 关于车载网络技术革新-CAN FD深度分析
关于车载网络技术革新-CAN FD深度分析
随着电子、半导体、通讯等行业的快速发展,汽车电子智能化的诉求也越来越强,消费者希望驾驶动力性、舒适性、经济性以及娱乐性更强的汽车。汽车制造商为了提高产品竞争力,将越来越多的电子控制系统加入到汽车控制中,例如ESP(Electronic Stability Program,电子稳定程序)、PEPS(Passive Entry Passive Start无钥匙进入和启动系统)等。但是由于CAN总线的最高传输速率为1Mbit/s(通常汽车CAN系统的实际使用速率最高为500kbit/s),ECU(Electronic Control Unit,电子控制单元)的大量增加使总线负载率急剧增大以致造成网络拥堵,影响信息传输的可靠性和实时性。
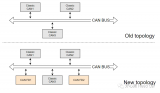
不同的汽车,根据其级别、类型和配置的不同,ECU的数量和网络拓扑都不尽相同。图1所示的网络拓扑为经济型轿车中常见的网络拓扑,因为所有的ECU都在同一个CAN网段上,其总线负载率可能高达50~60%,而一般情况下,CAN总线负载率在30%左右时网络系统的性能相对较好,否则会增大报文延迟、降低系统的扩展性,尤其对于实时性要求较高的安全系统,高负载率甚至可能影响汽车行车安全;另一方面,CAN总线的位填充规则会对CRC(Cyclical Redundancy Check)造成干扰,引起错误帧漏检,使信息传输的可靠性达不到预期的设计要求,因此CAN总线将不能满足日益增长的汽车网络需求。

图1汽车CAN总线网络拓扑
为解决带宽与可靠性的需求,有人提出在汽车网络中使用新的总线协议替代CAN总线,例如安全系统中使用FlexRay总线、娱乐系统中使用MOST总线,但需要重新开发控制器软硬件、重新设计车载网络系统等,这无疑会增加汽车制造商的开发成本,降低其市场竞争力,因此在目前车载网络系统的基础上对CAN总线进行改进显得尤其迫切。
2011年Bosch发布了CAN替代总线--CAN FD (CAN with Flexible Data-Rate) 1.1版。CAN FD比CAN总线的带宽更高,具有与CAN总线相似的控制器接口,这种相似性使ECU供应商不需要对ECU的软件部分做大规模修改,降低了开发难度和成本。CAN FD是CAN总线的升级换代设计,它继承了CAN总线的主要特性,提高了CAN总线的网络通信带宽,改善了错误帧漏检率,同时可以保持网络系统大部分软硬件特别是物理层不变。CAN FD协议充分利用CAN总线的保留位进行判断以及区分不同的帧格式[1]。在现有车载网络中应用CAN FD协议时,需要加入CAN FD控制器,但是CAN FD也可以参与到原来的CAN通信网络中,提高了网络系统的兼容性。
2.CAN FD介绍
引入CAN FD协议,对当前CAN网络系统物理层的改动较小,但是可以明显提高数据的串行通信速率, CAN FD与文献【2】中提到的方法近似,即通过改变帧的格式增加总线带宽:一种方式为加长数据场长度减少报文数量降低总线负载率;另一种方式为缩短位时间提高位速率。
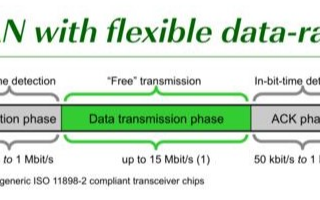
CAN FD在数据帧内部采用两种不同的位速率,即在仲裁段(Arbitration-Phase)采用标准CAN位速率通信,在数据段(Data-Phase)采用高速率通信。
2.1CAN FD的帧格式
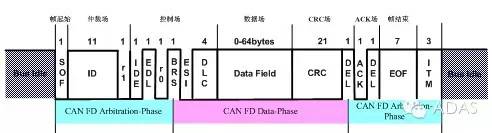
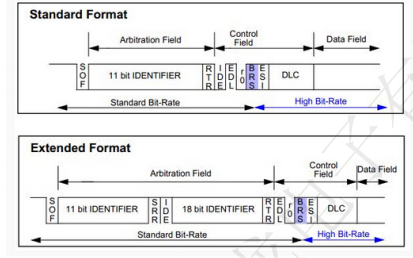
(a)标准帧格式
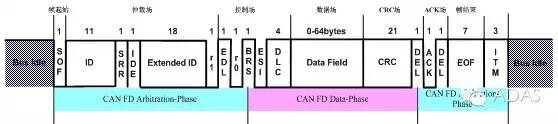
(b)扩展帧格式
数据场数据字节小于16时CRC为17位
图2 CAN FD数据帧格式
对比CAN总线帧格式,CAN FD帧增加或改变了一些位的功能,包括:
◆EDL(Extended Data Length)扩展数据长度,在标准的CAN帧中,控制场包含的保留位被指定为显性位发送,但是在CAN FD帧中,如图2(a)标准帧IDE位之后的保留位或者图2(b)扩展帧中RTR位之后的保留位被定义为EDL并以隐性位发送,EDL主要用于区分标准CAN帧格式和CAN FD的帧格式。由于在CAN FD中EDL总是以隐形位发送,后面的位r0为显性位,因此可在BRS(Bit Rate Switch)位速率开关位之前提供一个重同步沿,这个沿也可用于在收发器延迟补偿中测量收发器的延迟;
◆r1,r0,保留位并以显性位发送,在CAN FD中接收节点忽略r1和r0位的值;
◆BRS(Bit Rate Switch)位速率转换开关,当BRS为显性位时数据段的位速率与仲裁段的位速率一致,当BRS为隐性位时数据段的位速率高于仲裁段的位速率;
◆ESI(Error State Indicator)错误状态指示,主动错误时发送显性位,被动错误时发送隐性位。
CAN FD协议中没有远程帧,标准CAN帧中的RTR位由保留位r1(显性位)替代,因此可将CAN远程帧用于CAN FD系统中。
CAN FD一帧最多可以传输64个字节,因此DLC将重新定义CAN FD的数据长度,值的范围将由原来的0000b~1000b(覆盖8个字节)扩大至0000b~1111b以满足需求,表1所示为DLC数值与字节数的对应关系。
表1 DLC值与字节数对应表

2.2CRC算法
CAN总线通常进行位填充以保持同步,但是位填充会干扰CRC的计算,从而造成错误漏检率达不到设计目标。因为有两种位错误在个别的情况下检测不出来,一种位错误产生位填充条件,另外一种位错误失去位填充条件,这两种位错误都会改变帧位。CAN FD为了避免这种错误,对CRC算法做了改进:将填充位纳入到CRC计算中,即CRC以含填充位的位流进行计算,以一个填充位开始并且序列每4位插入一个填充位加以分割,且填充位的值是上一位的反码。作为格式检查,如果填充位不是上一位的反码,就报错处理。
CAN FD保留了所有的CAN错误界定机制,包括错误帧、错误计数器、主动错误/被动错误状态等。文献【3】中提到相对于标准CAN,CAN FD允许更长的数据场,因此选择两种新BCH型CRC多项式:数据场长度小于16个字节采用g17,数据场长度多于16个字节时采用g21,海明距离HD=6。
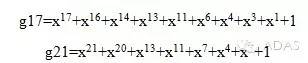
通过帧控制场的EDL位确定帧格式后发送DLC,并从g17、g21以及标准CAN帧多项式中选择正确的多项式计算CRC序列。接收节点也选择相应的多项式计算CRC序列并决定是否对发送帧进行应答。
2.3CAN FD位时间转换
CAN FD有两套位时间配置寄存器,应用于仲裁段的第一套的位时间较长,而应用于数据段的第二套位时间较短。首先对BRS位进行采样,如果显示隐性位,即在BRS采样点转换成较短的位时间机制,并在CRC界定符位的采样点转换回第一套位时间机制。为保证其他节点同步CAN FD选择在采样点进行位时间转换。
2.4收发器延迟补偿
目前应用的CAN收发器存在回路延迟,延迟时间最高可达255ns。CAN FD协议中,帧的数据段位时间有可能小于255ns,如果当采样点到来时发送节点还没有收到其发出的位,发送节点就会报错,因此 CAN FD通过可选择性的收发器延迟补偿机制避免这种情况发生。发送节点将这种补偿机制应用到帧的高速数据段,接收节点不需要收发器延迟补偿。
在收发器延迟补偿机制中,定义一个次级采样点SSP(Second Sample Point)并在接收位的SSP处比发送的位值进行比较检查位错误,同时忽略原来采样点的位值。CAN FD协议控制器在位速率转换之前的EDL位到r0位的下降沿上测量收发器的回路延迟Trv_Delay,延迟Trv_Delay通过计数器测量,起始于CAN_tx的r0下降沿终止于CAN_rx的r0下降沿。
Trv_Delay加上一个可变的偏移量(例如1/2高速位时间)即为SSP的位置。如果SSP发生在发送位发送结束后,那么将发送位缓存等待SSP到达再进行位错误检查。如果在SSP处检测到位错误,那么将这个位错误的信息缓存,直到下一个采样点到达时才对位错误做处理,此时位速率转换回仲裁段的低速率进行数据传输。如果直到CRC界定符的采样点到达都没有检测到位错误,CAN FD协议控制器转换位速率并返回到标准位错误检测模式。
2.5硬件支持
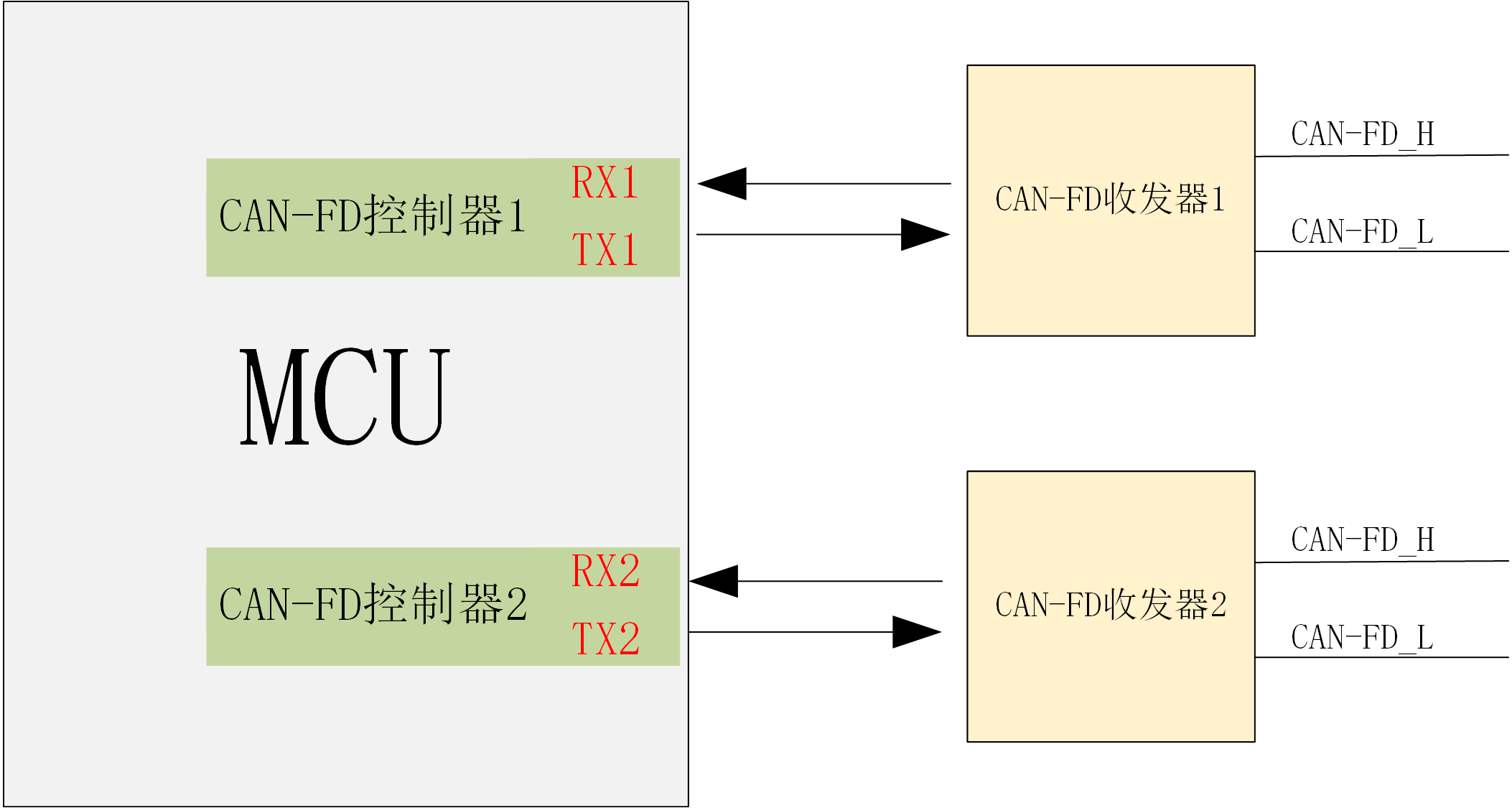
在CAN总线基础上发展起来的CAN FD协议,实际应用时需要对原来的CAN网络物理层做一些改变,对软件和应用程序的修改较小。一般地要在车载CAN网络中进行CAN FD通信时,需要添加CAN FD控制器。目前CAN FD控制器还没有产品问世,Bosch在实验室中将CAN IP模块嵌入FPGA中实现了CAN FD控制器的功能,这种方法目前也主要用于仿真验证和实验室测试。CAN IP模块如图3所示,它由2个CAN FD IP core在FPGA上运行,上层由CPU控制。
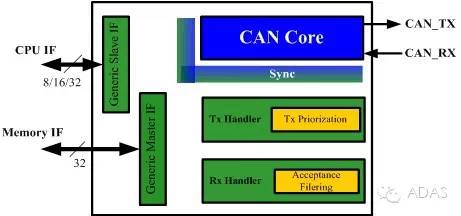
图3 CAN IP Module结构图
NXP宣布将在2013年上半年发布TJA1145 FD收发器的样片,这款收发器支持CAN局部网络(PN, Partial Networking)并且配置了额外的寄存器可以忽略CAN FD消息,这为CAN FD节点和传统的CAN节点兼容于一个网络提供了条件,即CAN FD节点通信时,CAN节点进入睡眠状态,CAN FD通信结束后由一个CAN唤醒消息将CAN节点唤醒。同时NXP宣布将在2013年第三季度发布SJA1145样片,这是一款集成片上收发器的CAN FD协议控制器,支持64个字节的传输负载和2M的传输速率,但是SJA1145需要精确的外部时钟。Etas和Vector等工具厂商也跃跃欲试,发布了其支持CAN FD总线通信的工具及其发展计划。
3.CAN FD应用意义
CAN FD可以有效提高车载网络的数据传输速率,并且保持现有软硬件不做大的改变。图4为Bosch提供的位速率增长曲线,从曲线可以看出当仲裁段的位速率一定时,随着数据段速率的增大数据帧的平均位速率是逐渐增大的,随着帧数据场长度的增加平均位速率也是变大的。当仲裁段位速率选定1Mbit/s、数据场长度为64个字节、数据段的位速率为8Mbit/s时,CAN FD总线的带宽可以提高到5 Mbit/s多,这是相当可观的[4]。
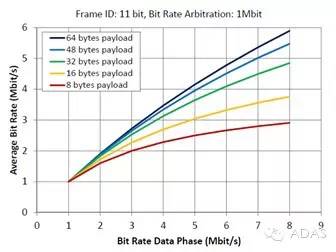
图4 CAN FD数据帧平均位速率
Bosch还提供了一组数据:在软件下载时标准CAN帧速率为500Kbit/s时,传输4个8字节的CAN帧并包括15%的填充位,其在总线上耗时1021μs;而如果传输1个32字节的CAN FD帧并包括15%的填充位其在总线上耗时仅为229μs,节省了3/4的传输时间。同时由于数据场的加长,即使长报文也无需分成多包发送,有利于总线传输层管理。
CAN FD显著提高了车载CAN网络的带宽,更长的数据场长度可以避免使用多包传输。CAN FD的成本与CAN总线基本接近,并且对目前的软件和应用程序改动较小,CAN FD保留了车载CAN网络的物理层和拓扑结构,能够提供CAN总线网络的无缝升级,这些优越性为CAN FD提供了良好的发展前景。
4.结语
CAN FD是一种新协议,它保持了CAN协议的核心特征,并且拥有更高的带宽以及更长的数据长度,CAN FD在车载网络中可以沿用CAN总线的收发器,随着技术的发展也可以采用专用收发器,当采用CAN总线收发器时,其传输速率期望值为2.5 Mbit/s,相当于低速的FlexRay车载网络[5]。目前CAN FD还处于引入阶段,CAN FD通信可以用于特定用途,例如软件下载,此时其他不支持CAN FD的节点就保持睡眠状态。采用CAN FD协议的ECU无需改变应用程序以及CAN物理层便可用于现有网络系统,CAN网络向CAN FD网络过渡是简单方便而且易于实现的。
-
半导体
+关注
关注
327文章
24492浏览量
202046 -
车载网络
+关注
关注
6文章
147浏览量
31419 -
汽车网络
+关注
关注
0文章
51浏览量
14633
发布评论请先 登录
相关推荐
如何实现CAN到CAN FD的升级?
如何解决车载CAN到CAN FD的升级困扰
通信、网络技术会议
【下载】《汽车CAN总线系统原理设计与应用》——车载网络系统研究参考资料
如何利用车载以太网实现以太网与汽车的深度拥抱?
一文浅析汽车CAN-FD总线的通信应用
CAN FD总线技术是什么?与CAN总线技术有何不同之处
CAN到CAN FD快速升级的实现方案
CAN FD网络下的电磁兼容分析
车载CAN-FD的抗扰度评估技术
经典CAN网络加入CAN FD节点需要注意什么?
如何使用DSLogic分析CAN/CAN-FD 信号?






 工商网监
工商网监
评论