SPECT机是在γ照相机的基础上发展起来的核医学影像设备。它的基本构造由探头、旋转运动机架、计算机及其辅助设备等三大部分构成。它的基本工作原理如图6-3所示。关于计算机及其辅助设备等有关内容,将在下一节中讨论。
一、探头部分
1.准直器
准直器是由具有单孔或多孔的铅或铅合金块构成,其孔的几何长度、孔的数量、孔径大小、孔与孔之间的间隔厚度、孔与探头平面之间的角度等依准直器的功能不同而有所差异。由于放射性核素是任意地向各个方向呈立体空间发射γ射线,因而要准确地探测γ光子的空间位置分布,就必须使用准直器。它安装在探头的最外层,其作用是让一定视野范围内的一定角度方向上的γ射线通过准直器小孔进入晶体,而视野外的与准直器孔角不符的射线则被准直器所屏蔽,也就是起到空间定位选择器的作用。
准直器最基本的性能指标是灵敏度和分辨率。所谓准直器灵敏度是指准直器接收来自放射源的放射线的能力。所谓准直器分辨率(空间分辨率)是指准直器探头鉴别两个紧密相连的放射源的能力,目前多用点源或线源响应曲线最大高度的一半处的全宽度即FWHM(full width at half maximun)表示。分辨率越好,FWHM越小。灵敏度和分辨率呈相反的关系。要求有较高的灵敏度,往往要以牺牲分辨率为代价,反之亦然。准直器的设计就是在灵敏度和分辨率之间选择最佳的折衷匹配。因此,它是SPECT影像装置的关键部件。准直器的性能是直接影响系统性能的主要因素。准直器的另外一项性能指标是间壁穿透率,它反映准直器小孔之间的间壁屏蔽视野外的与准直器孔角不符的射线的能力,一般要求穿透率≤10%。如果间壁太厚,探测几何效率将会降低;如果太薄,将使影像对比度降你低。
按准直器的形态结构来区分,准直器有以下几种:

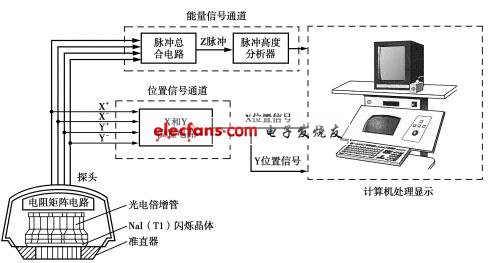
图6-3 SPECT的基本构造和工作原理示意图
(1)平行孔准直器 最常用的一类准直器。它是由一组垂直于晶体表面的铅孔组成。每个孔仅接收来自它正前方的射线,而防止其他方向上的射线射入晶体。最接近准直器处的空间分辨率最好,随距离的增加而变差,而灵敏度随距离的增加却变化不大,因γ光子的空间浓度虽随距离的平方成反比而减少,但晶体暴露于放射源的总面积却按距离的平方成正比而增加。平行孔准直器的性能由其孔数、孔径、孔长、间壁厚度和准直器的材料所决定。根据准直器适用的γ光子的能量范围,可将平行孔准直器分为低能(≤150keV)、中能(150~350keV)和高能(≥350keV)3种。根据低能准直器的灵敏度和分辨率可将平行孔准直器分为低能通用型、低能高分辨率、低能高灵敏度3种。孔径越小,分辨率越好;间壁厚度减少,灵敏度增加。影像大小与靶器和准直器之间的距离无关。
(2)针孔准直器 它是单孔准直器,其成像原理与光学中的小孔成像原理相同,像与实物的方向相反。成像的大小与被检物距离针孔的远近有关,距离越近,成像越大。其分辨率和灵敏度与其孔径的大小有关,孔径增大,灵敏度提高,分辨率降低,反之亦然。
(3)发散孔准直器 其优点是扩大有效视野10%~20%,且视野随放射源与准直器距离的增加而增大。其缺点是灵敏度和分辨率较平行孔准直器差。且随放射源与准直器距离的增加而变坏。利用这种准直器,被测物被缩小,但并不是所有的部分都受到相应的缩小,故产生影像畸变。
(4)聚焦孔准直器 其优点是可以提高灵敏度和分辨率,但也容易出现影像的畸变。主要适用于总计数时间受限的动态研究。
2.晶体
晶体的作用是将γ射线转化为荧光光子。γ射线进入晶体后,与之发生相互作用,闪烁晶体吸收带电粒子的能量使原子、分子激发,受激发的原子、分子在退激时发射荧光光子,荧光光子的数目、能量、输出的光脉冲幅度与入射γ射线的能量成正比,入射γ射线的能量越小,所产生的光子能量越小,输出的光脉冲幅度也越小,反之亦然。利用光导、光反射物质和光藕合剂将荧光光子尽可能收集到光电倍增管的光阴极上,由于光电效应,光子在光阴极上打出光电子。
目前,大多数SPECT机均采用大直径的碘化钠(铊激活)晶体。NaI(Tl)晶体是含有约0.1%铊的碘化钠单晶体。它的发光效率很高,其最强发射光谱波长为4150nm左右,能与光电倍增管的光谱响应较好匹配,晶体透明度也很好。NaI晶体的密度较大,ρ=3.67g/cm3,有效原子序数高达50,所以对γ射线的探测效率特别高。但它的主要缺点是容易潮解,必须在密封条件下保存和使用,而且质脆,容易碎裂,故使用时应避免大的震动和温度的较大变化,一般室内温度要严格控制在15~30℃之间,每小时温差不超过3℃。
晶体位于准直器和光电倍增管之间。其准直器侧面(入射面)采用铝板密封,既能透过γ射线,又能遮光;其光电倍增管侧面(发光面)用光导玻璃密封,晶体内所产生的闪烁光子能顺利地进入光电倍增管。晶体有不同规格的大小和厚度。圆形晶体的直径一般为28~41cm,方形和矩形大视野晶体在SPECT机中也广为使用。晶体厚度不仅影响SPECT机的灵敏度和空间分辨率,同时也限定了它所接受射线的能量范围。目前常用的晶体厚度为6.4~12.5cm。一般薄晶体接受的能量偏低,而厚晶体接受的能量则偏高。薄晶体在SPECT机中使用越来越普遍。它可以提高SPECT机的固有分辨率。最理想的状况是γ射线进入晶体只经过一次相互作用就以闪烁光形式发射出来,这样产生的闪烁点定位准确,分辨率好。但实际情况并非如此,γ射线进入晶体后经过多次相互作用才被光电倍增管所探测,这种闪烁点定位不精确,空间分辨率模糊。对于99Tcm和201Tl等低能放射性核素,大部分γ射线与晶体的相互作用发生在晶体的入射面(靠近准直器)的2~5mm内。对此,如果应用厚晶体,不仅对灵敏度没有明显改善,而且明显降低了空间分辨率。例如,把晶体厚度从12.5mm降至6.5mm,空间分辨率可以提高70%,相应的灵敏度仅损失15%。目前大部分的SPECT机均采用9.4mm厚的晶体,以获得空间分辨率与灵敏度之间较好的匹配。
3.光导
光导是装在晶体和光电倍增管之间的薄层有机玻璃片或光学玻璃片,其作用是把呈六角形排列的光电倍增管通过光藕合剂(一般为硅脂)与NaI(Tl)晶体藕合,把晶体受γ射线照射后产生的闪烁光子有效地传送到光电倍增管的光阴极上。光导有多种形状,一般其下底面为六角形,紧密地排列在晶体之上;上顶面为圆形,与光电倍增管紧密贴合。这样,当应用圆形光电倍增管时,射入光电倍增管之间间隙内的闪烁光便不会损失。此外,光导的侧面涂有对荧光反射性能良好的氧化镁涂剂,以便让更多的闪烁光进入光电倍增管,也可以防止光线从光导的侧面透射到其他光电倍增管的光阴极上。再者,在晶体和光导、光导和光电倍增管之间都充填有光学硅脂,以排除空气,减少闪烁光透过两种光介面时的损失。光导从每次荧光事件中收集闪烁光的能力和正确地把它分配到光电倍增管的能力,影响着SPECT机的空间分辨率、线性度、均匀性和灵敏度。因此,上述措施对提高整机的性能是很重要的。一般说来,薄的光导提供较好的分辨率,而厚的光导则提供较好的均匀性。
4.光电倍增管(PMT)
光电倍增管是在光电管的基础上发展起来的一种光电转换器件,它的作用是将微弱的光信号(闪烁晶体在射线作用下发出的荧光光子)按比例转换成电子并倍增放大成易于测量的电信号,其放大倍数可高达106~109。光电倍增管主要由光阴极、多级倍增极、电子收集极(阳极)组成,整个系统密封在抽成真空状态的玻璃壳内。光电倍增管的工作原理如图6-4所示。
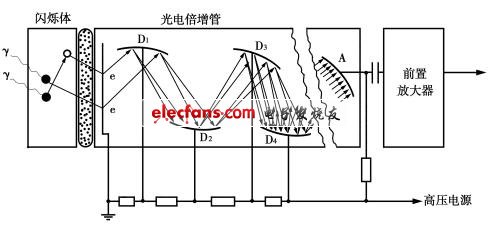
图6-4 光电倍增管的工作原理
射线在晶体中引起的闪烁光打在光阴极上,通过光电效应产生一定数目的光电子。由于光阴极和各级倍增极之间都加有电压(高压电源经分压电阻R供给),使阴极产生的电子被有效地放大并集中到下一极,最后在阳极形成很大的电子流,通过负载电阻RL即得到易于测量的电压脉冲。此过程产生的电流量与入射在光阴极上的光子数目成正比。因此,输出的脉冲幅度与射线在闪烁体中的能量损失成正比。
目前,圆探头的SPECT机使用光电倍增管一般为37~91个,方形或矩形探头的SPECT机使用光电倍增管一般为55~96个。光电倍增管的形状有圆形和六角形两种。圆形晶体一般通过六角形的光导与晶体紧密相贴。六角形的光电倍增管是圆形光电倍增管的最新改进型,其主要优点是去除光导,直接与晶体相贴,消除探测间隙,提高灵敏度和空间分辨率。这种光电倍增管已经逐渐取代圆形光电倍增管和光导。光电倍增管在探头中呈蜂窝状排列。整体光电倍增管的性能稳定性取决于各个光电倍增管的性能参数是否一致、各个光电倍增管的工作电压是否稳定以及是否有足够长的预热时间,它们直接影响着系统的均匀性、分辨率和线性度。对光电倍增管性能影响最大的是直流高压的稳定性。而高压又是由低压交流电经整流升压获得的,所以SPECT机都要求有稳压电源。在经常停电的地方,还要配备不间断供电电源(UPS),以保证SPECT机的稳定性和工作的连续性。
5.模拟定位计算电路
此电路与光电倍增管相连接。其主要作用是将光电倍增管输出的电脉冲信号转换为确定晶体闪烁点位置的X、Y信号和确定入射γ射线的能量信号。模拟定位计算电路一般可分为两类:一类是最常用的Anger型,即加权电阻矩阵网络型;另一类是延迟线时间转换型,此型实际上是前者的改进型。模拟定位计算电路接受来自光电倍增管的电信号,在此转换成具有一定特征的脉冲信号。这些信号的某个物理量(电压或时间)与晶体闪烁点的位置座标成一定的对应关系。Anger型模拟定位计算电路系将闪烁点的位置座标转换为脉冲幅度与之对应的信号;延迟线时间转换型系将闪烁点的位置座标转换为过零时间与之对应的双极脉冲信号。现以Anger型模拟定位原理为例介绍如下(图6-5):
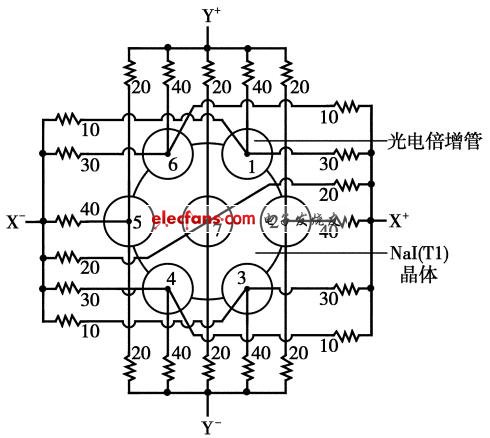
图6-5 Anger型模拟定位计算电路的工作原理
图6-5是Anger型模拟定位计算电路工作原理简图。图中7只光电倍增管按六角形排列,每个光电倍增管通过加权电阻与X+、X-、Y+、Y-4根输出导线连接。当闪烁事件在晶体内发生时,闪烁光便从闪烁点位置向四周发射。最靠近闪烁点的光电倍增管接受的光量最多,距离越远,接受的光量也就越少。通过计算每个光电倍增管4个输出脉冲信号的相对大小,便可确定γ射线在晶体中相互作用的位置。然后,这4个输出脉冲信号被送进前置放大电路和Z信号合成电路,以减少脉冲波形畸变和传输失真,以及确定在此闪烁事件中晶体吸收的总能量并输出能量信号Z脉冲。Z脉冲信号被送进数字式多道脉冲高度分析器进行能量鉴别,以确定此闪烁事件是否为有效闪烁事件。
二、机架部分
SPECT的机架部分由机械运动组件、机架运动控制电路、电源保障系统、机架操纵器及其运动状态显示器等组成。它的主要功能是:①根据操作控制命令,完成不同采集条件所需要的各种运动功能,如直线全身扫描运动、圆周断层扫描运动、预置定位运动等;②把心电R波触发信号以及探头的位置信号、角度信号等通过模数转换器(ADC)传输给计算机,并接受计算机指令进行各种动作;③保障整个系统(探头、机架、计算机及其辅助设备等)的供电,提供稳压的各种规格的高低压、交直流电源。限于篇幅,本章仅介绍机架运动及其控制系统。
前面已经讲过,γ照相机型的SPECT机兼有四大功能:平面显像、动态研究、全身扫描和断层采集。尤其是全身扫描和断层采集,这两种显像方式是在探头和机架的运动过程中完成数据采集的,因此需要有高精度和良好稳定性的运动系统和定位系统,这也是SPECT质量控制的关键之一。
机架运动按其运动形式分为4种:①整体机架直线运动(whole body),此时探头处0°或180°,机架沿导轨作直线运动,检查床与导轨平行,主要适用于全身扫描;②探头及其悬臂以支架机械旋转轴为圆心,作顺时针或逆时针圆周运动,检查床与导轨垂直,主要适用于断层采集,此时探头倾斜度必须为0°;③探头及其悬臂沿圆周运动半径作向心或离心直线运动,主要作用是使探头在采集数据时尽可能贴近病人;④探头沿自身中轴作顺时针和逆时针倾斜或直立运动,主要适用于静态或动态显像时特殊体位的数据采集。在实际工作中,往往是①、③或②、③联合运动,这就是所谓的“贴身轨道”法全身扫描或断层采集,以提高探测效率和空间分辨率,但由于机架的多种运动使得数据采集总时间稍有延长。
机架运动按其控制方式分为手动控制和自动运行2种。手动控制主要适用于:①数据采集前,根据检查部位、体位、倾斜角、旋转角等要求,把探头运动到指定位置;②在全身或断层扫描前,必须将预定探头运动轨迹的数据输入计算机控制系统。如椭圆断层轨道的预置四点距旋转中心的最近点的定位;检查床的高度定位;预定全身扫描的起始位置等。自动运行主要适用于全身或断层采集,根据预置运动条件(起始角度和位置、旋转的总角度和运行的总距离等),在计算机的控制下自动运行并同时采集每个角度和位置上的投影数据。
探头及机架的各种运动方式和速度受机架内定位控制系统的控制。定位控制系统主要由3部分组成:①驱动马达控制电路;②位置信息存储器;③定位处理器。定位处理器实际上是一个微型计算机,它的主要作用是控制探头及机架转动的角度、移动的距离及识别位置。定位处理器受主计算机的控制,并将各种定位数据传输给主计算机。
在主计算机的只读存储器(ROM)中有一组标准的位置编码。每次开机后,主计算机把标准位置编码传输给机架定位处理器,并储存在定位存储器中。在机架内,每种方式的机械运动其正反两个极限位置均装有极限脉冲发生器,当运动滑块触及此脉冲器,即发出停止运动脉冲。在每个驱动马达的后部都装配有同轴运动脉冲发生器,只要马达转子每转动一周,脉冲发生器就发出一个或数个标准脉冲。机架定位处理器把接受的脉冲数与存储器中相应的位置编码相比较,以确定自身的位置。
为了保证断层扫描和全身扫描运动时,探头转动角度和机架移动距离的精确度,在每次开机后、紧急停止运动后或机架运动出错后,都要利用计算机机架位置检测和校正程序,首先进行机架位置自我检测。当自检失败时,都要重新进行机架位置设定,即重新确定各种运动方式的标准脉冲参数。标准参数有3个:角度参数、距离参数和高度参数。手动控制完成以下3个过程并加以确认:①机架或探头旋转180°和360°;②直线移动机架100cm;③将探头和检查床分别调到最高点和最低点,并确认当探头处于180°最低位和最高位时,检查床的最低高度和最高高度,即可建立3个标准参数。然后,再控制机架作各种运动直至运动到正反两个极限,直到限位脉冲器发出停止脉冲为止。这样,计算机通过计算上述平移或旋转单位距离或角度时,同轴运动脉冲发生器所发出的脉冲数,并以此为标准计算运动到正反极限的总脉冲数,即可计算出全程移动的距离或旋转的角度。