 植物分析无人机的制作图解
植物分析无人机的制作图解
第1步:飞行镜头
这是我的第二次试飞,直升机已经调整好并准备进行植物分析。我的动作相机上有一些板载录音,你可以从鸟眼观察我们美丽的环境。如果您想查看NDVI录音,请转到此指令的最后一步。不幸的是,我没有时间全力以赴如何引导这个三旋翼的视频,但我已经上传了这个短飞行测试视频。
第2步:必需的工具和部件





除了木质喷杆和喷漆外,我每个部分都有在我的工具箱里闲逛,所以这个项目的总成本对我来说大约是5美元,但我会尝试找到eBay或Banggood链接到我使用的每个部分。我强烈建议您四处寻找零件,也许您可以获得比我更好的价格。
工具
烙铁
Dremel工具
3D打印机(我没有,我的朋友帮帮我了)
切割工具
剪线钳
超级胶水
Zip Ties (其中很多, 2种尺寸)
油漆喷涂(用你喜欢的颜色 - 我用黑色)
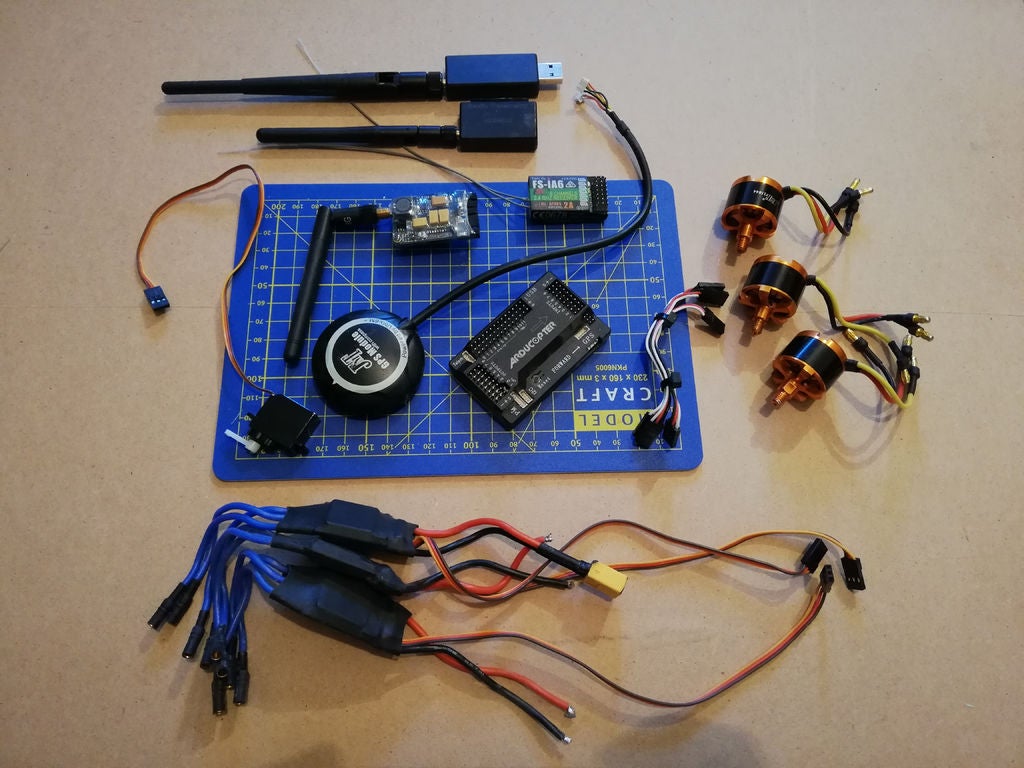
零件
ArduCopter飞行控制器(我使用旧的APM 2.8,但你应该选择PixHawk或PIX Mini)
带磁强计的GPS天线
MAVLink Telelemetry模块(用于地面站通信)
6CH接收器+发射器
视频发射器
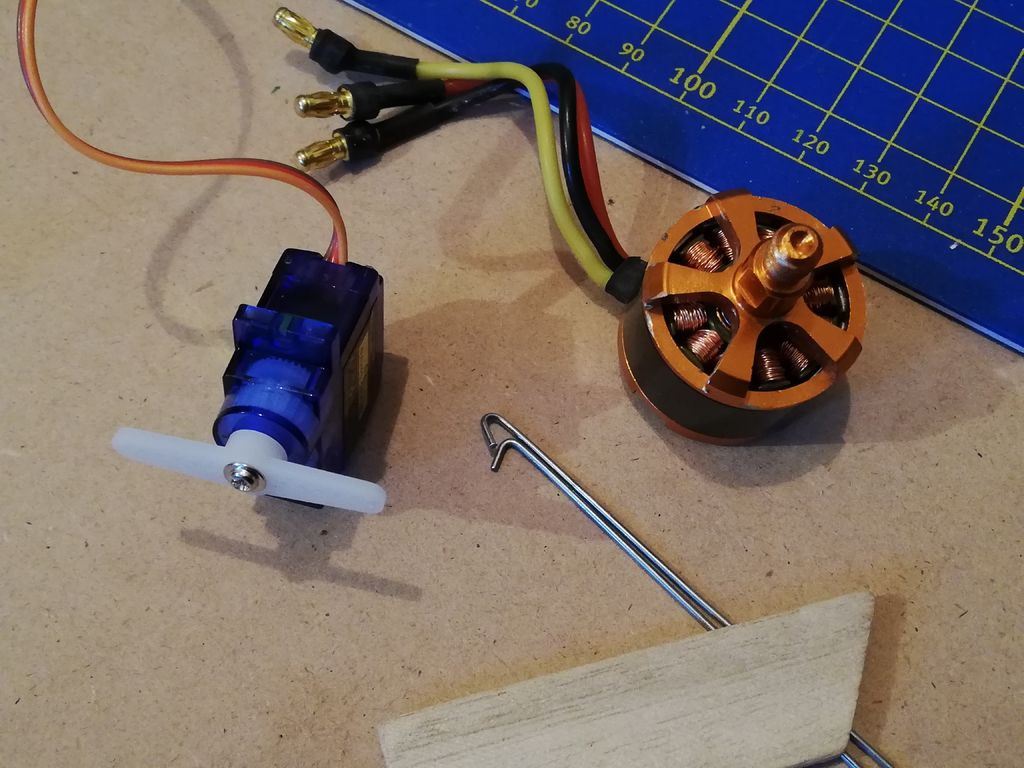
伺服电机(扭矩至少1.5kg)
10“螺旋桨(2 CCW,1 CW +额外更换)
3 30A SimonK E. SCs (电子速度控制器) + 3 920kv电机
3S电池5.2Ah
覆盆子Pi Zero W + NoIR PiCamera (带有infrablue过滤器)
2条电池带
振动阻尼安装座
1.2cm方形木制吊杆(我买了一根1.2米长的杆)
2-3mm厚木质板材
动作相机(我使用了4k功能的GoPro克隆 - SJCAM 5000x)
这些是我用于我的部件无人机,随意根据自己的喜好进行修改。如果你不确定要使用什么,请发表评论,我会尽力帮助你。注意:我使用已停产的APM板作为飞行控制器,因为我有一个备用。飞得很好,但是这个主板不再受支持,所以你应该得到另一个与ArduCopter兼容的飞行控制器,以实现出色的GPS功能。
第3步:剪切框架

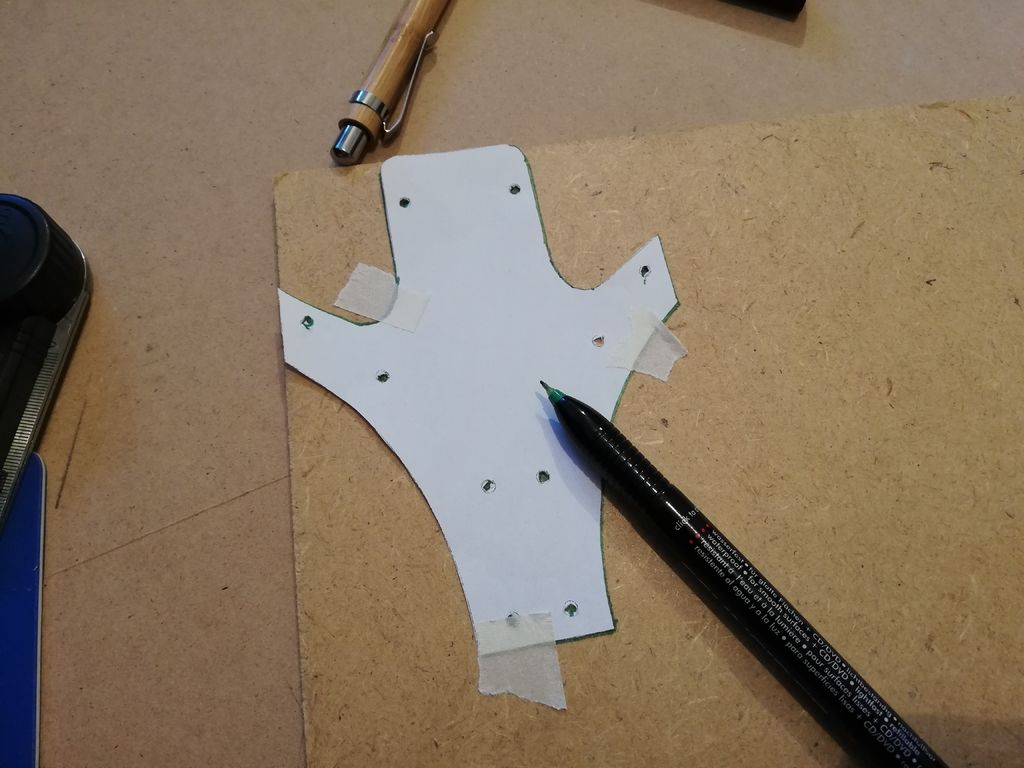


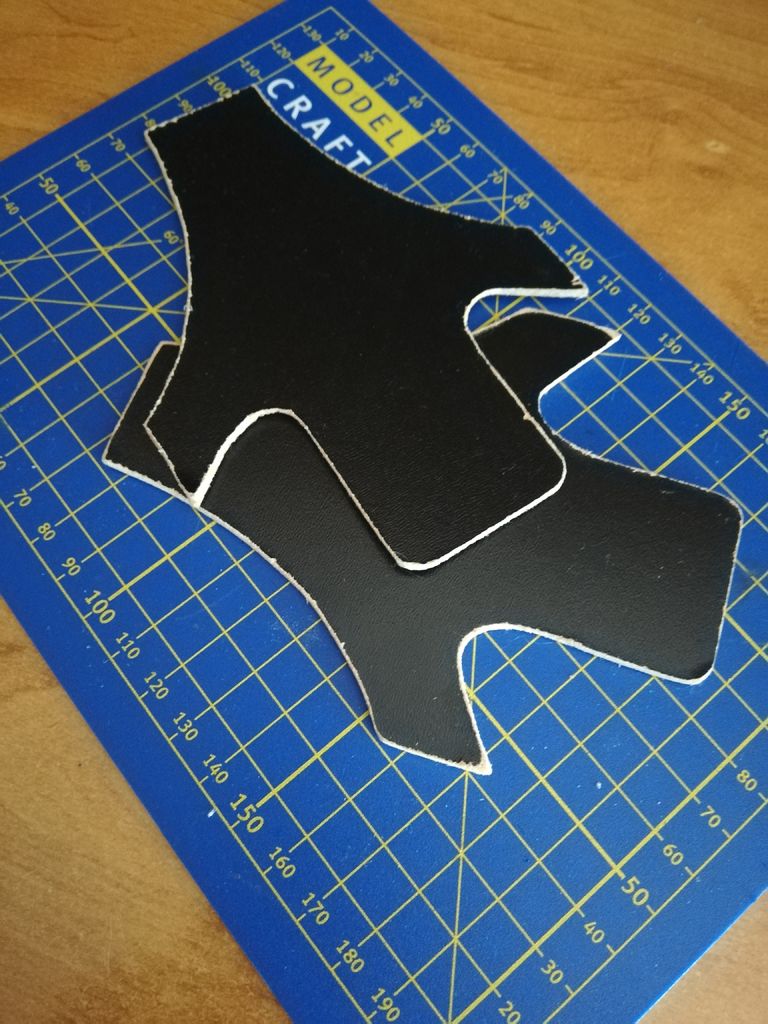

下载 frame.pdf 文件,打印并剪切。检查打印尺寸是否正确,然后用钢笔在木板上标记形状和孔。使用锯切割框架并用3mm钻头钻孔。你只需要其中两个,我只做了4个作为备件。
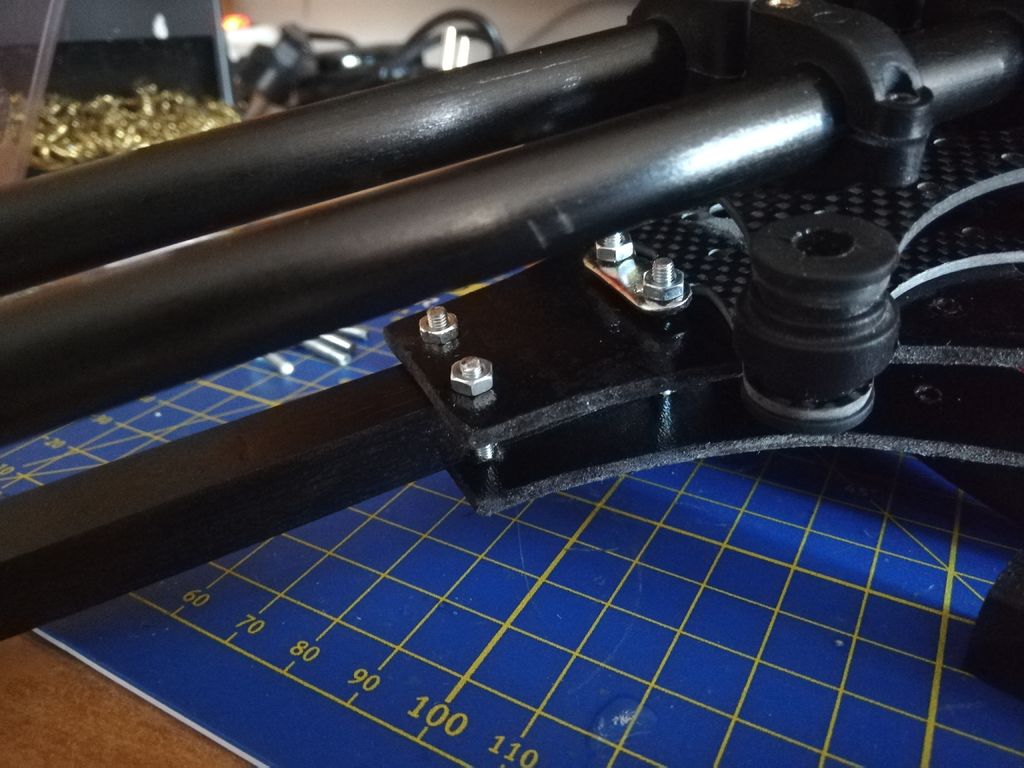
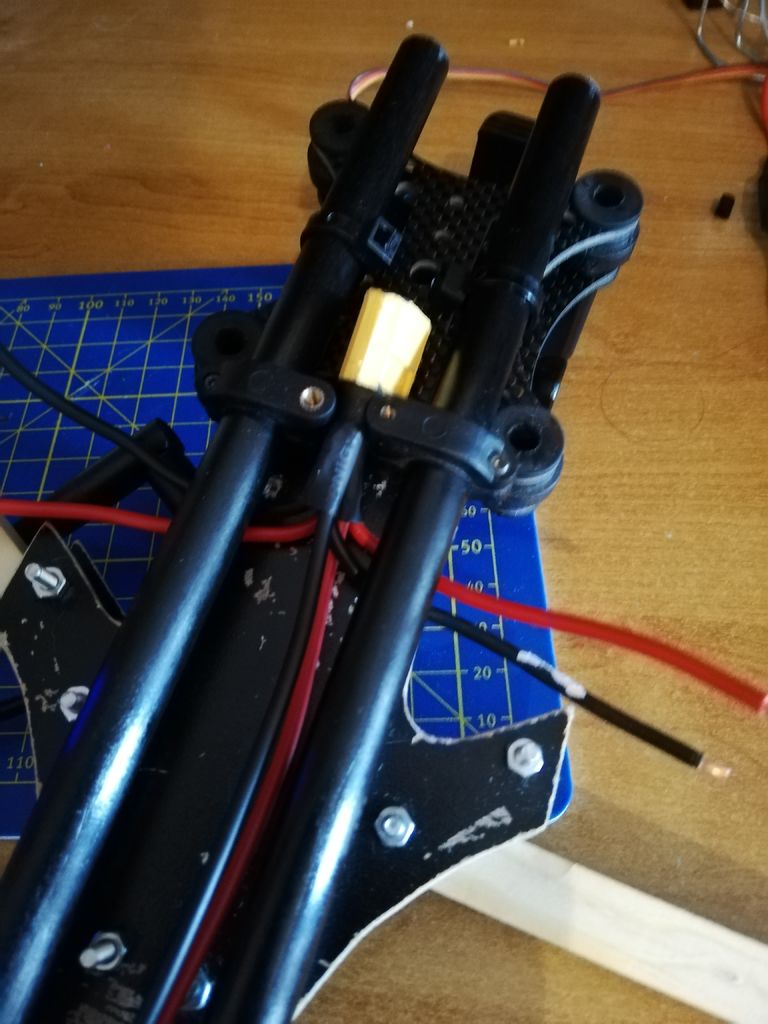
第4步:组装框架
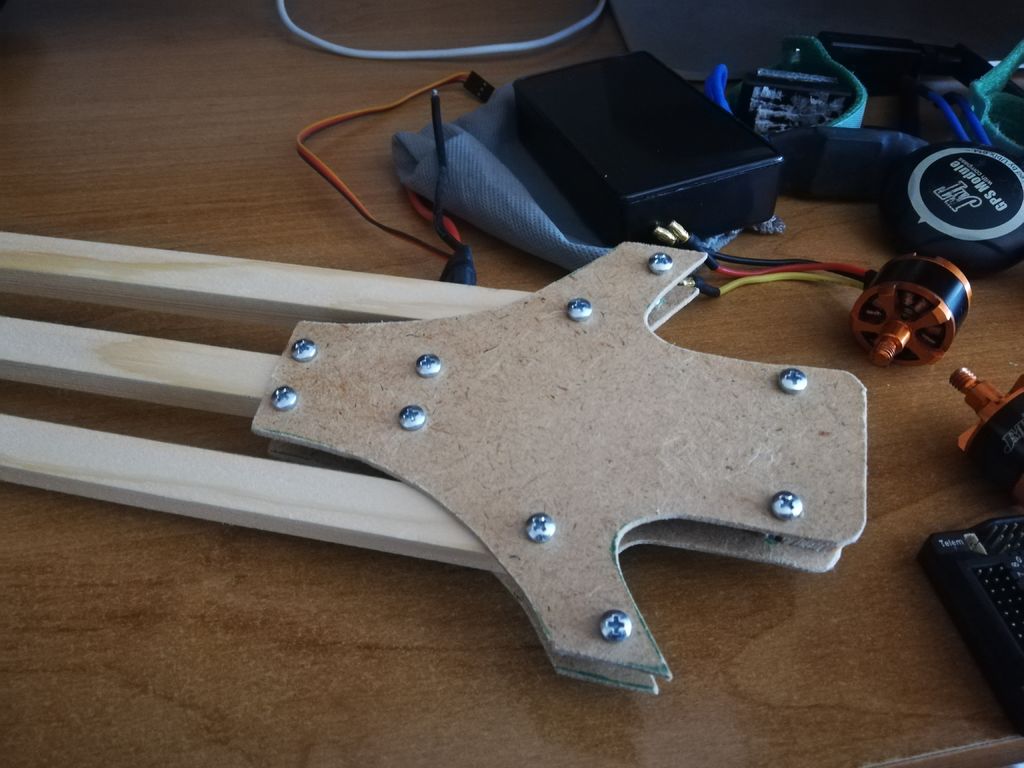
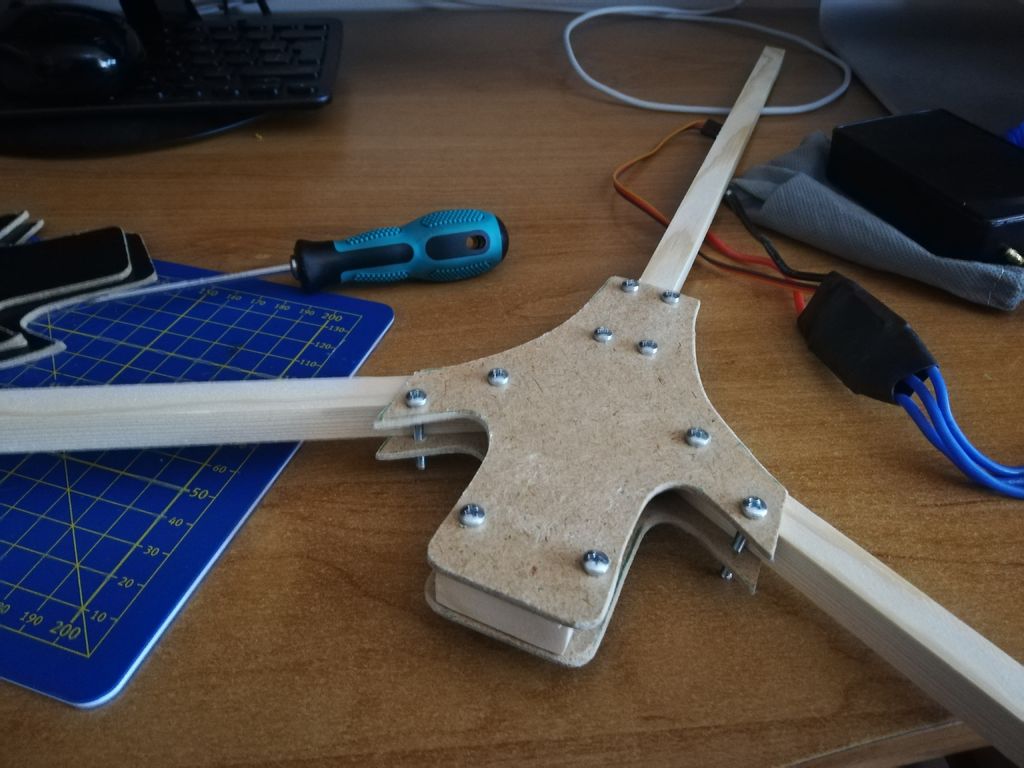
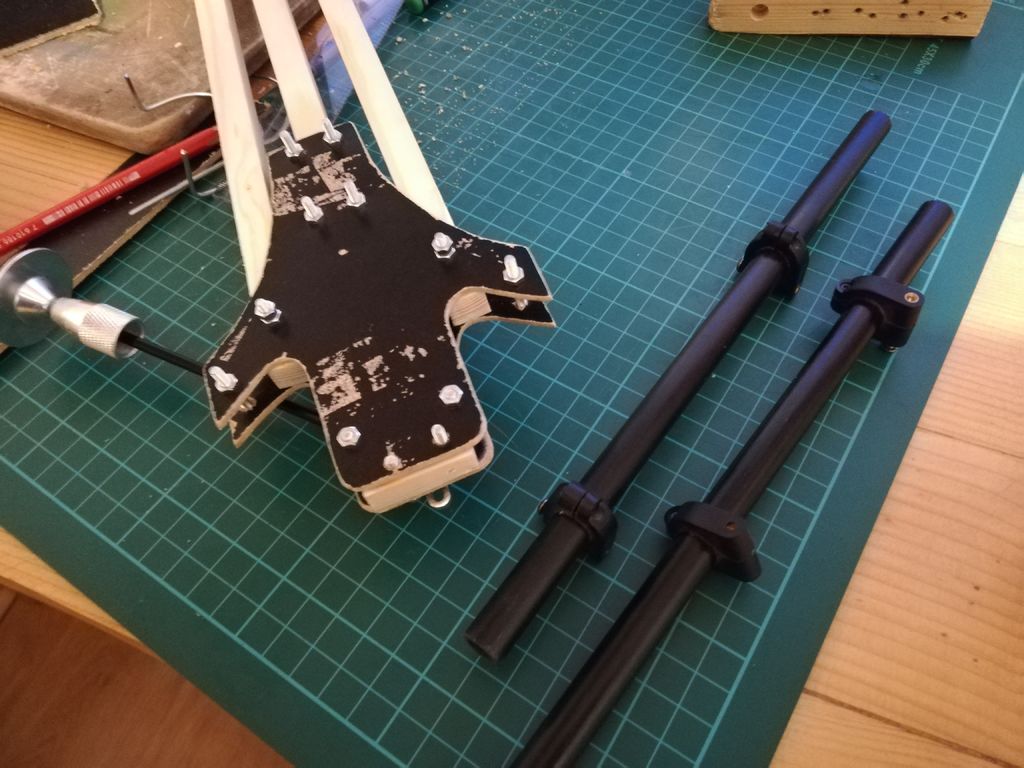

我使用3毫米螺钉和螺母来组装框架。我将每个吊杆切成35厘米长,并将3厘米长的吊杆留在框架的前部。不要过度拧紧关节,但要确保有足够的摩擦力,以免手臂折叠。这是一个非常聪明的设计,我撞了两次,没有任何东西只折回来。
步骤5:为电机钻孔

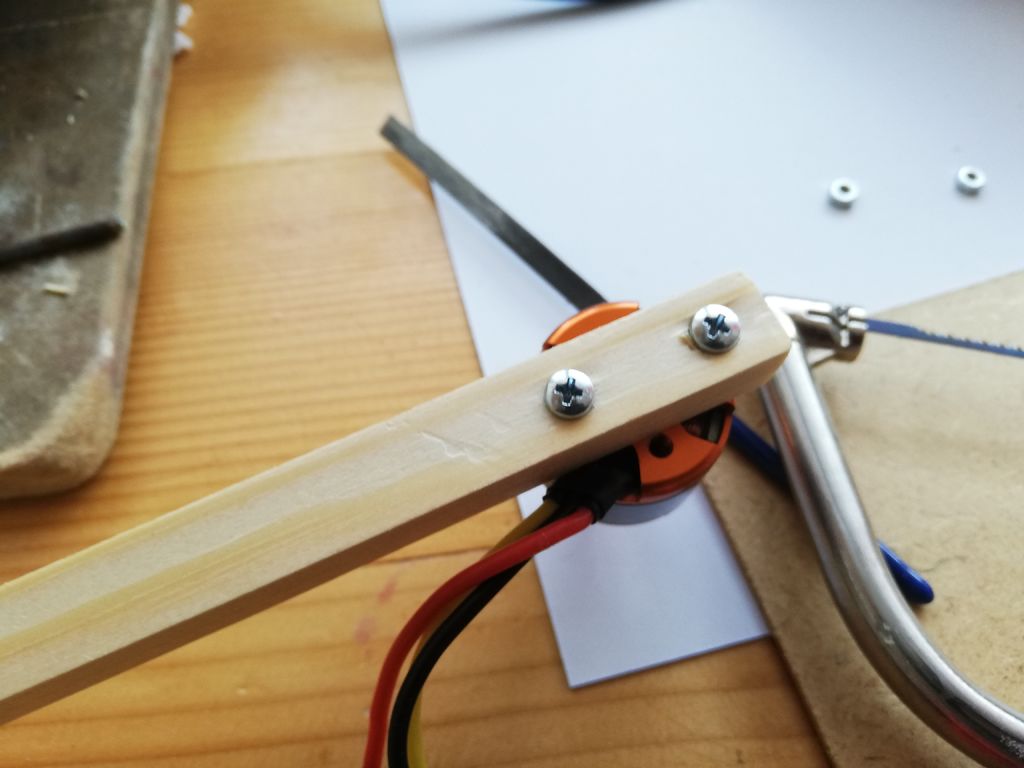
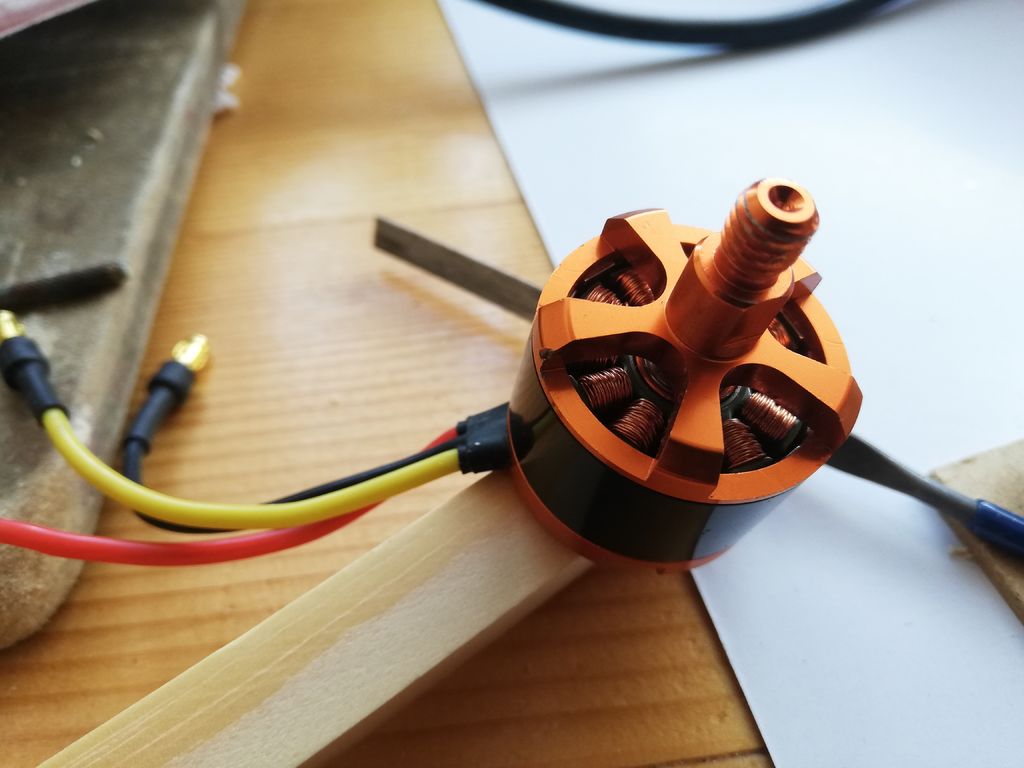


检查电机螺丝的尺寸和它们之间的距离,然后在左右木臂上钻两个孔。我不得不在手臂上钻一个5毫米深,8毫米宽的孔,这样轴就有足够的旋转空间。用砂纸去除那些小碎片并吹掉灰尘。您不希望电机中有任何灰尘,因为这可能会导致不必要的摩擦和热量。
第6步:折叠GPS装载


我不得不为我的GPS天线钻出额外的孔,以便更好地适应。你应该把你的罗盘放高,这样它就不会干扰电机和电线的磁场。这是一个简单的折叠天线,可以帮助我保持设置尽可能紧凑。
第7步:绘制框架



现在你必须拧下一切并完成油漆工作。我最终选择了这种哑光深黑色喷雾。我将零件连接在一个螺纹上并简单地涂上它们。要获得非常好的效果,请使用2层或更多层的涂料。第一层可能看起来有点褪色,因为木头会喝掉水分。嗯,这发生在我的情况下。
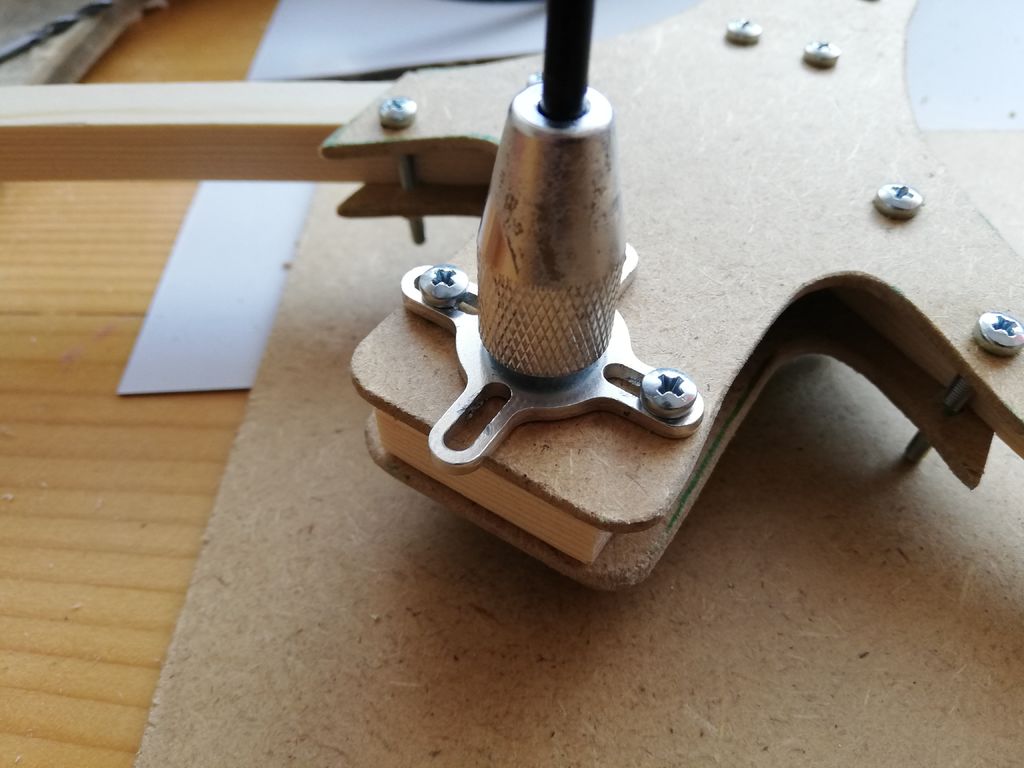
步骤8:安装减振平台




我有这个万向节支架平台,在我的版本中也兼作电池座。你必须用拉链和/或螺丝将它安装在你的框架下面。电池的重量有助于吸收大量的振动,因此您将获得非常好的摄像机镜头。你也可以在塑料杆上安装一些起落架,我觉得这是不必要的。这种黑色效果很好,此时你应该有一个漂亮的框架,是时候设置你的飞行控制器了。
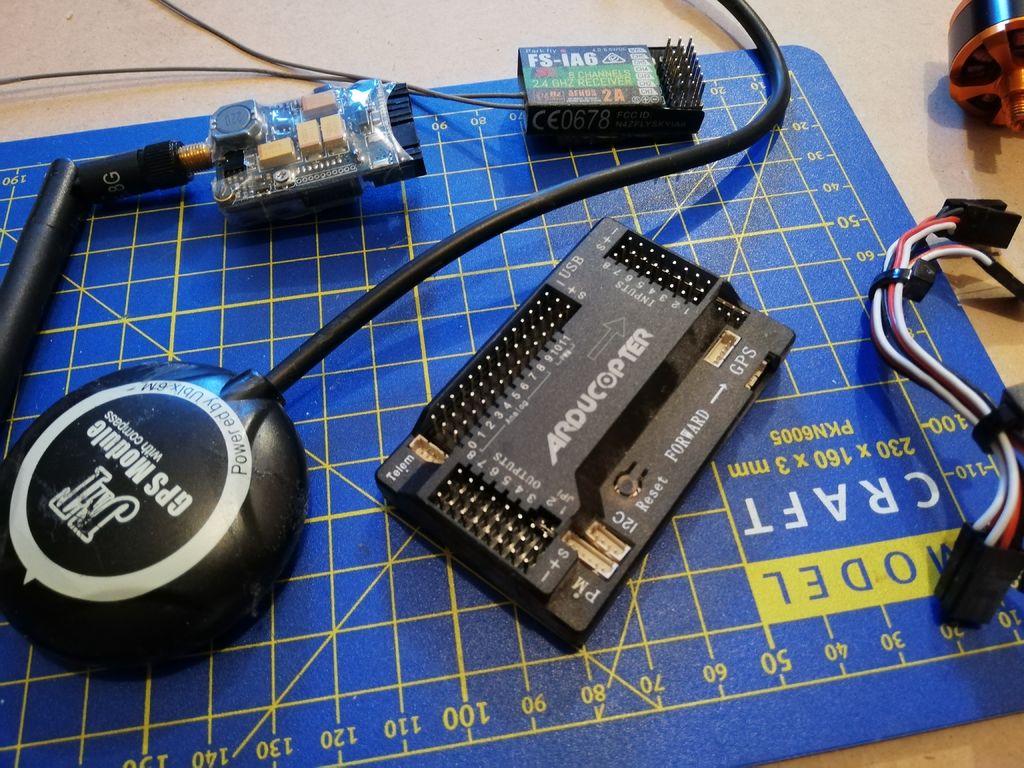
步骤9:设置ArduCopter



设置飞行控制器你需要一个额外的免费软件。在Mac OS上下载Windows上的Mission Planner或APM Planner。当您插入飞行控制器并打开软件时,向导帮助程序将在您的主板上安装最新固件。它还可以帮助您校准指南针,加速度计,无线电控制器和飞行模式。
飞行模式
我建议使用稳定,海拔高度保持,懒人,圆圈,返回家园和土地作为你的六种飞行模式。 Circle 在工厂检查方面非常有用。它将围绕给定的坐标进行轨道运行,因此有助于以非常精确的方式从各个角度分析您的植物。我可以用棍子进行轨道运动,但很难保持完美的圆形。 Loiter 就像在天空中停放无人机一样,因此您可以拍摄高分辨率的NDVI图像,如果您松开信号或松开无人机的方向, RTH 非常有用。
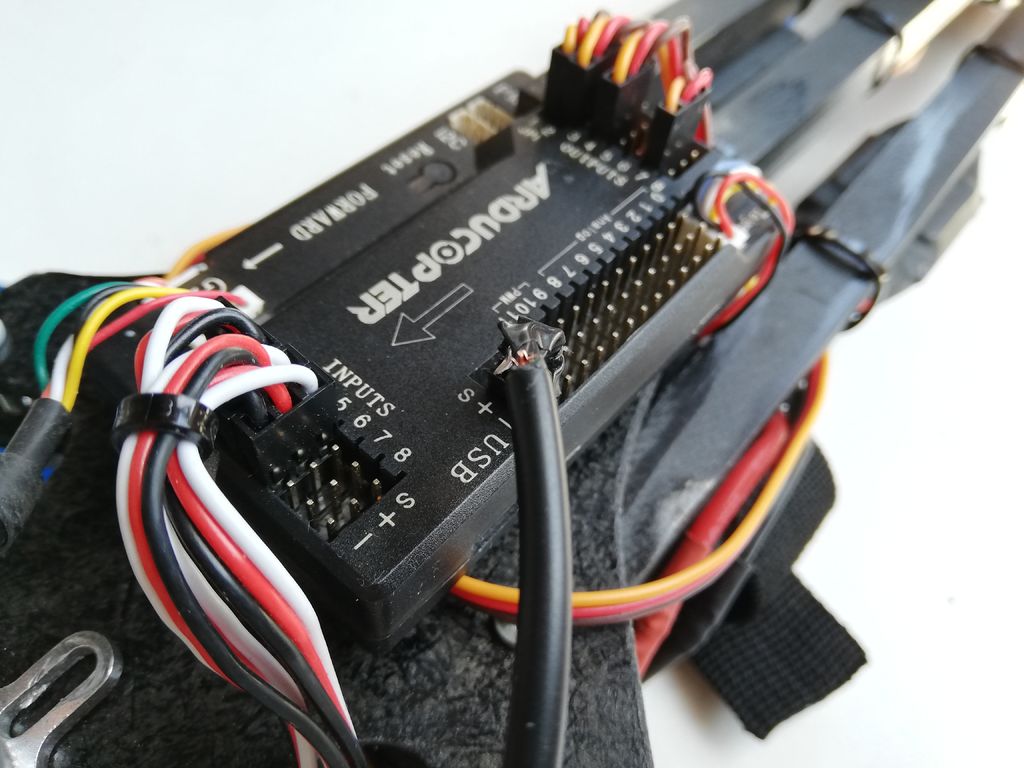
注意接线。使用原理图将ESC插入正确的引脚,并在Mission Planner中检查输入通道的接线。永远不要用道具测试这些!
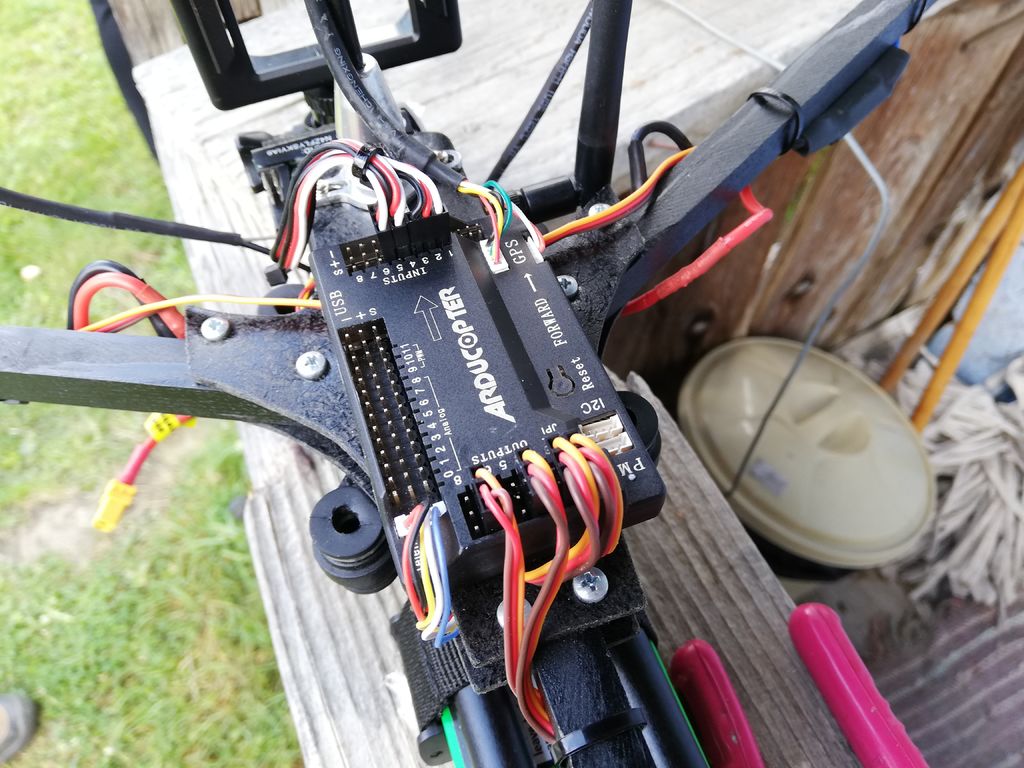
步骤10:安装GPS,摄像头和飞行控制器


一旦你的飞行控制器校准后,您可以使用一些泡沫胶带并将其安装在框架的中间。确保它朝前并有足够的空间容纳电缆。使用3毫米螺丝安装GPS并使用拉链将相机固定到位。这些GoPro克隆带有所有安装实用程序,因此安装这个实用程序非常简单。
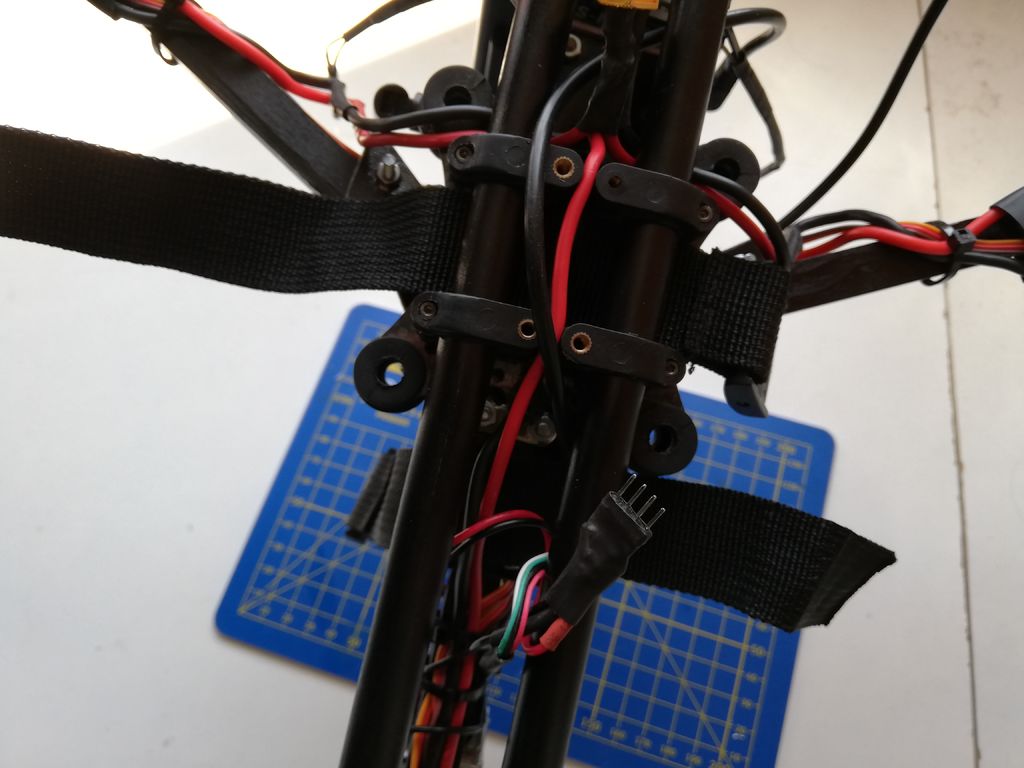
步骤11:电介质和电源电缆
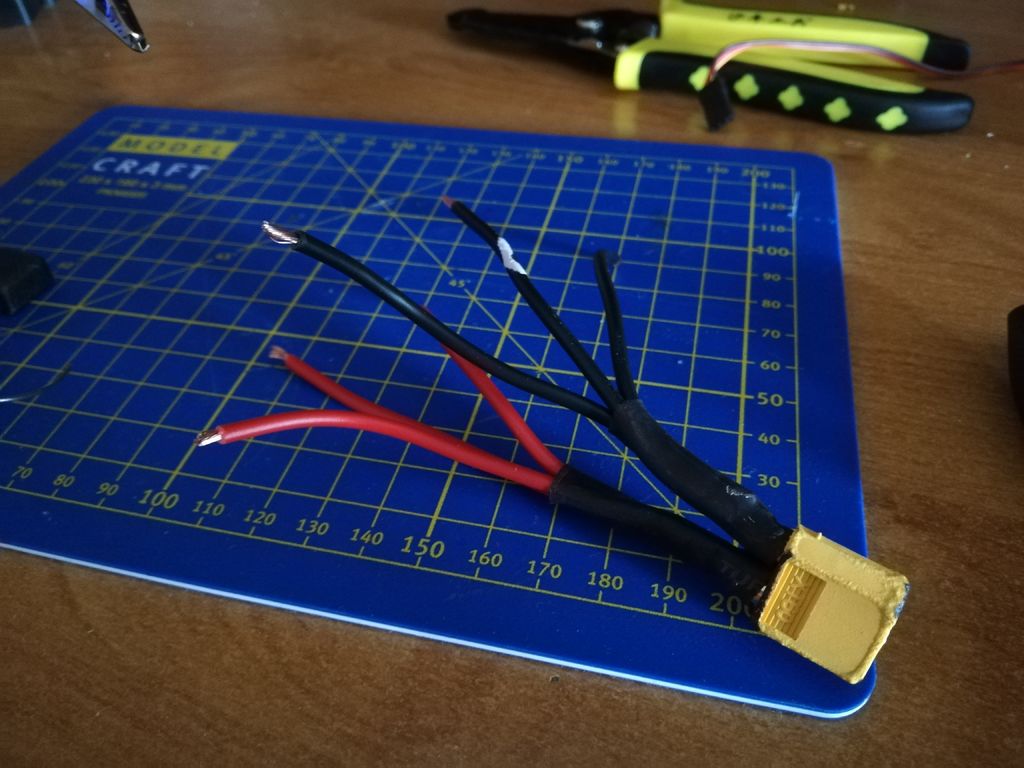
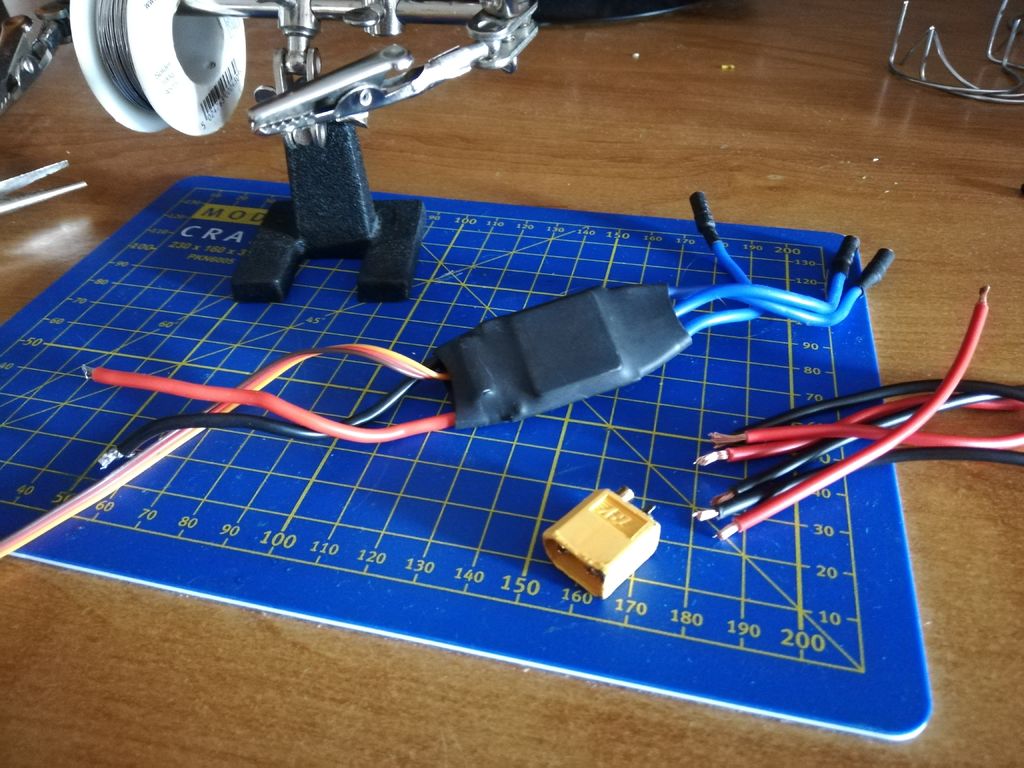
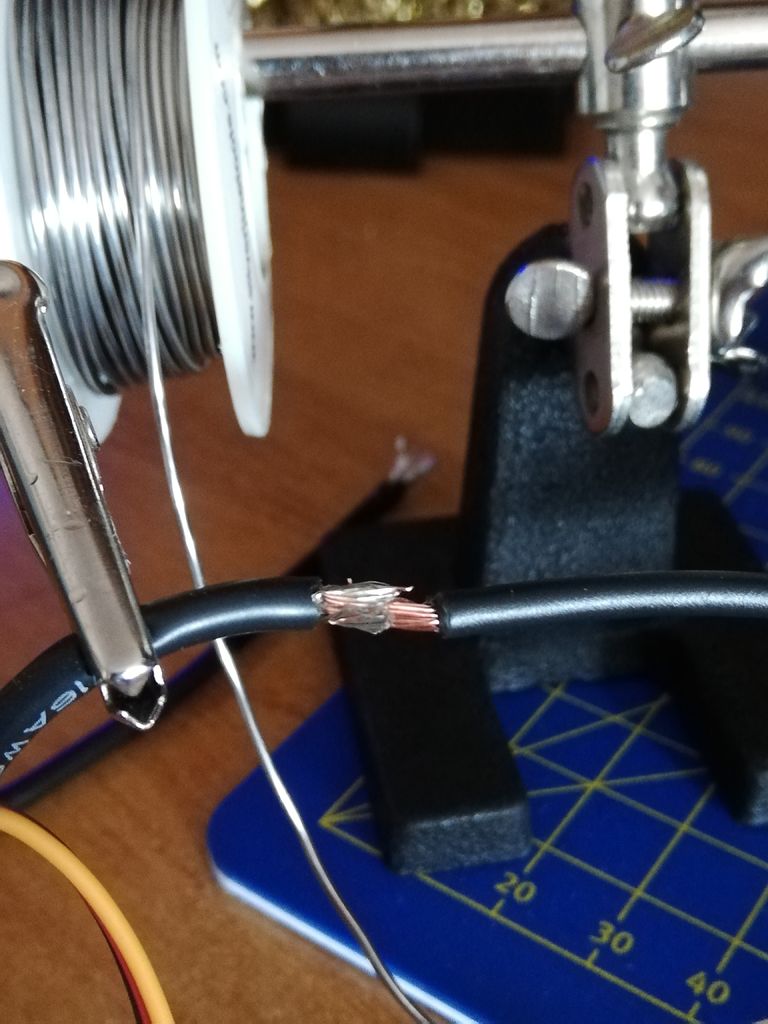


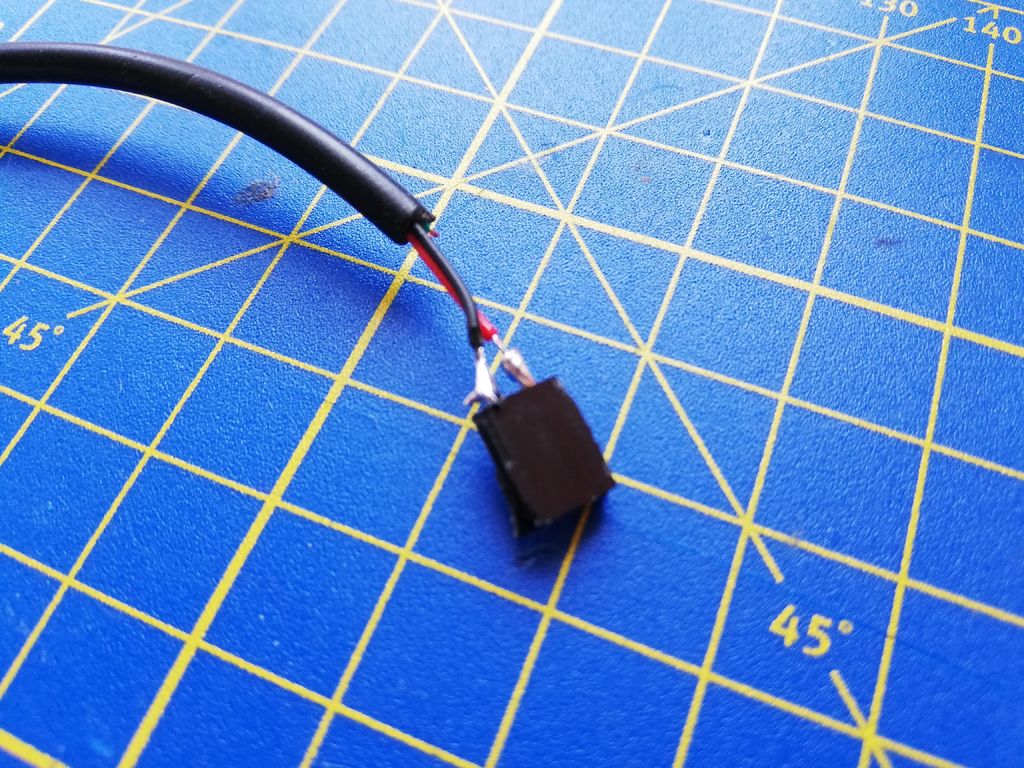
我的电池有一个XT60连接器,所以我将3根正极和3根负极焊接到一个母连接器的每个引脚上。使用一些热缩管来保护连接不会使它们短路(您也可以使用电气胶带)。当你焊接这些粗线时,将它们擦在一起并用铜线固定,然后加入大量熔化的焊料。您不希望没有冷焊点,尤其是在为ESC加电时。
步骤12:接收器和天线


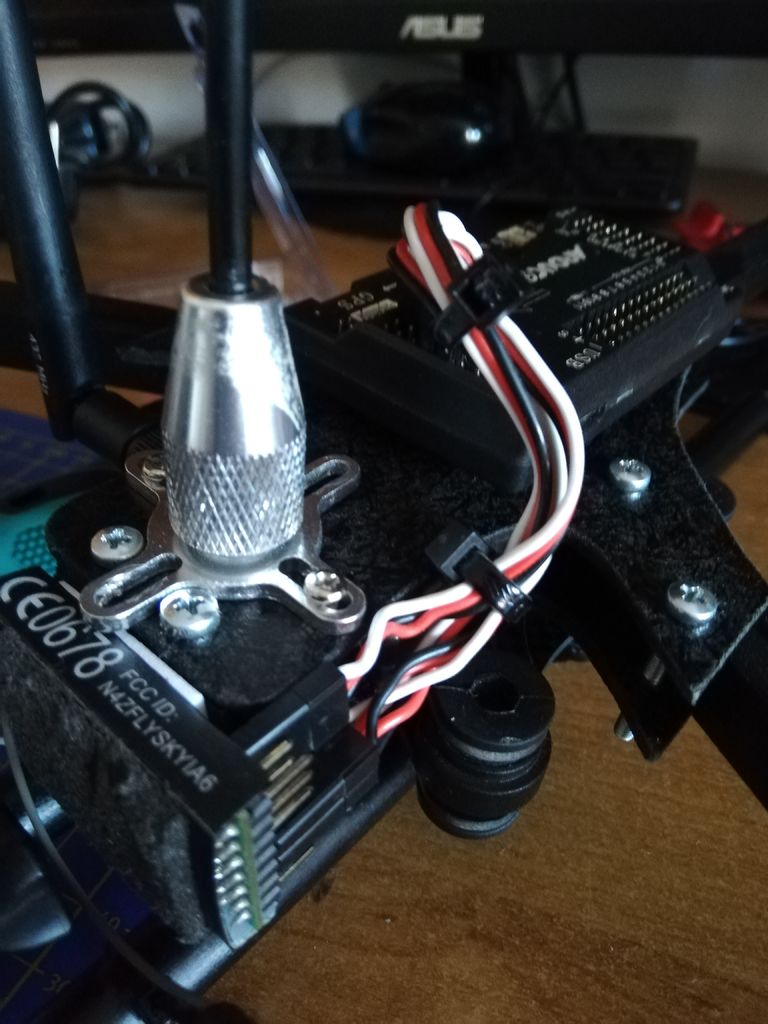

要获得良好的信号接收,您必须将天线安装在90度。我使用拉链和热缩管将我的接收器天线安装在我的无人机前面。大多数接收器都带有电缆,并且通道标有标签,因此应该很容易设置它。
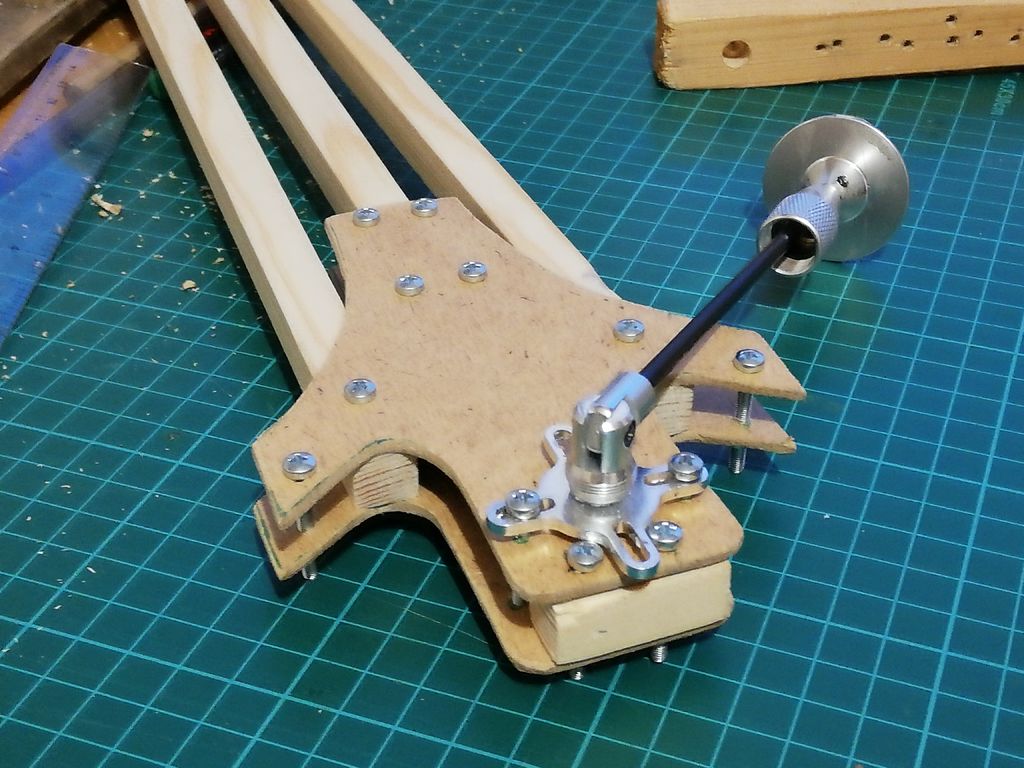
步骤13:尾部机制
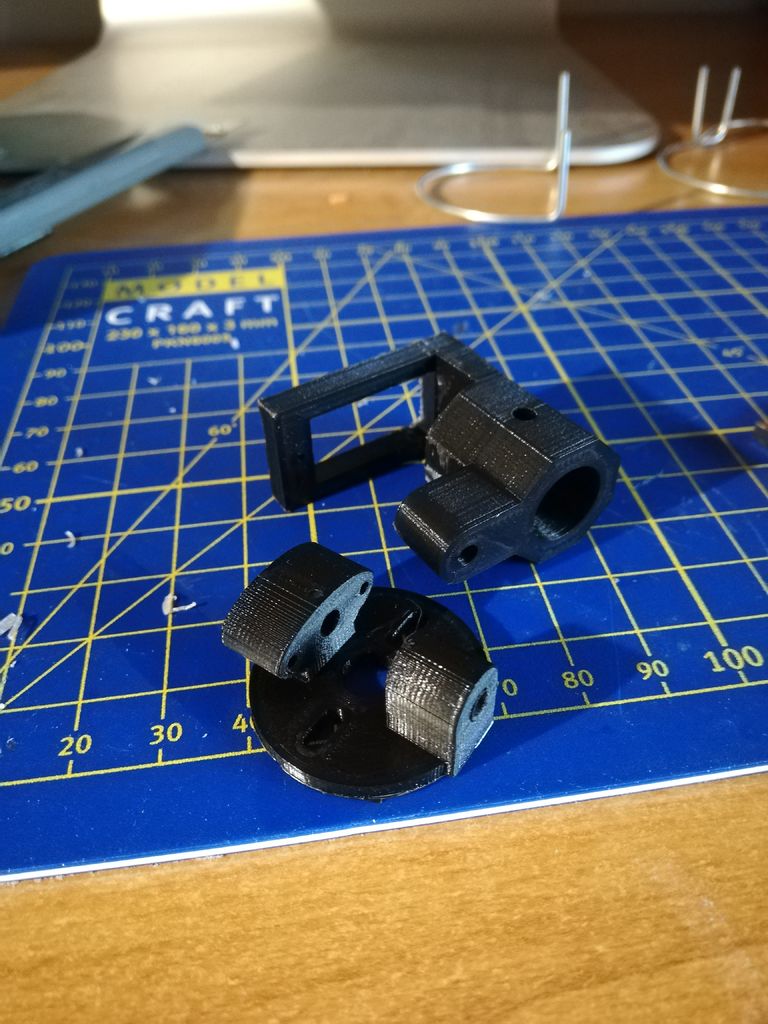
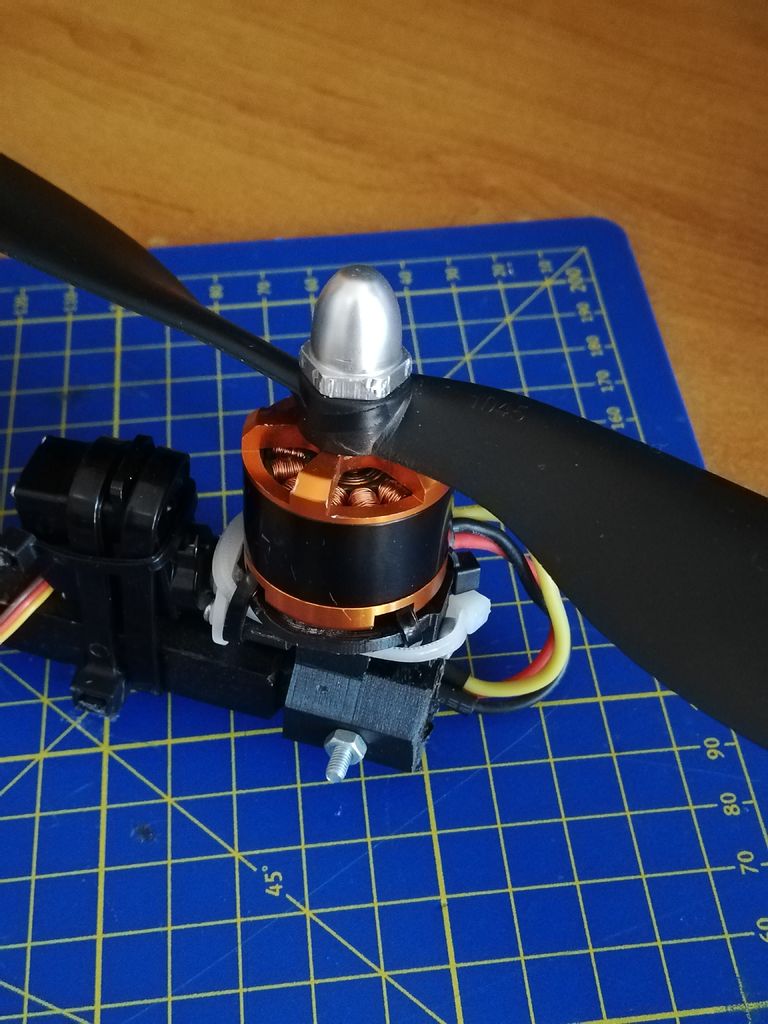
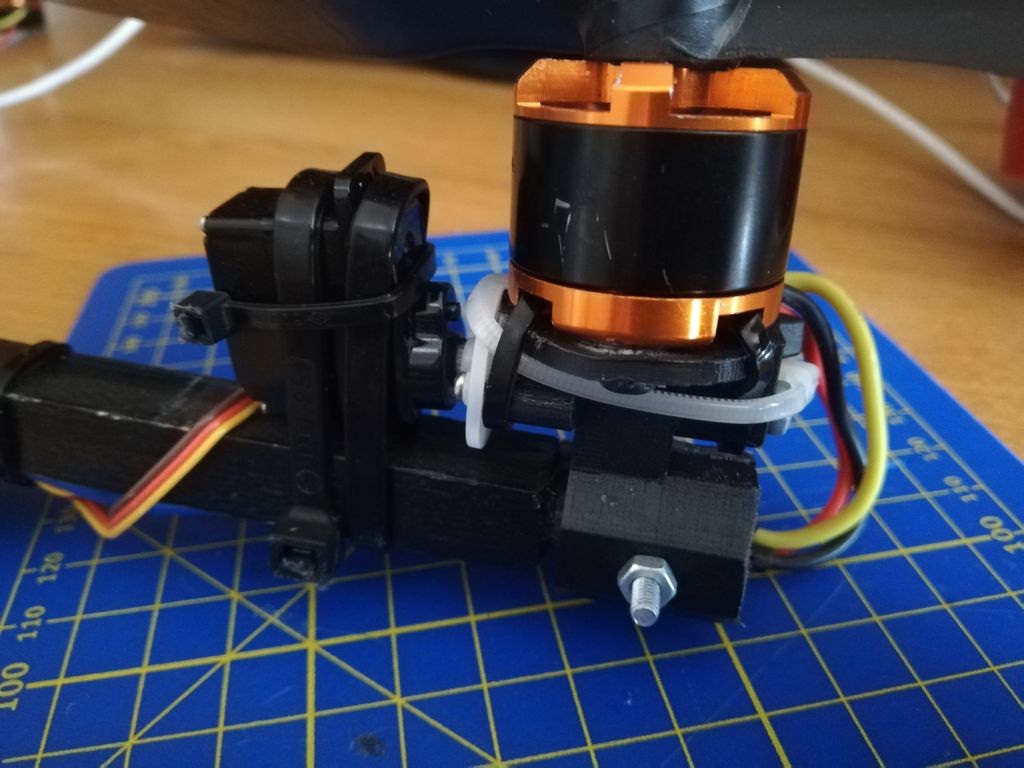
尾部机制是三旋翼的灵魂。我在网上找到了这个设计,所以我试了一下。我觉得原来的设计有点弱,但是如果你扭转了机制,那就完美了。我用dremel工具切割多余的部分。在图片上看起来我的伺服电机可能会受到一点点影响,但它完美无瑕。拧紧螺丝时请使用一滴强力胶水,以免因振动而脱落;或者你可以像我一样拉链马达。
步骤14:进行悬停测试和PID调整
仔细检查所有连接,确保在插入电池时不会油炸任何东西。安装螺旋桨并尝试用无人机盘旋。我的开箱即用非常顺畅,我只需要进行一些偏航调整,因为它的调整方式太多了。我无法在这个Instructable中教授PID调音,我从Joshua Bardwell的视频教程中学到了几乎所有东西。他比我更好地解释了这一点。
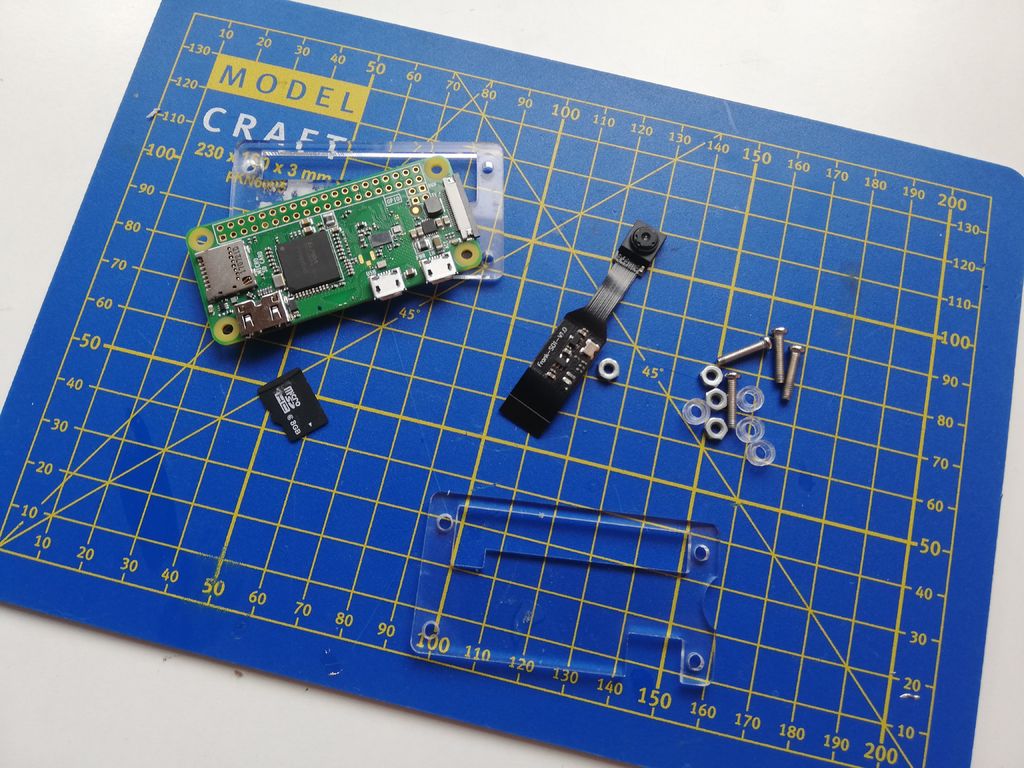
步骤15:选择一个Raspberry并安装Raspbian(Jessie)



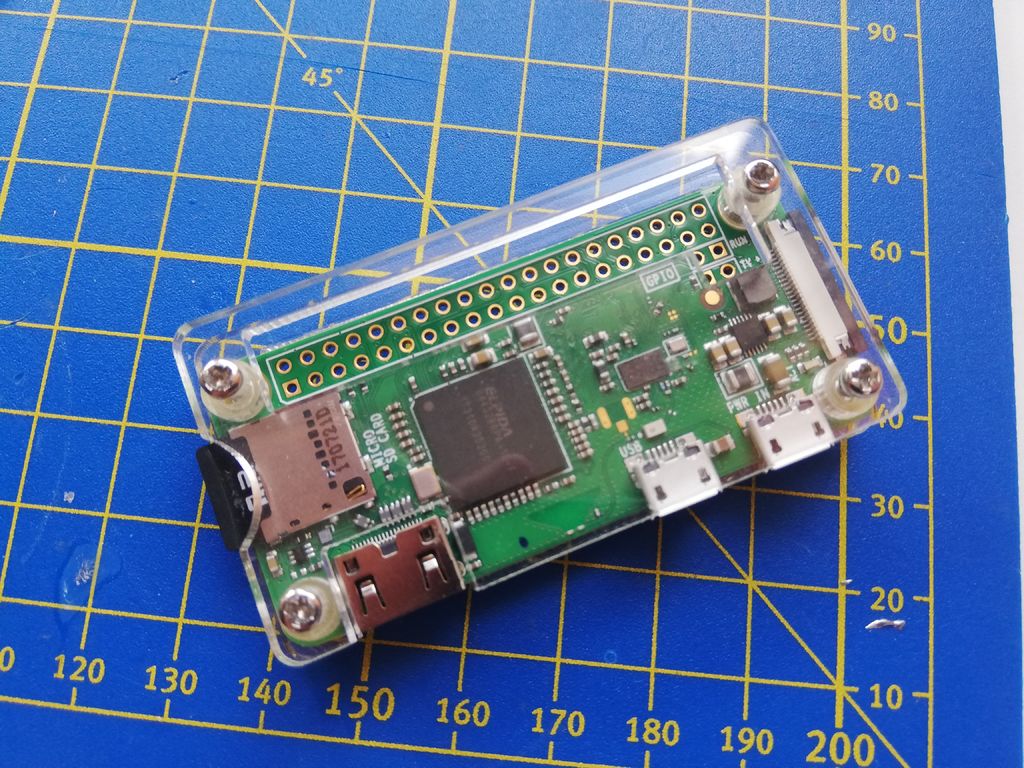

我想尽量保持这个重量轻,所以我选择了RPi Zero W.我使用的是Raspbian Jessie因为版本较新我们用OpenCV来解决原始素材的植被指数问题。如果你想要更高的FPS率,你应该选择Raspberry Pi v4。你可以在这里下载软件。
安装依赖项
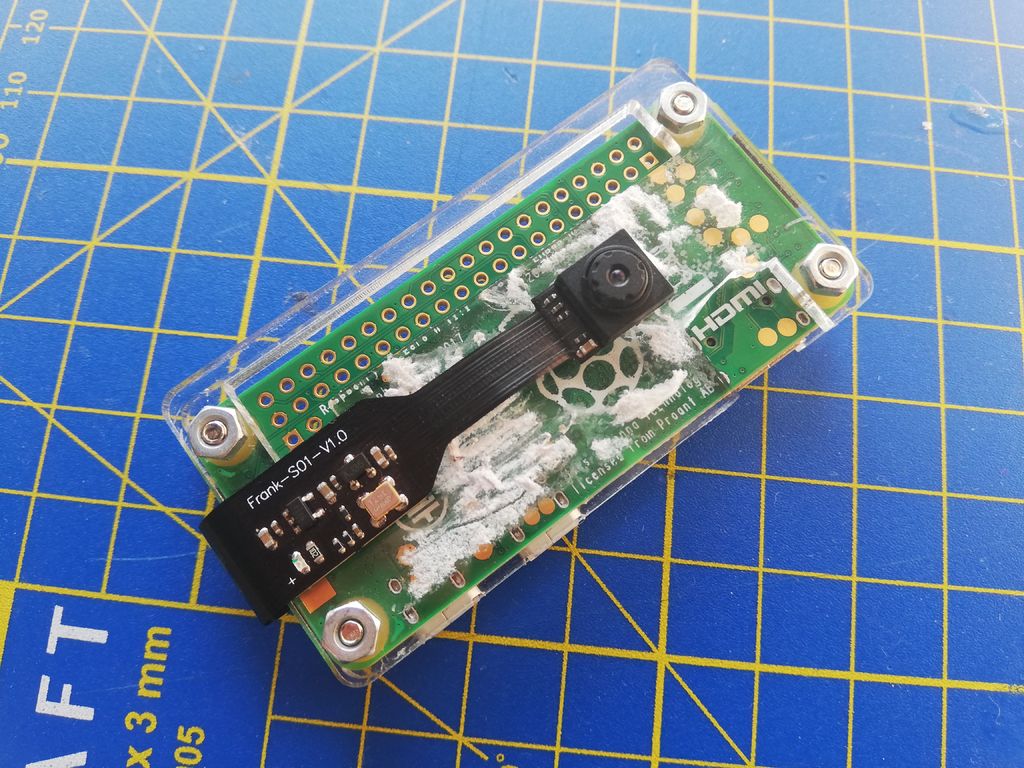
我们将在此项目中使用PiCamera,OpenCV和Numpy。作为图像传感器,我选择了较小的500万像素摄像头,它只与零板兼容。
使用您喜欢的工具(我喜欢Balena Etcher)来闪现您的图像。
使用已连接的显示器启动Raspberry。
启用相机和 SSH 界面。
使用终端中的 ifconfig 检查您的IP地址。
使用 ssh pi @ YOUR_IP 命令将SSH连接到您的RPi。
复制并粘贴说明以安装所需的软件:
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install libtiff5-dev libjasper-dev libpng12-dev
sudo apt-get install libjpeg-dev
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
sudo apt-get install libgtk2.0-dev
sudo apt-get install libatlas-base-dev gfortran
sudo pip install numpy python-opencv
python (to test it)
import cv2
cv2.__version__
您应该看到一个响应,其中包含OpenCV库的版本号。
步骤16:测试NoIR相机和NDVI成像
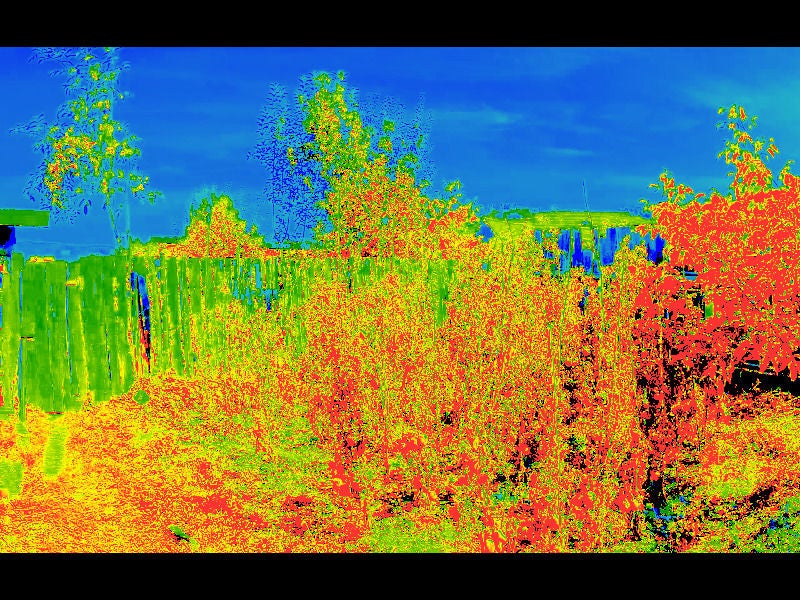

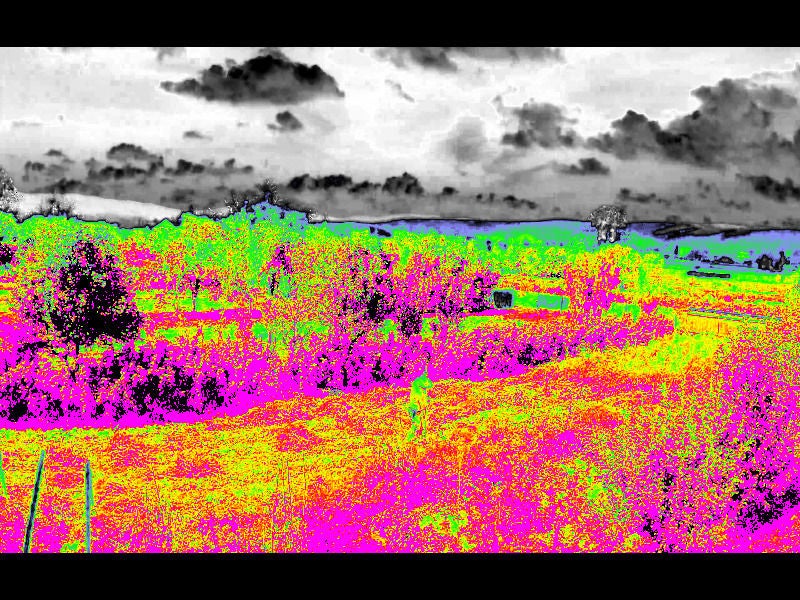
关闭RPi板,插入相机,然后我们可以尝试用它进行一些NDVI成像。你可以看到花朵(红色背景的那个),里面更绿的部分显示出一些光合作用。这是我的第一次测试,用 Infragram 制作。我在他们的网站上学习了所有的公式和颜色映射,以编写一个功能齐全的代码。为了使事情更加自动化,我制作了一个Python脚本来捕获帧,计算NDVI图像并将它们以1080p的形式保存在直升机上。
这些图像将会有一个奇怪的色彩图,它们看起来就像来自另一个星球。进行一些测试,更改一些变量,在第一次任务之前微调传感器。
步骤17:在无人机上安装RPi Zero W

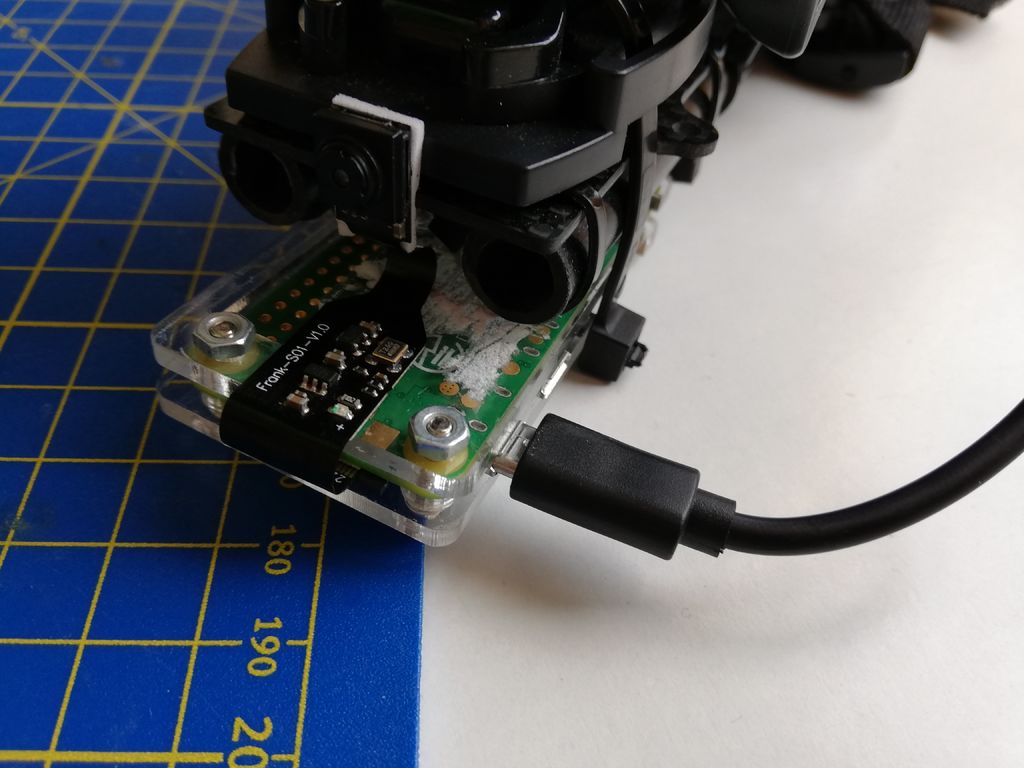
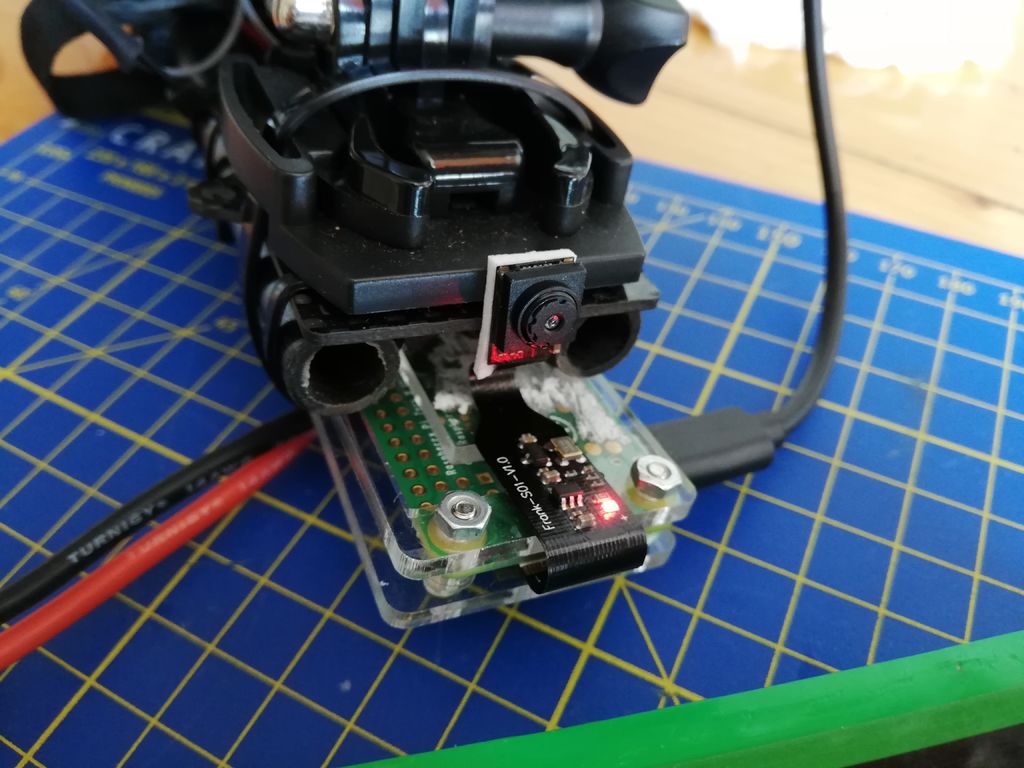
我安装了Pi Zero在三轮车的前面。你可以像我一样向前或向下对着你的相机。我面向前的原因是显示植物和其他非光合作用物体之间的差异。 注意:有些表面可能会反射红外线,或者它们比周围环境温暖,导致它们呈现明亮的黄色。
步骤18:添加视频发送器(可选)
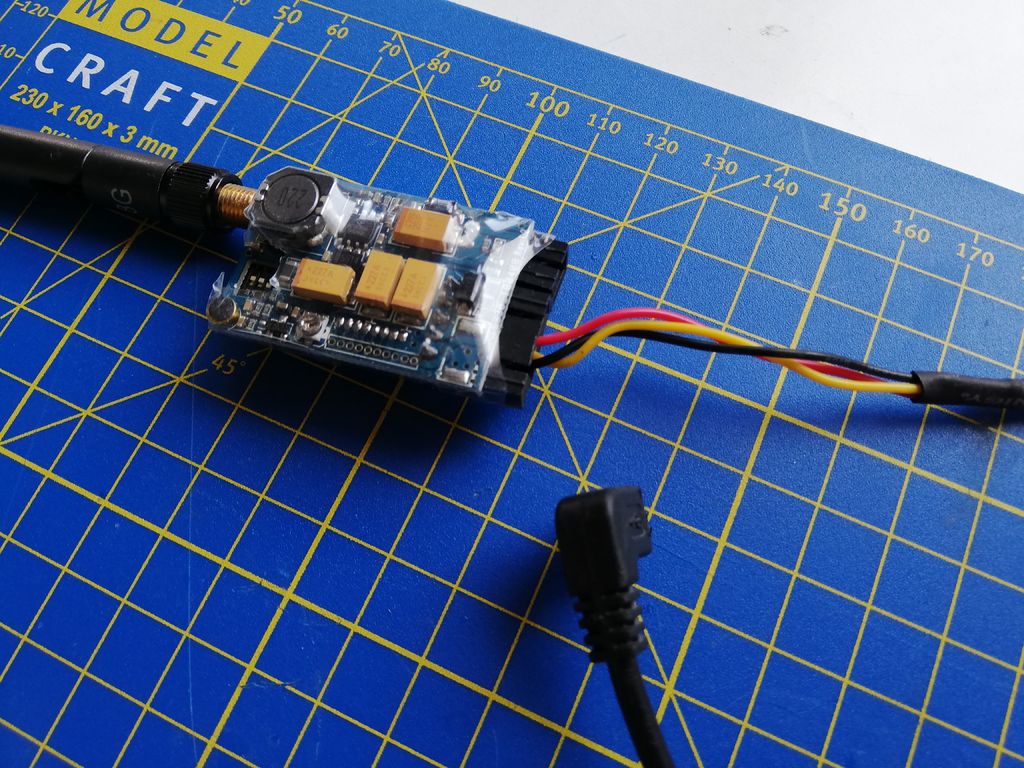
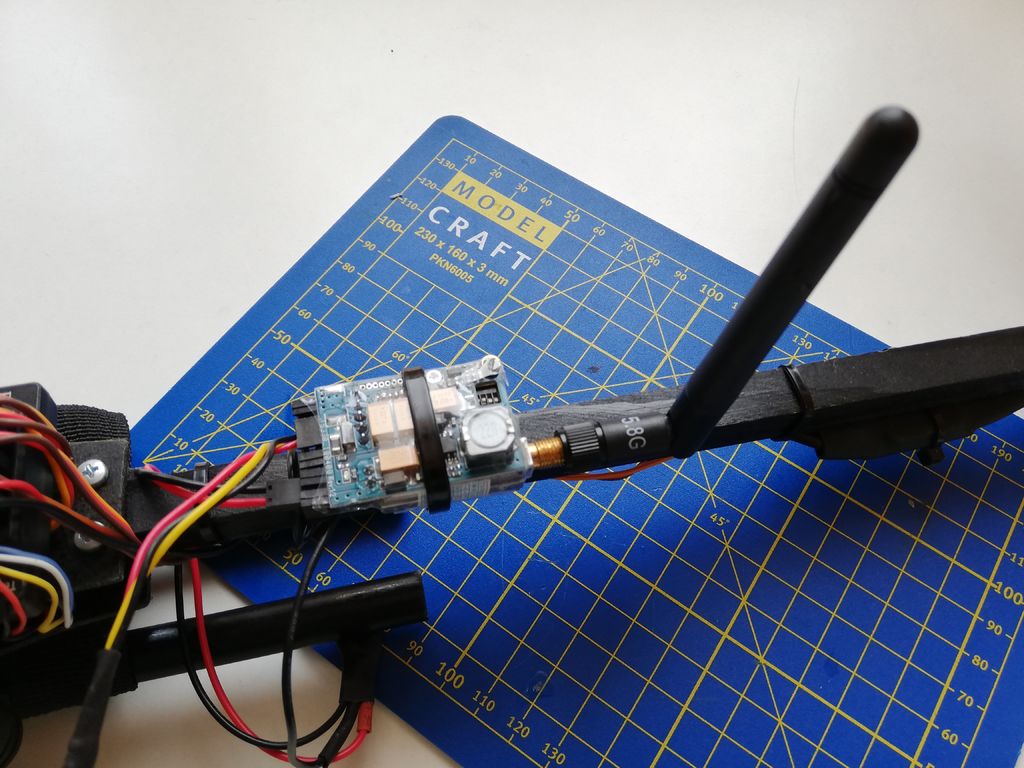


我把这个VTx放在一边,所以安装在直升机的后臂上。这有2000米的范围,但我在测试时没有使用它。只有FPV飞行才能获得乐趣。当我不使用它时,电缆被移除,否则它们被隐藏在框架下面以保持我的构造良好和清洁。
步骤19:进行植物分析



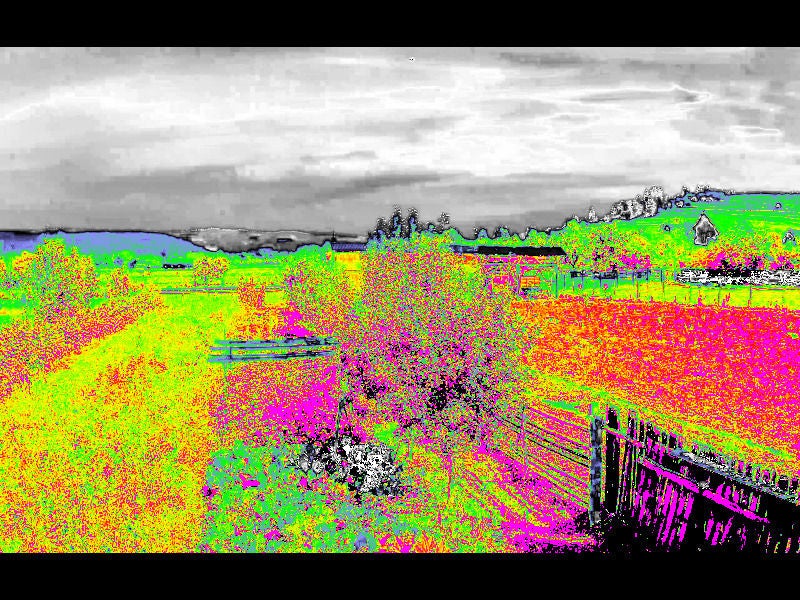

我做了两次25分钟的飞行以进行适当的分析。我们的大多数蔬菜似乎都没问题,土豆需要一些额外的照顾和浇水。几天后去检查它有所帮助。与橙色和粉红色的树木相比,它们在图片上看起来很绿。
我喜欢做圆圈飞行,这样我就可以从各个角度检查植物。你可以清楚地看到,在果树下,一些蔬菜没有得到足够的阳光,这使得它们在NDVI图像中变成蓝色或黑色。如果树的一部分在一天中的某个时间没有获得足够的阳光,那不是问题,但如果整个植物变成黑白,那就不好了。
第20步:安全飞行;)


-
相机
+关注
关注
4文章
1253浏览量
52436 -
无人机
+关注
关注
224文章
9877浏览量
174785
发布评论请先 登录
相关推荐
无人机与反无人机:高空中的智慧较量和“猫鼠游戏”|特信无人机反制
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程
第一集 知语科技无人机反制技术与应用--无人机的定义与分类
知语云智能科技揭秘:无人机威胁如何破解?国家安全新防线!
知语云智能科技无人机防御系统:应对新兴威胁的先锋力量
无人机全景监测:空域管理的新革命
震撼发布!知语云智能科技引领革新,全景反制无人机系统破茧而出!
四旋翼无人机飞行原理【其利天下无人机方案开发】

无人机“炸机”的因素分析
什么是无人机图传系统?无人机图传系统的构成






 工商网监
工商网监
评论