CT机种类繁多,结构各异,但其工作原理都是一致的。目前市场上流行的CT机大部分是第3代CT机。近年来,第4代CT机、螺旋CT机已经大批上市,第3代CT机大有被淘汰的趋势。下面简单介绍第3代CT机的基本结构.
一、CT机的构成
第3代CT机的组成模型如图3-14所示。
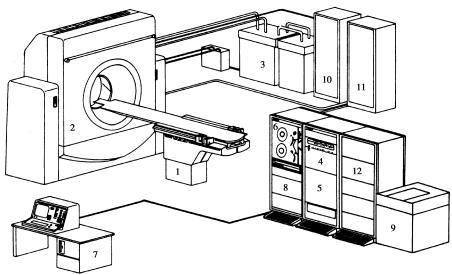
图3-14 第3代CT机组成模型
(1)扫描床 扫描床是完成扫描任务的运载被检者的工具,具有垂直运动控制系统和水平纵向运动控制系统,它能按程序的要求实现自动进出扫描架孔径,完成自动定位检测对象的扫描位置。
(2)扫描架 扫描架是CT机的重要组成部分,上面装有X线球管、滤线器、 准直器、参考探测器、探测器及各种电子线路,扫描架能做旋转、前后倾斜运动,运动角度可达±20°~±30°,具有几何放大功能的扫描架还可以作直线运动,以改变球管和扫描物体之间的距离。
(3)高压发生器 它为X线球管提供正常工作电压(±80 kV)和球管灯丝工作电流。
(4)计算机系统 是CT机的心脏,是产生扫描运动、处理数据、重建影像的控制中心。
(5)操作台 控制整机电源通断,输入工作指令,拷贝扫描数据,根据诊断要求对影像进行各种技术处理,例如放大、病灶体积测量、三维成像等。
(6)照相机 作扫描机的最后输出终端,扫描数据以胶片作为永久保存的方式。
(7)其他 包括大磁盘系统、磁带机、软盘驱动器、光盘驱动机等.
二、电路系统
1.整机供电系统
CT机整机供电原理如图3-15所示。

图3-15 第3代CT整机电源分配图
三相380V市电经主 电源开关引入电源配电柜后,进入电源变压器,主电源变压器采用星形接法,每相绕组有5个抽头,分别接至5个交流接触器的触点,根据输入三相市电的波动情况,驱动相应的交流 接触器工作,以接通相应的触点和抽头,使市电波动在+6%~-5%范围内时,确保系统供电电压稳定在380V的水平上。稳定后的电压再通过自动断路器馈送给各子系统。
2.系统接地
CT机采用三相五线制供电,除三相主电源外,还有三相星形连接的中线和地线,该机地线用专用线引至配电房三相中点接点上,不另铺设地线.在用仪器对CT机进行检修时,所有使用仪器,不得另行接地。
3.扫描架电路
扫描架的运动,包括机架的旋转,倾斜角度,几何放大,控制光栅开口的大小,扫描床上、下、前、后运动。这些运动首先由计算机发出运动指令,由控制电路控制电机的运转,通过减速机构,完成上述各种运动。为了使运动速度稳定,电机轴装有测速发电机,输出信号反馈至控制电路。

图3-16 扫描架电路方框图
为了防止因故障而损坏电气和机械部件,机架电路中设有保护电路和误差指示电路,一旦某一运动部分出现故障,立即切断相应的供电电源。
4.探测器电路
探测器电路主要是提供一系列的直流电源:+450V、±15V、±5V,这些电源分别加给电离室、前置放大器和数/模转换电路。
5.高压发生器电路
高压发生器电路方框图见图3-17。

图3-17 高压发生电路方框图
三相380V市电经主电源变压器调整后直接输入到三相高压变压器原边,原边采用星形接法。副边分2组,一组是三角形接法,一组是星形接法。三角形接法一组输出经三相桥式整流后产生+80kV;星形接法的一组输出经三相桥式整流后产生-80kV。正、负高压经四极管控制后分别加至球管正、负极上,高压高达160kV。
6.灯丝控制电路
球管灯丝控制电路如图3-18所示。

图3-18 球管灯丝电路方框图
灯丝控制电路主要是在给定高压、给定焦点的条件下,计算并产生期望的阳极电流。功能发生器的作用是在一定的高压下通过特定的函数使阳极电流Ia 表示成灯丝电流If 的函数。为此,必须为功能发生器提供阳极电压和期望阳极电流2个参数。据此,功能发生器产生3个输出信号:①阳极电流Ia=F(If),恒定高压为70 kV;②70 kV线相对于非70 kV线的平行移位;③70 kV线移位后进行斜率校正。以上3个信号迭加后,产生一定的电压,该 电压1V对应于灯丝电流If=1A。
灯丝电流处理器分别接收灯丝电流和灯丝电压的反馈信号。如果只接收灯丝电流信号,该电路就成为灯丝电流的恒流控制电路。当灯丝阻抗增加时,球管的阳极电流也增加。灯丝消耗功率P=。随着R的增加,功率消耗线性上升,灯丝温度上升,使阳极电流增加;如果灯丝电流处理器只接收灯丝电压反馈信号,该电路就成为灯丝电压稳压器,当灯丝电阻增加时,灯丝消耗功率P(=U2/R)反而会下降,同时引起灯丝温度下降,使阳极电流下降。而灯丝电流处理器既接收灯丝电压反馈信号,又接收灯丝电流反馈信号,它们的比例分别是75%和25%,结果达到控制灯丝电流的目的。
球管在实际工作时,通过测量球管阳极电流,并将实际测量值与期望的阳极电流进行比较,比较结果送到控制器2。进一步调整灯丝电流,使实际测量的阳极电流等于期望的阳极电流值。
7.计算机系统电路
计算机系统方框图见图3-19。

图3-19 计算机系统方框图
计算机的主要功能是控制扫描器进行扫描运动,收集并处理扫描数据,重建影像,显示结果。
扫描器的扫描运动主要是控制机器的旋转、倾斜,扫描床运动,控制机械、电气、温度偏差不超过规定的范围。
数据采集主要是指将收集到的来自探测器系列的扫描数据,进行模/数转换,存储到磁盘中 。
影像重建包括从磁盘中调出原始数据送到阵列处理器,很快确定被扫描对象断层上各像素的衰减值,它具有很强的运算功能,然后再把这些信息存储到磁盘中,以备调用.
影像重建电路方框图见图3-20。
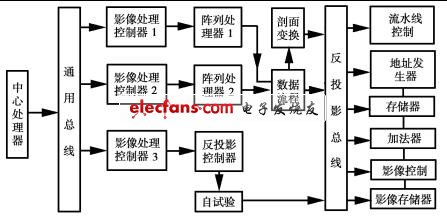
图3-20 影像重建电路方框图
阵列处理器是高速算术运算器。反投影处理器的主要功能就是在反向涂抹原始扫描数据进入影像处理器时,对应某一个扫描物体断层中的像素Px,找出哪些数据应该影响该像素及其加权系数,加权系数取决于距离旋转中心的距离。反投影控制器用来完成对反投影的控制作用。它是专用微处理器,并具有专门的硬件,如快速总线、接口控制、存储器和地址发生器。
剖面变换器是把来自阵列处理器的数据进行内插处理,并计算逐次内插和变换数据之间 的差异,传送到剖面存储器。
地址发生器用于定位数据,产生加权系数。
三、扫描过程及影像的产生
扫描过程及影像产生过程方框图见图3-21。
1.机架旋转准备工作就绪后,按下曝光键,旋转马达驱动扫 描架从起始位置(-44°)进入加速旋转状态,直到球管通过0°位置,扫描达到正常转速。从0°到360°位置,旋转速度恒定不变。360°位置以后,扫描架减速运行,直到404°位置,扫描架停止旋转。在扫描架以恒速旋转过程中,旋转马达通过齿轮系统驱动位置编码器,机架每旋转0.6°产生一个位置脉冲,旋转1周共产生600个位置脉冲。每一个脉冲激发1次高压发生器,使球管发射X线,产生1个测量剖面。每个剖面包含有576个探测器的测量数据,这就是后来重建影像时的原始数据。
2.高压发生器
扫描架在旋转过程中所产生的位置脉冲经光电耦合电路传输到高压发生器单元,以脉冲的上升沿为起点,高压发生器送出一个定时信号到四极管箱,该信号处于高电平时,四极管箱产生高压脉冲。定时信号也同时被送到探测器电路。
3. 球管
当高压加到球管正、负极时,就发射X线,管电流强度取决于管子的型式、千伏数(电压)和球管的灯丝温度。
4.滤线器
球管发射的X线,首先通过滤线器(由一些铜片、铝片组成)。 计算机根据扫描参数进行选择。X线通过滤线器后,接着通过线束整形器,其形状是中间薄、边缘厚,用以补偿一般扫描物体中间厚、边缘薄的现象。
5.光栅
X线是由光栅进行准直的。光栅在计算机的控制下,控制开口宽度,以便给出所要求的扫描厚度。

图3-21 扫描过程及影像产生过程方框图
6.参考探测器
由光栅开口处穿出的X线被参考探测器接收。参考探测器被密封在一个约一个大气压的密封仓里。在X线作用期间,参考探测器产生一定的信号输出,该信号对应于入射组织的X线的初始强度。
7.扫描物体
每一束X线以一定的角度和位置穿过扫描物体进入阵列探测器室,扫描物体的每一点都受到大量X线的影响。影像重建的反投影过程恰恰是利用了这一事 实而得到最后的影像。因此,球管和探测器必须准确地对准到与扫描平面相平行的程度。否则,无法产生准确真实的影像。
8.阵列探测器
阵列探测器被密封在一个大约20个大气压的密封仓里,里 面充满氙气,每个氙气原子含有大量的电子(54个),这些电子在受到X线光子的轰击时,很容易形成自由电子。由于氙气的密度大,仓内压力又高,大部分X线能量被氙气所吸收,气体的电离量取决于X线的强度。
探测器是用577个平行板隔成576个小室,这些平行排列的板所形成的小室恰好指向X线球管 的焦点。这些平行板的一半被联结到前置放大器的输入端,另一半被联结到450 V电源上,如图3-22所示。

图3-22 探测器室联结及前至放大器
当氙气分子被X线光子轰击电离时,在高压作用下,便产生一定的电流。电流强度随入射的X线能量而变化,最大电流为1.4×10-6 A,最小电流只有10-12 A。
9.前置放大器
前置放大器共有576个通道,接收来自探测器的微小电流。参考探测器有独立的前置放大器。这些微弱的电流经高增益放大器进行积分,积分时间大约是4ms,前置放大器的输出幅度可从几毫伏到10V。再经模/数转换后,变成二进制16位数字量。这就是原始数据,经光电耦合传输到计算机,并存储到磁盘中。
10.影像重建
这个过程可分成3个阶段:
第1阶段是把原始数据进行偏置校正,把576个16位字分别减去对应无X线时的测量数据,测量值以毫伏(mV)为单位。毫伏数高表示低吸收系数,毫伏数低表示高吸收系数。但是没有办法区别1cm厚的骨和10cm厚的脂肪之间的吸收系数不同。因为在此情况下,两种条件吸收X线的量可能是完全相同的。为了克服这一问题,引入了预处理过程。在这一过程中,把原始数据转换成mμ-d值。它表示探测器的输出既受吸收系数mμ又受物体厚度d的影响,这一过程是由工厂定标来完成的。
第2阶段就是进行褶积滤波,确定校正函数。
第3阶段就是进行反投影。因为每一条X线通过一定的扫描物体像素,反投影系统能准确地确定每个像素受到哪些X线的影响。
反投影的输出称为影像数据,以单位H来表示。高H值表示高密度,低H值表示低密度。反投 影过程实质上是从mμ-d中分离出mμ(吸收系数)值来。再现了扫描物体的吸收系数。