8.1.1GPS网技术设计的依据
1.GPS测量规范(规程)
(1)《全球定位系统(GPS)测量规范》
(2)《全球定位系统城市测量技术规程》
(3)各行业部门的其他GPS测量规程或细则
2.测量任务书
8.1.2GPS网的精度, 密度设计
1.GPS测量精度标准及分类
(1)GPS测量精度分类
对于各类GPS网的精度设计主要取决于网的用途。用于地壳形变及国家基本大地测量的GPS控制网可按表8-1分级。
表8-1 GPS测量精度分级(一)
|
级别 |
主要用途 |
固定误差a(mm) |
比例误差b(mm) |
|
A |
地壳形变测量或国家高精度GPS网建立 |
≤5 |
≤0.1 |
|
B |
国家基本控制测 量 |
≤8 |
≤1 |
用于城市或工程的GPS控制网可按表8-2分级。
表8-2 GPS测量精度分级(二)
|
等级 |
平均距离(km) |
a(mm) |
b(mm) |
最弱边相对中误差 |
|
二 |
9 |
≤10 |
≤2 |
1/12万 |
|
三 |
5 |
≤10 |
≤5 |
1/8万 |
|
四 |
2 |
≤10 |
≤10 |
1/4.5万 |
|
一级 |
1 |
≤10 |
≤10 |
1/2万 |
|
二级 |
1 |
≤15 |
≤20 |
1/1万 |
(2)GPS测量的精度标准
GPS测量的精度标准通常用网中相邻点之间的距离中误差表示,其形式为:

式中:σ——距离中误差(毫米);
ɑ——固定误差(mm);
b——比例误差系数(ppm);
d——相邻点之间的距离(km)。
实际生产中,应根据测区大小、GPS网的用途,来设计网的等级和精度标准。
2.GPS点的密度标准
制定GPS网的密度标准,主要考虑任务要求和服务对象。密度可参照表8-3的规定执行。
表8-3 GPS网中相邻点间距离 (单位:km)
|
级别 项目 |
A |
B |
C |
D |
E |
|
相邻点最小距 |
100 |
15 |
5 |
2 |
1 |
|
相邻点最大距 |
2000 |
250 |
40 |
15 |
10 |
|
相邻点平均距 |
300 |
70 |
15~10 |
10~5 |
5~2 |
8.1.3GPS网的基准设计
1.基准设计的定义:
在GPS网的技术设计中,必须明确GPS网的成果所采用的
坐标系统和起算数据的工作,称为GPS网的基准设计。GPS网的基准包括位置基准、方位基准和尺度基准。
2.基准设计应考虑的几个问题:
(1)应在地面坐标系中选定起算数据和联测原有地方控制点若干个,用以转换坐标。
(2)对GPS网内重合的高等级国家点或原城市等级控制点,除未知点连结图形观测外,对它们也要适当地构成长边图形。
(3)联测的高程点需均匀分布于网中,对丘陵或山区联测高程点应按高程拟合曲面的要求进行布设。
(4)新建GPS网的坐标应尽可能与测区过去采用的坐标一致。
8.1.4 GPS网构成的几个基本概念及网特征条件
1.GPS网图形构成的几个基本概念
观测时断:测站上开始接收卫星信号到观测停止,连续工作的时间段,简称时段。
同步观测:两台或两台以上接收机同时对同一组卫星进行的观测。
同步观测环:三台或三台以上接收机同步观测获得的基线向量所构成的闭合环,简称同步环。
独立观测环:由独立观测所获得的基线向量构成的闭合环,简称独立环。
异步观测环:在构成多边形环路的所有基线向量中,只要有非同步观测基线向量,则该多边形环路叫异步观测环,简称异步环。
独立基线:对于N台GPS接收机的同步观测环,有J条同步观测基线,其中独立基线数为N-1。
非独立基线:除独立基线外的其它基线叫非独立基线,总基线数与独立基线之差即为非独立基线数。
2.GPS网特征条件的计算

3.GPS网同步图形构成及独立边的选择
根据(8-3)式, 对于由N台GPS接收机构成的同步图形中一个时断包含的GPS基线数为:

但其中仅有N-1条是独立的GPS边,其余为非独立边。当接收机数N=2~5时所构成的同步图形见图8-1。

对应于图8-1的独立GPS边可以有如图8-2所示的不同选择。

当同步观测的GPS接收机数N≥3时,同步闭合环的最少数应为:

N与J、T的关系见下表:
表8-4 N与J、T的关系表
|
N |
2 |
3 |
4 |
5 |
6 |
|
J |
1 |
3 |
6 |
10 |
15 |
|
T |
0 |
1 |
3 |
6 |
10 |
8.1.5 GPS网的图形设计
1.GPS网的图形设计
根据对所布设的GPS网的精度要求和其它方面的要求,设计出独立的GPS边构成的多边形网,称为GPS网的图形设计。
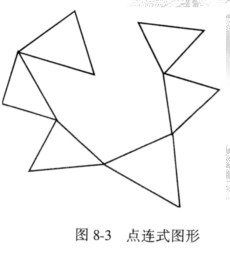
2.GPS网的图形
(1)点连式:如图8-3,相邻同步图形之间仅有一个公共点的连接。
(2)边连式:如图8-4,同步图形之间由一条公共基线连接。

(3)网连式:指相邻同步图形之间有两个以上公共点相连接。
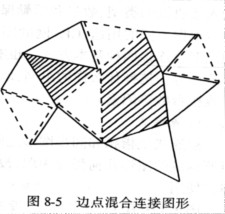
(4)边点混合连接式 :如图8-5,把点连式与边连式有机地结合起来,组成GPS网的方式。
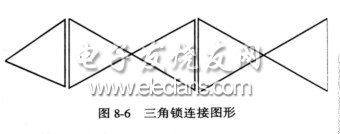
(5)三角锁连接:如图8-6,用点连式或边连式组成连续发展的三角锁同步图形。
(6)导线网形连接:如图8-7。

(7)星形布设:如图8-8
