 安全移动机器人的制作
安全移动机器人的制作
第1步:清单零件和材料
我决定使用现成的机箱,通过添加其他组件来稍微修改它。机器人的底盘完全由钢漆成黑色。
机器人的组件:
SZDoit C3智能DIY机器人工具包或4WD智能RC机器人汽车底盘
2x金属开/关按钮
Lipo电池7.4V 5000mAh
Arduino Mega 2560
IR避障传感器x1
大气压力传感器板BMP280(可选)
Lipo电池电压测试仪x2
2x电机驱动器BTS7960B
Lipo电池11.1V 5500mAh
小米1080P全景智能WIFI摄像机
RunCam Split HD fpv摄像机
控制:
RadioLink AT10 II 2.4G 10CH RC发射器或FrSky Taranis X9D Plus
相机预览:
Everyine EV800D护目镜
步骤2:组装机器人机箱
组装机器人底盘非常简单。所有步骤都显示在上面的照片中。主要操作顺序如下:
将直流电机拧到侧面钢型材上
将带有直流电机的侧铝型材拧到底座上
将前后轮廓拧到底座上
安装必要的电源开关和其他电子元件(参见下一节)
步骤3:连接电子零件
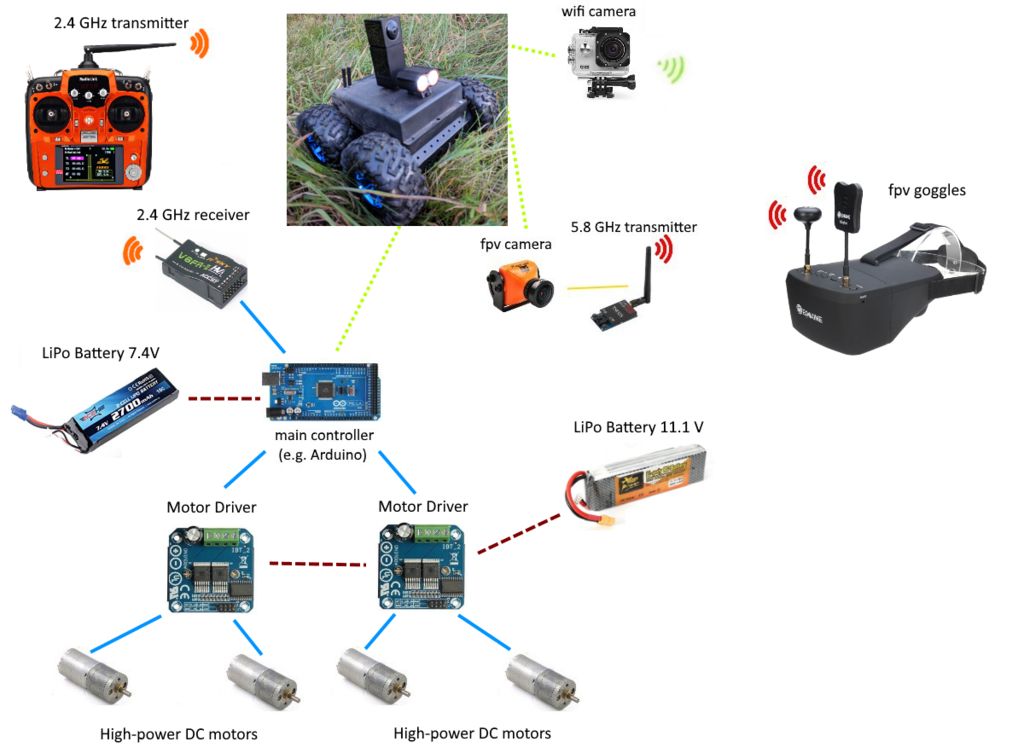

主要这个电子系统中的控制器是Arduino Mega 2560.为了能够控制四个电机,我使用了两个BTS7960B电机驱动器(H-Bridges)。每侧的两个电机连接到一个电机驱动器。每个电机驱动器都可以通过高达43A的电流加载,即使移动机器人在崎岖的地形上移动也能提供足够的功率余量。电子系统配备有两个电源。一个用于提供直流电机和伺服电机(LiPo电池11.1V,5200 mAh),另一个用于提供Arduino,fpv摄像头,led反射器和传感器(LiPo电池7.4V,5000 mAh)。电池已放置在机器人的上部,以便您可以随时快速更换电池。
电子模块的连接如下:
BTS7960 - 》 Arduino Mega 2560
MotorRight_R_EN - 22
MotorRight_L_EN - 23
MotorLeft_R_EN - 26
MotorLeft_L_EN - 27
Rpwm1 - 2
Lpwm1 - 3
Rpwm2 - 4
Lpwm2 - 5
VCC - 5V
GND - GND
R12DS 2.4GHz接收器 - 》 Arduino Mega 2560
ch2 - 7//Aileron
ch3 - 8//电梯
VCC - 5V
GND - GND
在从RadioLink AT10 2.4GHz发射器开始机器人控制之前,您应该先将发射器与R12DS接收器绑定。绑定程序在我的视频中有详细描述。
第4步:Arduino Mega代码

我准备了以下内容示例Arduino程序:
RC 2.4GHz接收机测试
4WD机器人RadioLinkAT10(附件中的文件)
第一个程序“RC 2.4GHz接收器测试“将允许您轻松启动和检查连接到Arduino的2.4 GHz接收器,第二个”RadioLinkAT10“允许控制机器人的移动。在编译和上传示例程序之前,请确保已选择“Arduino Mega 2560”作为目标平台,如上所示(Arduino IDE - 》工具 - 》 Board - 》 Arduino Mega或Mega 2560)。来自RadioLink AT10 2.4 GHz发射器的命令被发送到接收器。接收器的通道2和3分别连接到Arduino数字引脚7和8。在Arduino标准库中,我们可以找到函数“pulseIn()”,它返回脉冲的长度,以微秒为单位。我们将用它来读取接收器的PWM(脉冲宽度调制)信号,该信号与发送器的倾斜度成正比。操纵杆。 pulseIn()函数有三个参数(引脚,值和超时):
pin(int) - 要读取脉冲的引脚编号
value(int) - 要读取的脉冲类型:HIGH或LOW
timeout(int) - 等待脉冲完成的可选微秒数
然后将读取脉冲长度值映射到-255和255之间的值,该值表示向前/向后(“moveValue”)或向右/向左(“turnValue”)速度。因此,例如,如果我们将控制杆完全向前推,我们应该得到“moveValue”= 255并完全推回“getValue”= -255。由于这种类型的控制,我们可以在整个范围内调节机器人的运动速度。
步骤5:安全机器人的测试
-
机器人
+关注
关注
206文章
26965浏览量
201284
发布评论请先 登录
相关推荐
2024年移动机器人行业的十大预测

基于Matlab和VR技术的移动机器人建模及仿真
叉式移动机器人(AGV/AMR)整体解决方案

移动机器人的发展现状及趋势 HMS产品在移动机器人的应用


【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术

【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术

「车型分析」移动机器人控制系统典型应用车型 ——叉式移动机器人(AGV/AMR)

【科普】干货!带你从0了解移动机器人(二)—— 移动机器人硬件组成

【科普】干货!带你从0了解移动机器人(二)—— 移动机器人硬件组成





 工商网监
工商网监
评论