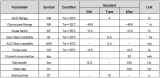
此处使用的压力传感器的测量范围介于750和1500 hPa之间,分辨率约为1 hPa。这意味着我们可以在大约1厘米的分辨率下测量高达5米的深度。
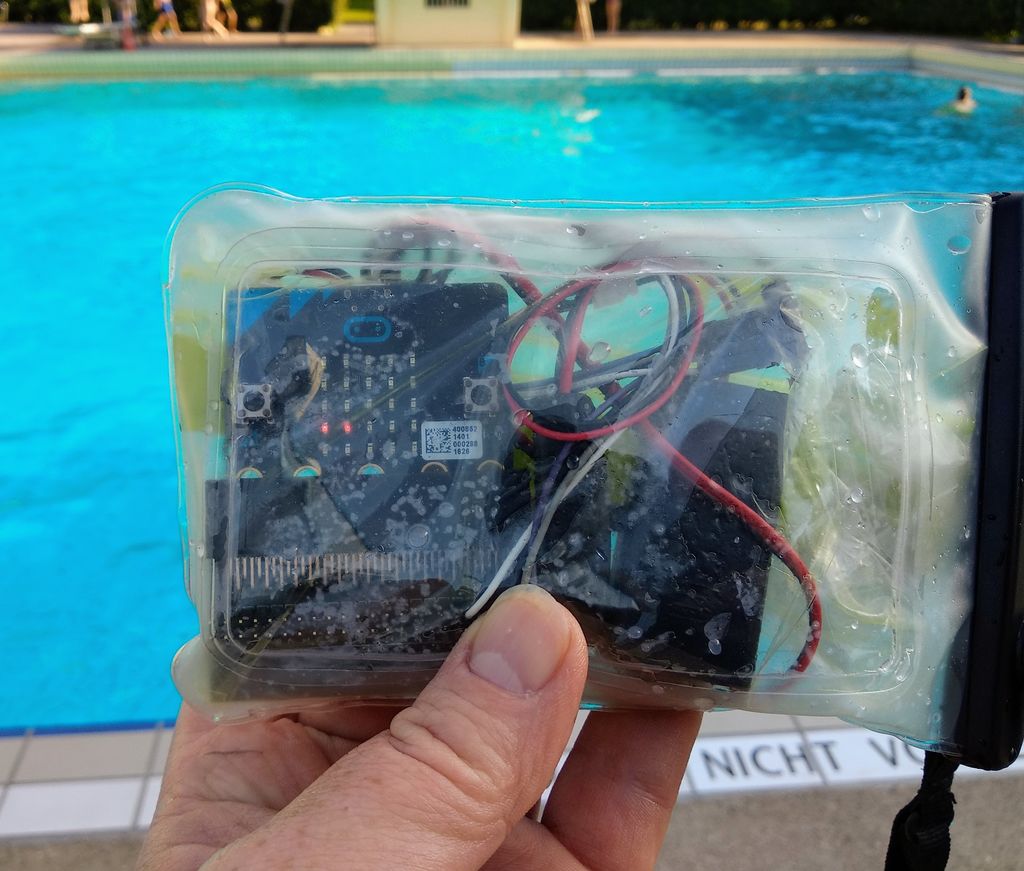
该设备将是Boyle Marriotte型深度计。它的组装非常简单,将在后面的步骤中介绍。传感器使用I2C协议,因此micro:bit的边缘连接器非常方便。最关键的部分是防水袋,因为任何湿度都会损坏微型钻头,传感器或电池。由于一些空气将被困在袋内,增加重量有助于补偿浮力。
步骤2:使用设备





脚本,详细信息如图所示在后面的步骤中,是我之前为压力计开发的脚本的变体。要测试设备,您可以使用那里描述的简单压力室。
对于潜水目的,它显示以压力测量计算的深度,以20 cm步长的条形图或根据要求以数字显示。
使用微型按钮A :位,您将当前压力设置为参考压力值。要确认输入,矩阵会闪烁一次。
您可以使用它来查看潜水的深度,或记录您潜水的深度。
在第一种情况下,将当前的外部气压设置为参考。在第二种情况下,将压力设置在最深处,作为压力参考,然后可以显示当您回到地面时的深度。
按钮B显示根据压差计算的深度,以米为单位的数值。
第3步:所需材料
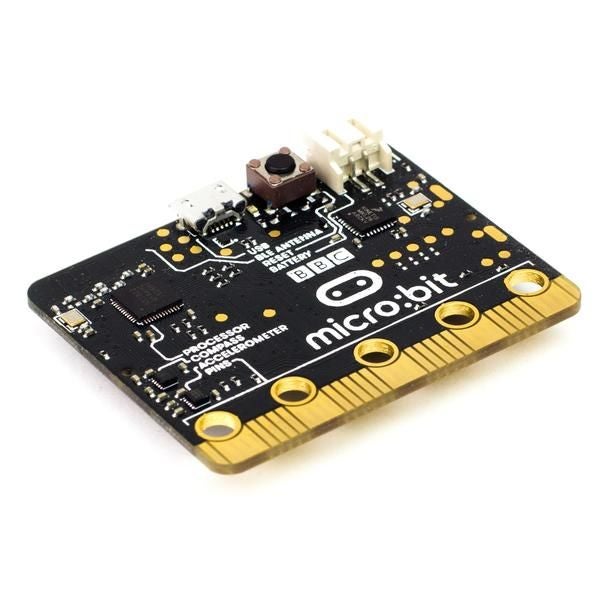


微观:位。例如。 Pimoroni UK/DE以13英镑/16欧元计算。
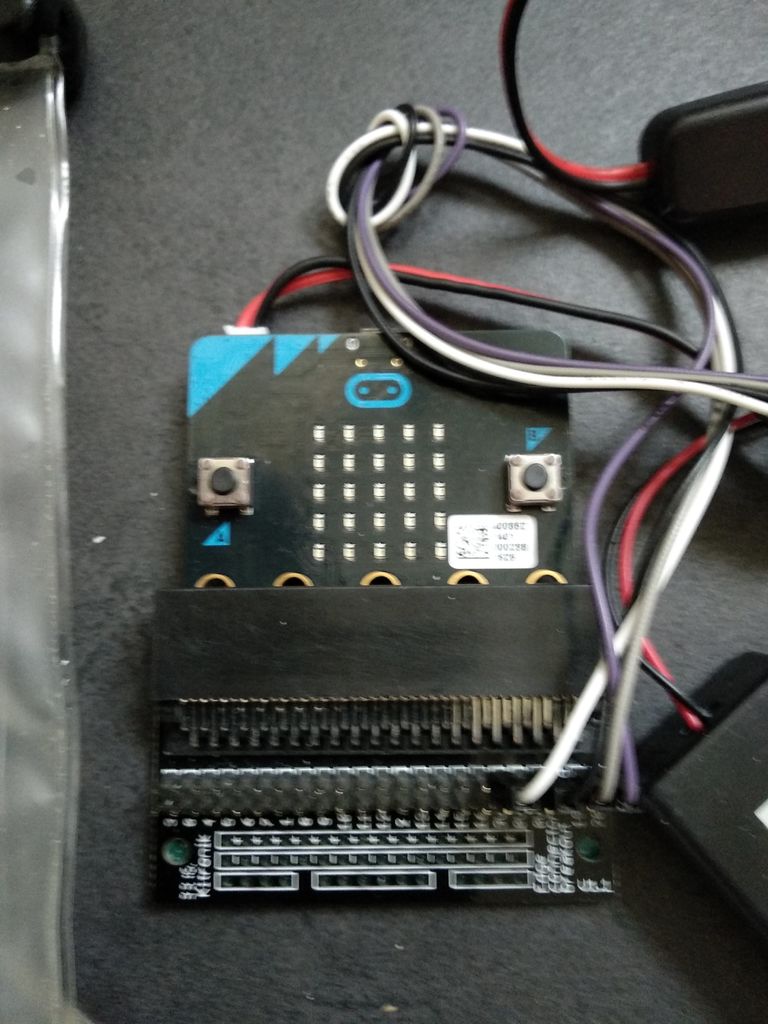
边缘连接器(Kitronic或Pimoroni),5英镑。我使用了Kitronic版本。
BMP/BME280传感器。我使用Banggood的BMP280传感器,三个单元4.33欧元。
连接传感器和边缘连接器的跳线。
上面边缘连接器/传感器组合的一个很好的替代品可能是Pimoroni enviro:bit(现在未经测试,请参见最后一步)。
用于micro:bit的电池组或LiPo。
带开关的电源线(可选但有帮助) )。
明确的防水袋。我使用硅胶袋作为手机和一个或两个小拉链袋。
确保材料足够厚,因此边缘连接器上的针脚不会损坏袋子。
一些重量。我使用了用于钓鱼的铅块。
Arduino IDE和几个库。
第4步:汇编



安装Arduino IDE和所需的库。详细信息在此处描述。
(MakeCode脚本不需要。)
给定使用Kitronik边缘连接器,将引脚连接到I2C端口19和20.
这不是必需的用于Pimoroni边缘连接器。
将传感器的接头焊接到传感器上,并使用跨接电缆连接传感器和边缘连接器。
将VCC连接到3V,GND连接到0 V,SCL连接到端口19,SDA连接到端口20.
或者将电缆直接焊接到分支。
通过USB电缆将micro:bit连接到我们的计算机。
打开提供的脚本并将其闪存到micro:bit。
使用串行监视器或绘图仪,检查传感器是否提供合理的数据。
从计算机上断开micro:位。
将电池或LiPo连接到micro:位。
按下按钮B,读取值
按下按钮A.
按下按钮B,读取数值。
将设备放在两层密封袋中,袋中只留下很少的空气。
如果放置重物以补偿浮力。
检查一切是否都是水密的。
前往游泳池玩游戏。
第5步:MicroPython脚本
脚本只需从中获取压力值传感器,将其与参考值进行比较,然后根据差值计算深度。为了将值显示为条形图,采用深度值的整数和余数部分。第一个确定线的高度。其余部分分成五个箱子,它们确定了栏杆的长度。顶层为0 - 1 m,最低4 - 5 m。
如前所述,按下按钮A设置参考压力,按钮B显示“相对深度”,以米为单位,显示为数值。到目前为止,负值和正值以相同的方式显示在LED矩阵上的条形图。
您可以根据需要随意优化脚本。您可以取消静音某些行以在Arduino IDE的串行监视器或绘图仪上显示值。要模拟该功能,您可以构建我在之前的instructable中描述的设备。
我没有写过读取传感器的脚本部分。我不确定来源,但我要感谢autors。欢迎任何更正或优化提示。
#include
#include
Adafruit_Microbit_Matrix microbit;
#define BME280_ADDRESS 0x76
unsigned long int hum_raw,temp_raw,pres_raw;
signed long int t_fine;
uint16_t dig_T1;
int16_t dig_T2;
int16_t dig_T3;
uint16_t dig_P1;
int16_t dig_P2;
int16_t dig_P3;
int16_t dig_P4;
int16_t dig_P5;
int16_t dig_P6;
int16_t dig_P7;
int16_t dig_P8;
int16_t dig_P9;
int8_t dig_H1;
int16_t dig_H2;
int8_t dig_H3;
int16_t dig_H4;
int16_t dig_H5;
int8_t dig_H6;
double press_norm = 1015; // a starting value
double depth; // calculated depth
//--------------------------------------------------------------------------------------------------------------------
void setup()
{
uint8_t osrs_t = 1; //Temperature oversampling x 1
uint8_t osrs_p = 1; //Pressure oversampling x 1
uint8_t osrs_h = 1; //Humidity oversampling x 1
uint8_t mode = 3; //Normal mode
uint8_t t_sb = 5; //Tstandby 1000ms
uint8_t filter = 0; //Filter off
uint8_t spi3w_en = 0; //3-wire SPI Disable
uint8_t ctrl_meas_reg = (osrs_t 《《 5) | (osrs_p 《《 2) | mode;
uint8_t config_reg = (t_sb 《《 5) | (filter 《《 2) | spi3w_en;
uint8_t ctrl_hum_reg = osrs_h;
pinMode(PIN_BUTTON_A, INPUT);
pinMode(PIN_BUTTON_B, INPUT);
Serial.begin(9600); // set serial port speed
Serial.print(“Pressure [hPa] ”); // header for serial output
Wire.begin();
writeReg(0xF2,ctrl_hum_reg);
writeReg(0xF4,ctrl_meas_reg);
writeReg(0xF5,config_reg);
readTrim(); //
microbit.begin();
// microbit.print(“x”);
delay (1000);
}
//---------------------------------------------------------------------------------------------
void loop()
{
double temp_act = 0.0, press_act = 0.0, hum_act=0.0;
signed long int temp_cal;
unsigned long int press_cal, hum_cal;
int N;
int M;
double press_delta; // relative pressure
int depth_m; // depth in meters, integer part
double depth_cm; // remainder in cm
readData();
// temp_cal = calibration_T(temp_raw);
press_cal = calibration_P(pres_raw);
// hum_cal = calibration_H(hum_raw);
// temp_act = (double)temp_cal / 100.0;
press_act = (double)press_cal / 100.0;
// hum_act = (double)hum_cal / 1024.0;
microbit.clear(); //reset LED matrix
// Button A sets actual value as reference (P zero)
// Button B display current value as depth in meters (calculated from pressure difference)
if (! digitalRead(PIN_BUTTON_A)) {
// set normal air pressure as zero
press_norm = press_act;
// microbit.print(“P0: ”);
// microbit.print(press_norm,0);
// microbit.print(“ hPa”);
microbit.fillScreen(LED_ON); // blink once to confirm
delay (100);
}else if (! digitalRead(PIN_BUTTON_B)) {
// display depth in meters
microbit.print(depth,2);
microbit.print(“m”);
// Serial.println(“”);
}else{
// calculate depth from pressure difference
press_delta = (press_act - press_norm); // calculate relative pressure
depth = (press_delta/100); // depth in meters
depth_m = int(abs(depth)); // depth im meters
depth_cm = (abs(depth) - depth_m); // remainder
/* // used for development
Serial.println(depth);
Serial.println(depth_m );
Serial.println(depth_cm);
*/
// Steps for bargraph
if (depth_cm 》 0.8){ // set length of bars
(N=4);
} else if (depth_cm 》 0.6){
(N=3);
} else if (depth_cm 》 0.4){
(N=2);
} else if (depth_cm 》 0.2){
(N=1);
} else {
(N=0);
} if (depth_m == 4){ // set level == meter
(M=4);
} else if (depth_m == 3){
(M=3);
} else if (depth_m == 2){
(M=2);
} else if (depth_m == 1){
(M=1);
} else {
(M=0); // upper row
}
/* // used for development purposes
Serial.print(“m: ”);
Serial.println(depth_m);
Serial.print(“cm: ”);
Serial.println(depth_cm);
Serial.print(“M: ”); Serial.println(M); // for development purposes
Serial.print(“N: ”); Serial.println(N); // for development purposes
delay(500);
*/
// draw bargraph
microbit.drawLine(0, M, N, M, LED_ON);
} // send value to serial port for plotter
Serial.print(press_delta);
// draw indicator lines and fix displayed range
Serial.print(“ ”); Serial.print(0);
Serial.print(“ ”); Serial.print(-500);
Serial.print(“ ”); Serial.println(500);
delay(500); // Measure twice a second
}
//-----------------------------------------------------------------------------------------------------------------------------------------------------
// the following is required for the bmp/bme280 sensor,keep as it is
void readTrim()
{
uint8_t data[32],i=0; // Fix 2014/04/06
Wire.beginTransmission(BME280_ADDRESS);
Wire.write(0x88);
Wire.endTransmission();
Wire.requestFrom(BME280_ADDRESS,24); // Fix 2014/04/06
while(Wire.available()){
data[i] = Wire.read();
i++;
}
Wire.beginTransmission(BME280_ADDRESS); // Add 2014/04/06
Wire.write(0xA1); // Add 2014/04/06
Wire.endTransmission(); // Add 2014/04/06
Wire.requestFrom(BME280_ADDRESS,1); // Add 2014/04/06
data[i] = Wire.read(); // Add 2014/04/06
i++; // Add 2014/04/06
Wire.beginTransmission(BME280_ADDRESS);
Wire.write(0xE1);
Wire.endTransmission();
Wire.requestFrom(BME280_ADDRESS,7); // Fix 2014/04/06
while(Wire.available()){
data[i] = Wire.read();
i++;
}
dig_T1 = (data[1] 《《 8) | data[0];
dig_P1 = (data[7] 《《 8) | data[6];
dig_P2 = (data[9] 《《 8) | data[8];
dig_P3 = (data[11]《《 8) | data[10];
dig_P4 = (data[13]《《 8) | data[12];
dig_P5 = (data[15]《《 8) | data[14];
dig_P6 = (data[17]《《 8) | data[16];
dig_P7 = (data[19]《《 8) | data[18];
dig_T2 = (data[3] 《《 8) | data[2];
dig_T3 = (data[5] 《《 8) | data[4];
dig_P8 = (data[21]《《 8) | data[20];
dig_P9 = (data[23]《《 8) | data[22];
dig_H1 = data[24];
dig_H2 = (data[26]《《 8) | data[25];
dig_H3 = data[27];
dig_H4 = (data[28]《《 4) | (0x0F & data[29]);
dig_H5 = (data[30] 《《 4) | ((data[29] 》》 4) & 0x0F); // Fix 2014/04/06
dig_H6 = data[31]; // Fix 2014/04/06
}
void writeReg(uint8_t reg_address, uint8_t data)
{
Wire.beginTransmission(BME280_ADDRESS);
Wire.write(reg_address);
Wire.write(data);
Wire.endTransmission();
}
void readData()
{
int i = 0;
uint32_t data[8];
Wire.beginTransmission(BME280_ADDRESS);
Wire.write(0xF7);
Wire.endTransmission();
Wire.requestFrom(BME280_ADDRESS,8);
while(Wire.available()){
data[i] = Wire.read();
i++;
}
pres_raw = (data[0] 《《 12) | (data[1] 《《 4) | (data[2] 》》 4);
temp_raw = (data[3] 《《 12) | (data[4] 《《 4) | (data[5] 》》 4);
hum_raw = (data[6] 《《 8) | data[7];
}
signed long int calibration_T(signed long int adc_T)
{
signed long int var1, var2, T;
var1 = ((((adc_T 》》 3) - ((signed long int)dig_T1《《1))) * ((signed long int)dig_T2)) 》》 11;
var2 = (((((adc_T 》》 4) - ((signed long int)dig_T1)) * ((adc_T》》4) - ((signed long int)dig_T1))) 》》 12) * ((signed long int)dig_T3)) 》》 14;
t_fine = var1 + var2;
T = (t_fine * 5 + 128) 》》 8;
return T;
}
unsigned long int calibration_P(signed long int adc_P)
{
signed long int var1, var2;
unsigned long int P;
var1 = (((signed long int)t_fine)》》1) - (signed long int)64000;
var2 = (((var1》》2) * (var1》》2)) 》》 11) * ((signed long int)dig_P6);
var2 = var2 + ((var1*((signed long int)dig_P5))《《1);
var2 = (var2》》2)+(((signed long int)dig_P4)《《16);
var1 = (((dig_P3 * (((var1》》2)*(var1》》2)) 》》 13)) 》》3) + ((((signed long int)dig_P2) * var1)》》1))》》18;
var1 = ((((32768+var1))*((signed long int)dig_P1))》》15);
if (var1 == 0)
{
return 0;
}
P = (((unsigned long int)(((signed long int)1048576)-adc_P)-(var2》》12)))*3125;
if(P《0x80000000)
{
P = (P 《《 1) / ((unsigned long int) var1);
}
else
{
P = (P / (unsigned long int)var1) * 2;
}
var1 = (((signed long int)dig_P9) * ((signed long int)(((P》》3) * (P》》3))》》13)))》》12;
var2 = (((signed long int)(P》》2)) * ((signed long int)dig_P8))》》13;
P = (unsigned long int)((signed long int)P + ((var1 + var2 + dig_P7) 》》 4));
return P;
}
unsigned long int calibration_H(signed long int adc_H)
{
signed long int v_x1;
v_x1 = (t_fine - ((signed long int)76800));
v_x1 = (((((adc_H 《《 14) -(((signed long int)dig_H4) 《《 20) - (((signed long int)dig_H5) * v_x1)) +
((signed long int)16384)) 》》 15) * (((((((v_x1 * ((signed long int)dig_H6)) 》》 10) *
(((v_x1 * ((signed long int)dig_H3)) 》》 11) + ((signed long int) 32768))) 》》 10) + (( signed long int)2097152)) *
((signed long int) dig_H2) + 8192) 》》 14));
v_x1 = (v_x1 - (((((v_x1 》》 15) * (v_x1 》》 15)) 》》 7) * ((signed long int)dig_H1)) 》》 4));
v_x1 = (v_x1 《 0 ? 0 : v_x1);
v_x1 = (v_x1 》 419430400 ? 419430400 : v_x1);
return (unsigned long int)(v_x1 》》 12);
步骤6:主要简化:MakeCode/JavaScript代码

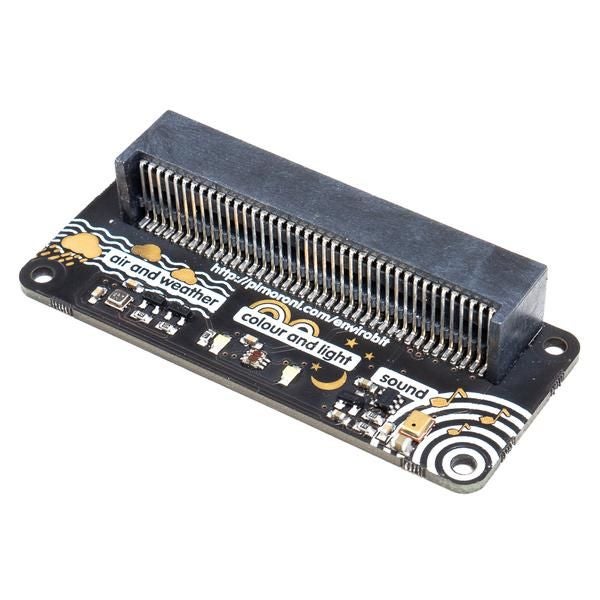
2018年5月,Pimoroni发布了enviro:bit,它带有BME280压力/湿度/温度传感器,TCS3472光和颜色传感器以及MEMS麦克风。此外,他们还为MakeCode编辑器提供了一个JavaScript库,为这些传感器提供了一个MicroPython库。
我一直在使用他们的MakeCode库为我的设备开发脚本。附上你找到相应的十六进制文件,你可以直接复制到你的micro:bit。
下面你会找到相应的JavaScript代码。池中的测试与早期版本的脚本运行良好,所以我认为它们也可以正常工作。除了基本的条形图版本外,还有一个十字准线版本(X)和一个L版本,旨在使阅读更容易,特别是在光线不足的情况下。选择你喜欢的那个。
let Column = 0
let Meter = 0
let remain = 0
let Row = 0
let Delta = 0
let Ref = 0
let Is = 0
Is = 1012
basic.showLeds(`
# # # # #
# 。 . 。 #
# 。 # 。 #
# 。 . 。 #
# # # # #
`)
Ref = 1180
basic.clearScreen()
basic.forever(() =》 {
basic.clearScreen()
if (input.buttonIsPressed(Button.A)) {
Ref = envirobit.getPressure()
basic.showLeds(`
# 。 # 。 #
。 # 。 # 。
# # # # #
。 # 。 # 。
# 。 # 。 #
`)
basic.pause(1000)
} else if (input.buttonIsPressed(Button.B)) {
basic.showString(“” + Row + “。” + remain + “ m”)
basic.pause(200)
basic.clearScreen()
} else {
Is = envirobit.getPressure()
Delta = Is - Ref
Meter = Math.abs(Delta)
if (Meter 》= 400) {
Row = 4
} else if (Meter 》= 300) {
Row = 3
} else if (Meter 》= 200) {
Row = 2
} else if (Meter 》= 100) {
Row = 1
} else {
Row = 0
}
remain = Meter - Row * 100
if (remain 》= 80) {
Column = 4
} else if (remain 》= 60) {
Column = 3
} else if (remain 》= 40) {
Column = 2
} else if (remain 》= 20) {
Column = 1
} else {
Column = 0
}
for (let ColA = 0; ColA 《= Column; ColA++) {
led.plot(ColA, Row)
}
basic.pause(500)
}
})
第7步:Enviro:位版本





与此同时,我收到了enviro:bit(20 GBP)和power:bit(6 GBP),来自Pimoroni。
如前所述,enviro:bit配有BME280压力,湿度和温度传感器,还有光和颜色传感器(参见此处的应用)和MEMS麦克风。
power:bit是一个很好的解决方案,可以为micro:bit供电,并带有一个开/关开关。
最棒的是它只是点击和使用,没有焊接,电缆,面包板。
将enviro:bit添加到micro:bit,将代码加载到micro:bit,使用它。
在这种情况下,我使用micro,power和enviro:bit,将它们放在一个Ziploc包中,放在一个透明的防水塑料袋中,用于手机,准备就绪。一个非常快速和整洁的解决方案。看图片。开关足够大,可以通过保护层使用。
它已经在水中进行了测试,运行良好。在约1.8米的深度处,测量值约为1.7米。对于快速廉价的解决方案来说并不算太糟糕,但远非完美。调整需要一段时间,因此您可能需要在一定深度停留约10-15秒。
步骤8:电缆和传感器探头版本
这实际上是第一个想法a。用于微型:位深度计,最后要构建。
在这里,我将BMP280传感器焊接到5米长的4线电缆上,并在另一端放置了母跳线。
为了保护传感器免受水的侵害,电缆穿过用过的葡萄酒软木塞。软木塞的末端用热胶密封。在我将两个切口切入软木塞之前,两者都在它周围。然后我将传感器装入海绵球中,在其周围放置一个气球,并将气球的末端固定在软木塞上(下切口)。然后我将3个40克的铅块放入第二个气球中,将其包裹在第一个气囊周围,将重物放在外侧,并将气球的末端固定在第二个凹口处。从第二个气球中取出空气,然后用胶带固定所有东西。查看图片,可能会有更详细的图片。
通过边缘连接器将跳线连接到micro:bit,打开设备并设置参考压力。然后将传感器头缓慢释放到水池底部(10米跳塔,深约4.5米)。
结果:
令我惊讶的是,即使使用这根长电缆也能正常工作。另一方面,但毫不奇怪,在较高压力下测量误差似乎变得更大,据报道估计深度为4米,约为3米。
潜在的应用程序:
通过一些错误修正,该设备可用于测量深度约为4米。
与Arduino或Raspberry Pi配合使用,可用于测量和控制水池或水箱的灌装点,例如:如果水位高于或低于某些阈值,则发出警告。
-
测量仪
+关注
关注
1文章
605浏览量
31991
发布评论请先 登录
相关推荐
EPSON助力智能泳池清洁机器人导航

爱普生陀螺仪模块助力智能泳池清洁机器人导航方案

安全效率并存:泳池清洁机器人的无线充电进化
告别电线束缚:泳池清扫机器人的无线充电创新
EPSON爱普生助力智能泳池清洁机器人导航方案应用

爱普生电子助力智能泳池清洁机器人导航方案
深度数智:专注开发基于RISC-V芯片的创新产品
首款超声波水下测距传感器!推动水下声呐技术进入泳池清洁新蓝海

深度学习服务器怎么做 深度学习服务器diy 深度学习服务器主板用什么
FPGA FIFO深度计算的基本步骤和示例
电应普水下测距传感器赋予泳池清洁机器人智能感知






 工商网监
工商网监
评论